クラウドファイル共有サービス:Firefox Sendが2020年9月17日終了となりました。弊社テンプレート配布に最適なFirefox Send終了、残念です。代替にGoogle Driveを使いますが、送受双方に手間が1つ増えます。
本稿は、この増えた手間を説明し、セキュリティと利便性が相反することを示します。
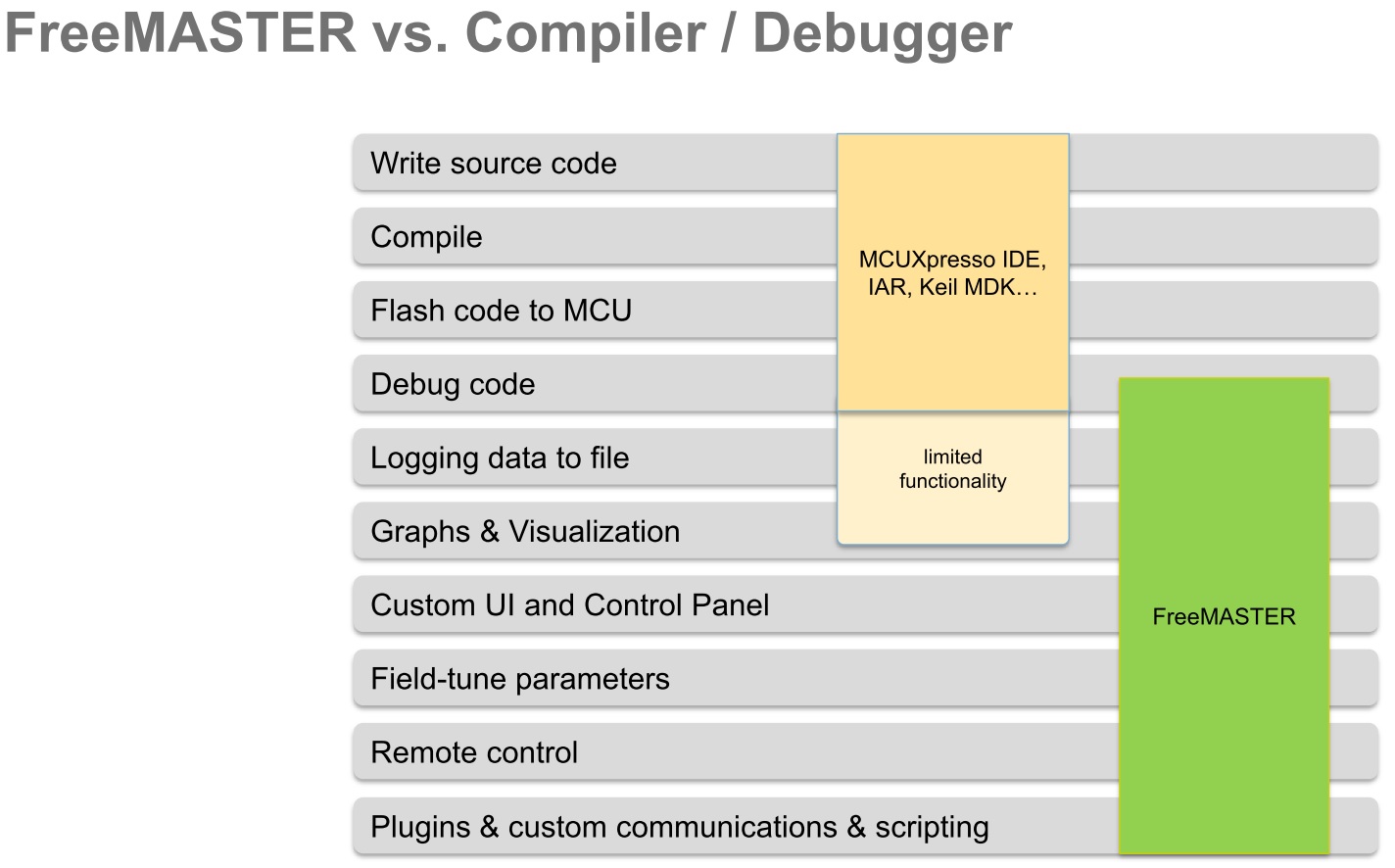
Firefox SendとGoogle Drive比較
Firefox Sendは「ファイル共有」専門サービス。共有ファイル保存期間はアップロード後最大7日、または、ダウンロード1回で共有ファイルがオンライン上から自動的に消去されるなど、「ファイル保存」が主目的のGoogle Driveにない使い勝手がありました。
| Firefox Send | Google Drive | |
| ファイル共有期間 | 最大7日 | 設定不可 |
| 受信側ダウンロード回数 | 1回 | 設定不可 |
| 利用料金 | 無料(最大2.5GB) | 無料(最大15GB) |
| ダウンロード側ログイン | 不要 | 不要 |
| パスワード保護 | 可能 | 可能 |
| 特徴 | ファイル共有に最適 | ファイル保存に最適 |
共有ファイルダウンロードリンクを送信側から受信側へメール通知、受信側がFirefox/Chrome/Edgeなどのモダンブラウザを使って共有ファイルダウンロードに成功しさえすれば、ファイル共有は終了です。ここまでは、Firefox SendとGoogle Drive全く同じです。Firefox Sendは処理完了です。
違いは、Google Driveがファイルの共有期間やダウンロード回数の制限を設けることができない点です。また、受信側が共有ファイルをダウンロードしたことを、送信側が知る手段もありません。
Google Driveでのダウンロード成功後、受信側に成功通知メールをお願いするのは、Firefox Sendでは自動で行われる共有ファイル削除、または、共有停止を送信側が手動にて行うためです。
Firefox Sendに比べ、Google Driveでは送受双方に処理完了までにこの手間が1つ余分に掛かる訳です。
Firefox Send終了理由
Firefox Sendサービス終了の理由は、マルウェア配布手段として悪用されるケースが増え、開発元Mozillaがサービスラインナップ全体コスト、戦略的焦点を見直した結果と発表されています。
高度な暗号化とファイル自動消去のFirefox Send共有サービスは、Firefoxという誰にでも知られた信頼性の高いダウンロードリンククリックだけで簡単にマルウェアをデバイスへ送れます。一般のユーザだけでなく、ハッカーにとっても便利なツールとして悪用されたのでしょう。
無料一時保存ファイルのマルウェア排除を実施することは、無理だとMozillaがあきらめたのだと思います。ただ、次々に生まれるマルウェア排除は、たとえ有料でも困難かもしれませんが…。
セキュリティと利便性の相反例です。また、セキュリティとその対価:費用対効果を考えさせる例でもあります。
企業が自社クローズドサーバーでのみ社員ファイル共有を許可するのは、費用対効果の実現解なのでしょう。
※同様に、IoT MCU開発でもセキュリティ実現解検討が必須です。
Google Drive代替理由
Firefox Send代替にGoogle Driveを選んだ理由は、ファイルの「ダウンロード前や共有前」に、ウィルススキャンが自動的に行われるからです。ウィルス検出時は、警告表示があります。
※ウィルススキャンは圧縮ファイルでも実施されます。但し、パスワード保護を行うとスキャン不可能になりますのでパスワードは設定しません。Firefox Sendでもこれら処理は実施されていたと思いますが…、ハッカーはパスワード保護でスキャンをかわしたのだと思います😥。
無償、セキュリティ、信頼度の高さ、モダンブラウザで利用できる点、これらからGoogle Driveを代替として弊社は選びました。
全テンプレート継続販売
販売中の弊社テンプレートは、戦略的焦点(???)から販売継続いたします。販売中止のサイト変更手間と消えるリンク対応などを考慮すると、そのまま継続販売する費用対効果が高いからです。
本ブログでは、その時々に応じてテンプレート販売中止・終了予定なども記載しますが、マイコンテンプレート名が購入サイトに掲載している限り販売は継続いたしますので安心(?)してご購入ください😌。