組込み開発、特にMCU/MPUソフトウェア開発向けのAI支援環境が整ってきました。現在の環境とAI支援ソフトウェア開発の動向をまとめました。
AI支援ソフトウェア開発環境
- Microchip、MPLAB AIコーディングアシスタント発表、MONOist記事、2025年3月5日
- Eclipse IDEへGitHub Copilot提供、Microsoft、2025年2月12日
- Visual Studio CodeへGitHub Copilot Free提供、Microsoft、2025年1月31日
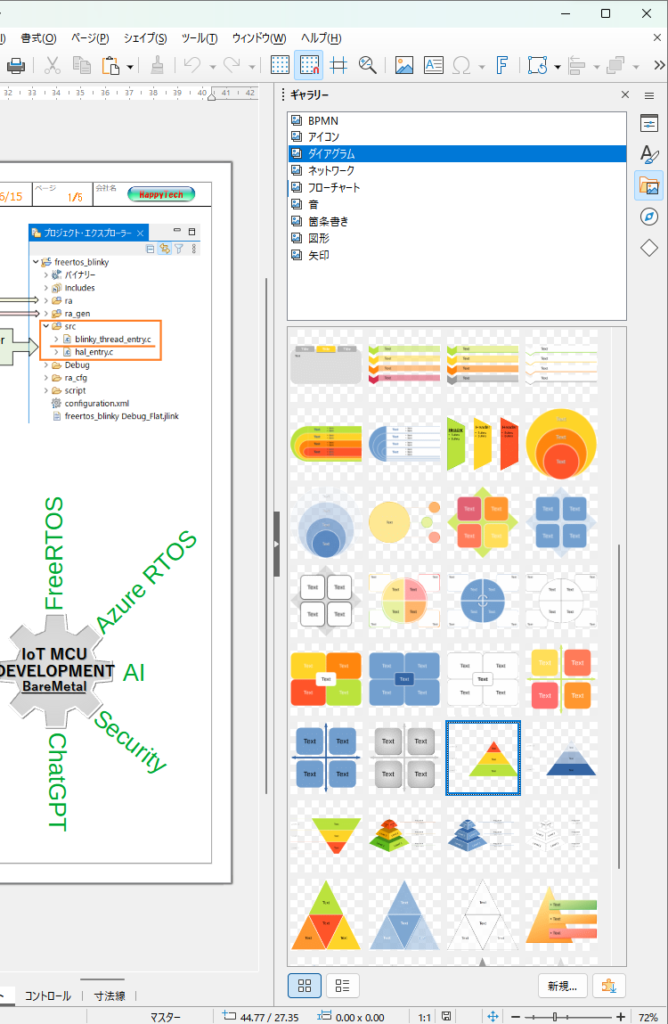
1:米)Microchip社のIDEがMPLAB X IDEです。この拡張機能にAIコーディングアシスタントがあり、無償版と高度機能サブスクライセンス版があります。無償版でもAI知見やコード自動補完、Microchip文書検索、ブロック図作成機能などがありMCUハード/ソフト開発に使えます。
2:MCU/MPU開発のデファクトスタンダードEclipse IDE用AI支援プラグインで、アカウント登録のみでGitHub Copilotが無償利用可能です。月間2000件コード補完、50件チャットアクセスなどの制限付きですが、ベンダ各社のEclipseベースIDEへAI機能の追加ができます。
3:VSCをMCU/MPU開発へ使う動きもあります。このVSC用AI支援プラグインが、GitHub Copilot Freeです。2と同様の制限付きですが、より高度な有償Pro/Business/Enterprise版もあります。
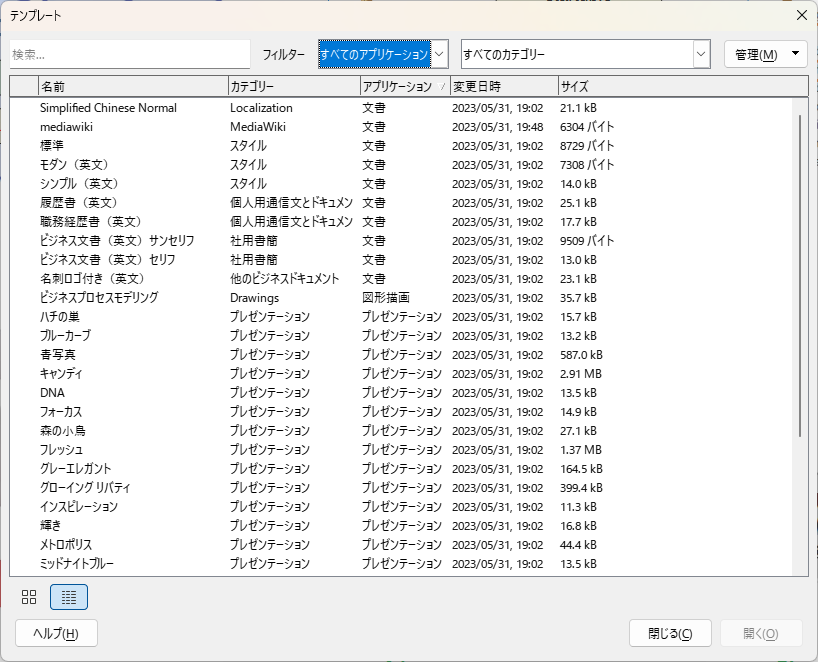
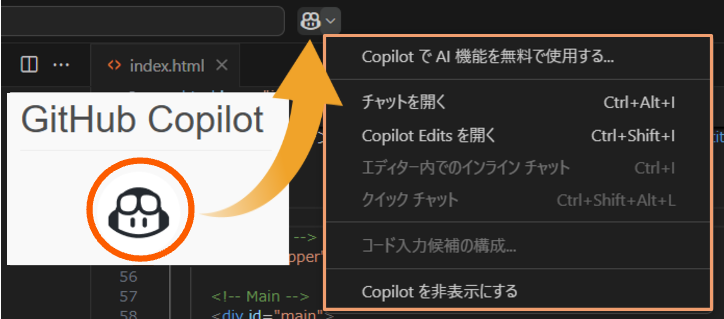
GitHub Copilotプラグインをインストールすると下図GitHub Copilotアイコンが、2のEclipse IDEは下部右端、3のVSCは上部中央に現れます。このアイコン経由でAI機能へアクセスします。
1週間AIコーディングのみの実験
2025年3月3日、社内実験としてエクスプラザ)CTO(Chief Technology Officer)松本 和高氏が、1週間、AIコーディングのみ、人力コード記述禁止令を出しました。狙いは、短期AIオンリーの集中開発でAI視点を広め、AIコーディング開発者育成、AI協業スキル向上などです。
AIを使うエンジニアの方が年収も高い、ITmedia、2025年3月13日という調査結果もあります。
実験結果は、後日発表予定です。
数年後の組込みAIソフトウェア開発
様々なソフトウェアの開発効率が、AI支援や活用により向上することは、既成事実と言えるでしょう。
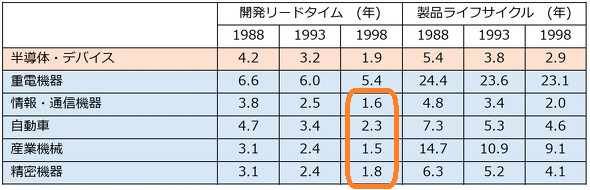
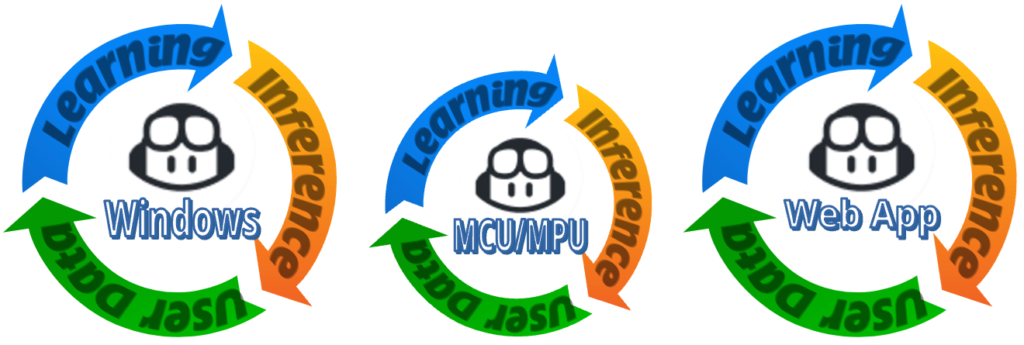
但し、WindowsやWeb開発に比べMCU/MPUソフトウェア開発は、ネットワーク上の公開サンプル数が少ないため、AI学習や推論精度の点で劣る可能性があります。
高性能なAI出力には、学習と推論が重要です。「AI学習」は、多くのデータを解析しパターンや関係性を探ります。学習を重ねる毎に精度が向上し、ミスも減らせます。「AI推論」は、AI学習で得た知識を基に、予測や判断を行います。
従って、ベースになる膨大なデータ(開発事例)が、実質的なAI利用に必須です。データ数の多いWindowsアプリ開発やWebアプリ開発などは、AI支援も有効、有益でしょう。
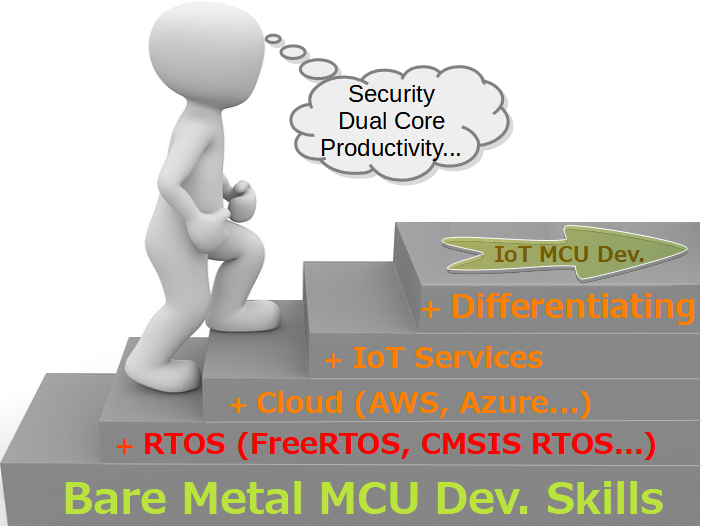
一方、MCU/MPU開発のAI支援は、未だ発展途上です。しかし、AI開発環境整備や利用者増加と共に、数年後には改善されるでしょう。MCU/MPU開発者は、AIプロンプト入力や先行するAI Webアプリ開発などを試すことで、AI支援ソフトウェア開発に徐々に慣れておく必要があります。
数年後は、全てのソフトウェア開発で、AI支援が当たり前の方法になるからです。
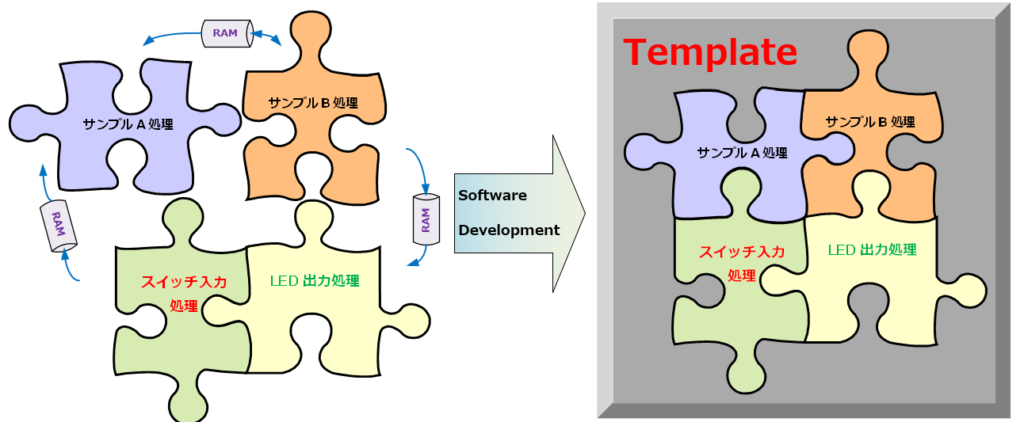
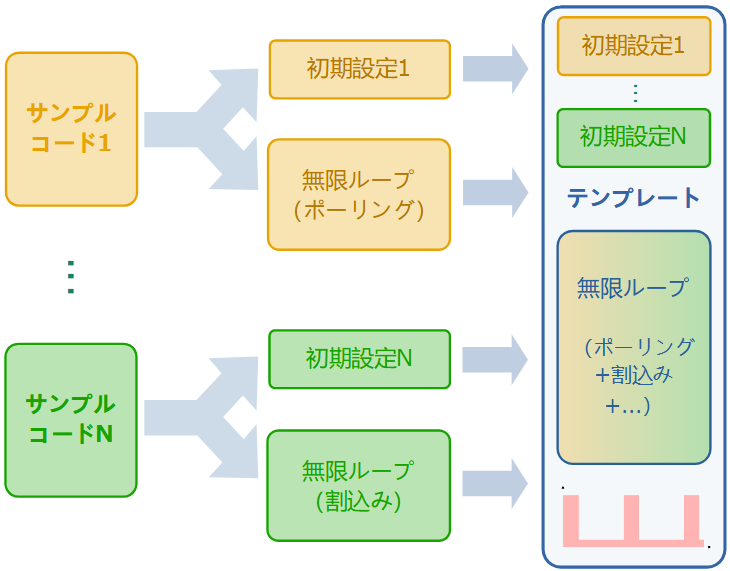
ベンダ提供公式サンプル活用テンプレート
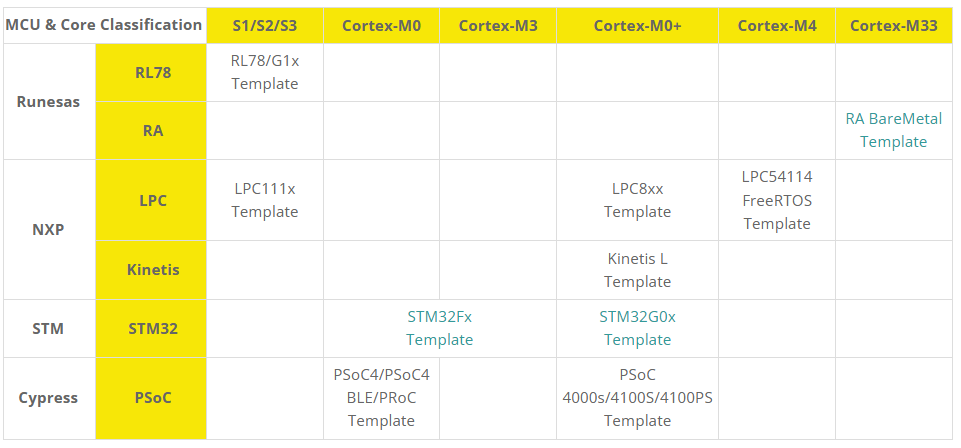
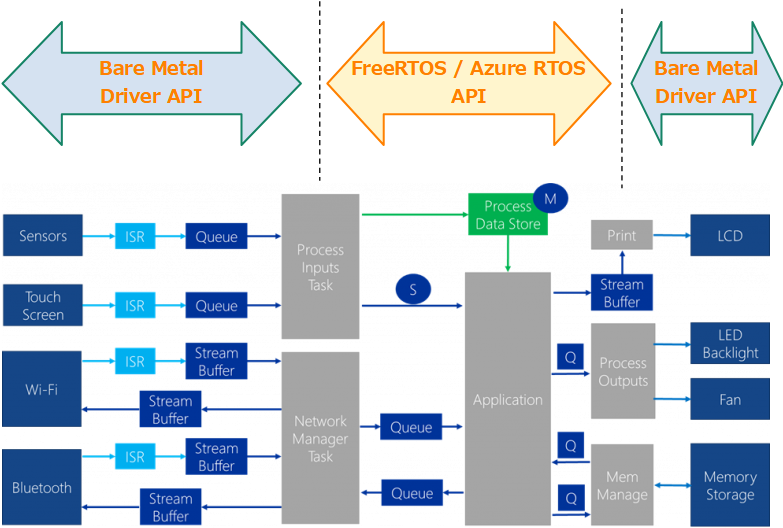
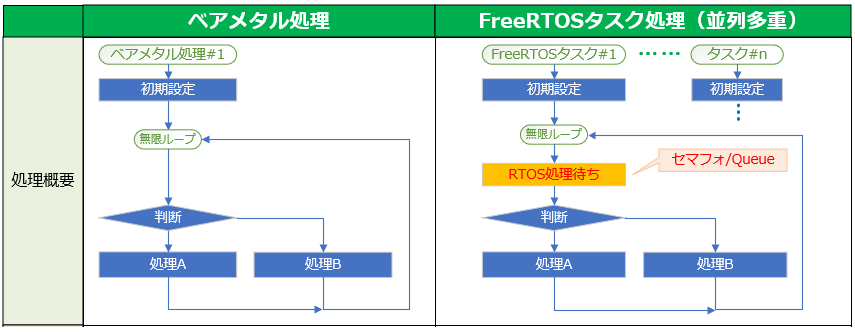
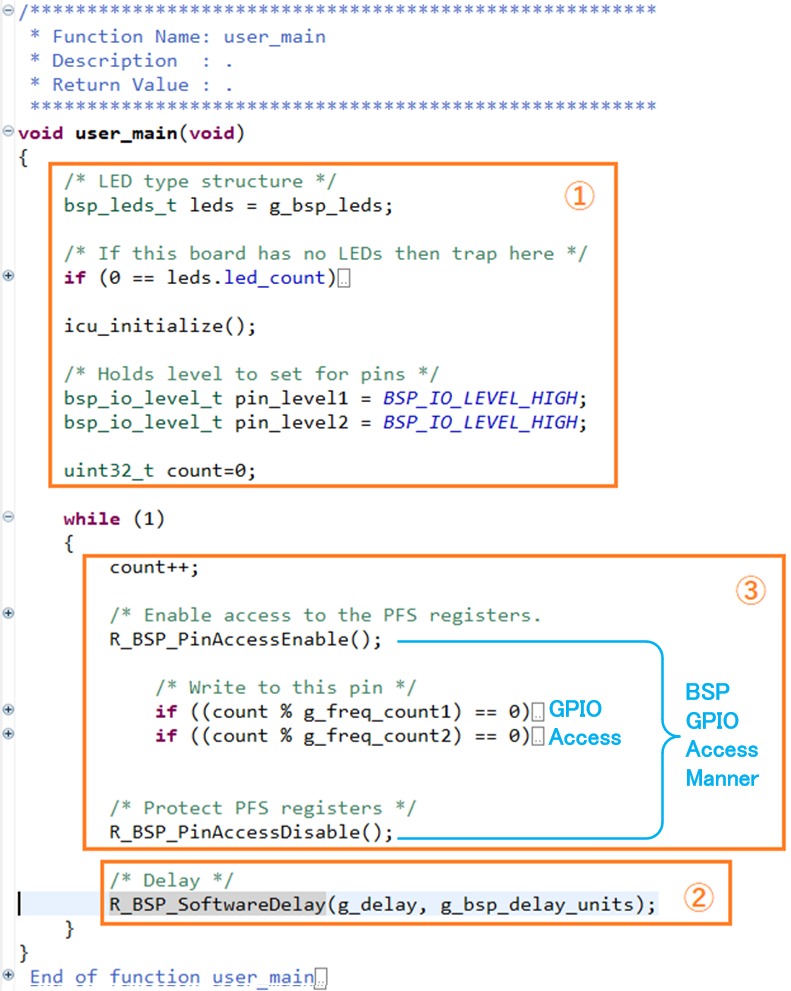
弊社マイコンテンプレートは、ベンダ提供の複数サンプルソフトを簡単に組込めるアプリ開発ツールです。ベンダ公式サンプルを利用しますので、高信頼で効率的な複数ベアメタルMCU機能を、簡単に組込めます。
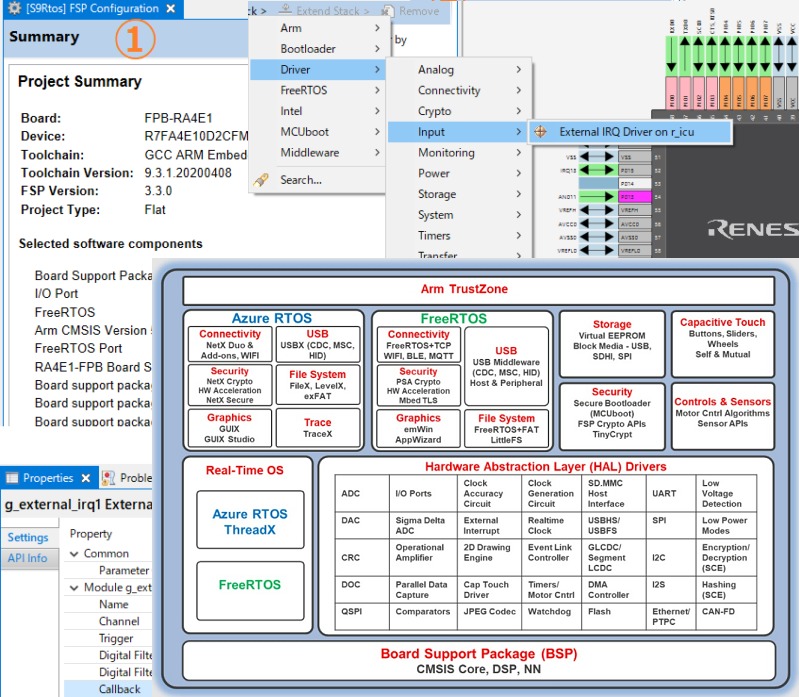
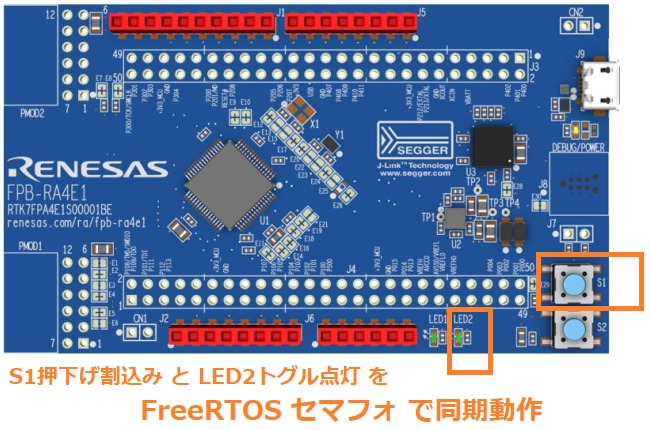
現在、ベアメタルテンプレートと同様のベアメタルサンプルソフトをRTOS環境下で並列動作させるRTOS版テンプレートを開発予定です。RTOS MCUソフトウェアのプロトタイプ開発に向いています。
MCU/MPUソフトウェア開発のAI支援が普及する前段階に、弊社テンプレートを活用してはいかがでしょう!
Summary:AI支援の組込み開発
MCU/MPUソフトウェア開発のAI支援は、WindowsアプリやWebアプリ開発に比べ未だ発展途上です。これは、AI利用のベースになる膨大なデータが不足しているからです。しかし、AI開発環境整備や利用者増加と共に、数年後には改善されるでしょう。
MCU/MPU開発者は、先行するAI Webアプリ開発などを試し、AIプロンプト入力などAI支援開発に慣れる必要があります。数年後は、全てのソフトウェア開発で効率向上を狙うAI支援が当然の方法になるからです。