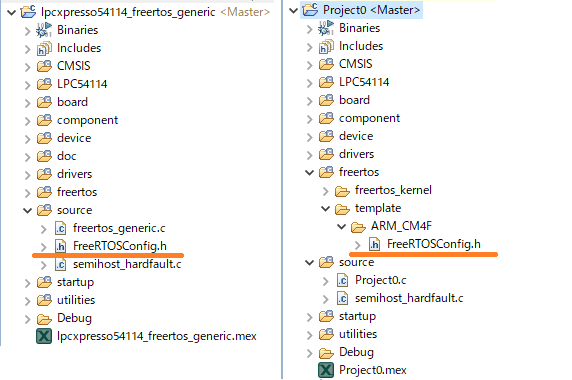
ARM Cortex-M4コア動作のFreeRTOSアプリケーションテンプレート第一弾、NXP)LPCXpresso54114対応版(税込2000円)を本日より発売します。概要、要点、FreeRTOSアプリケーションテンプレートとは、に関する説明資料は、コチラから無料ダウンロードできますのでご覧ください。
開発背景
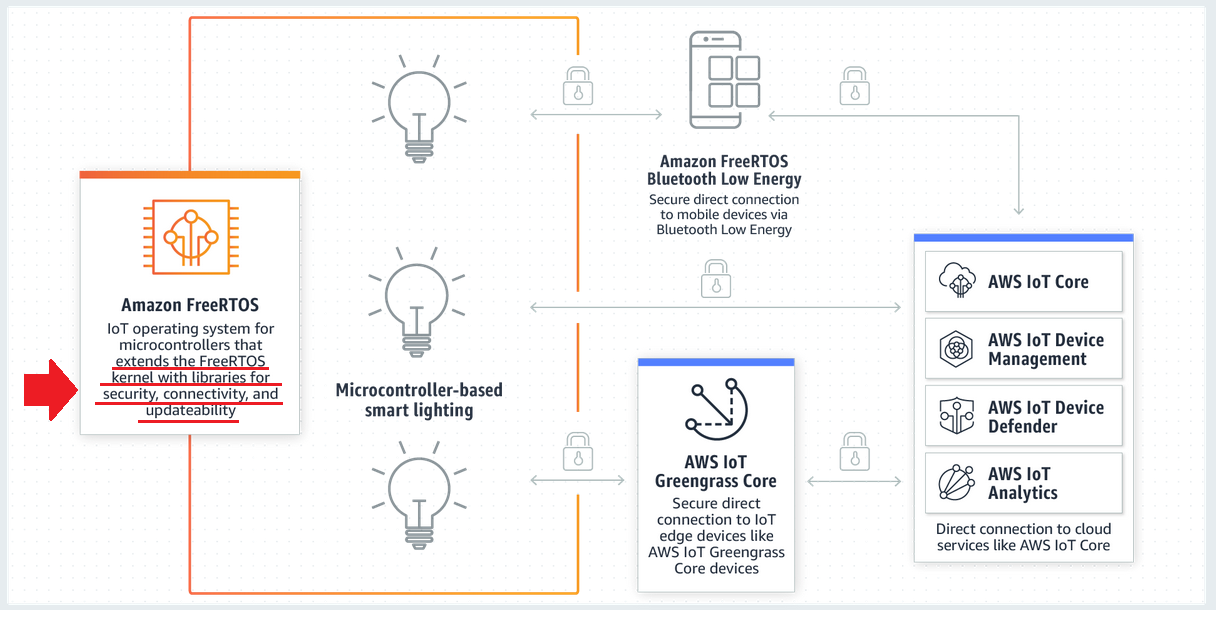
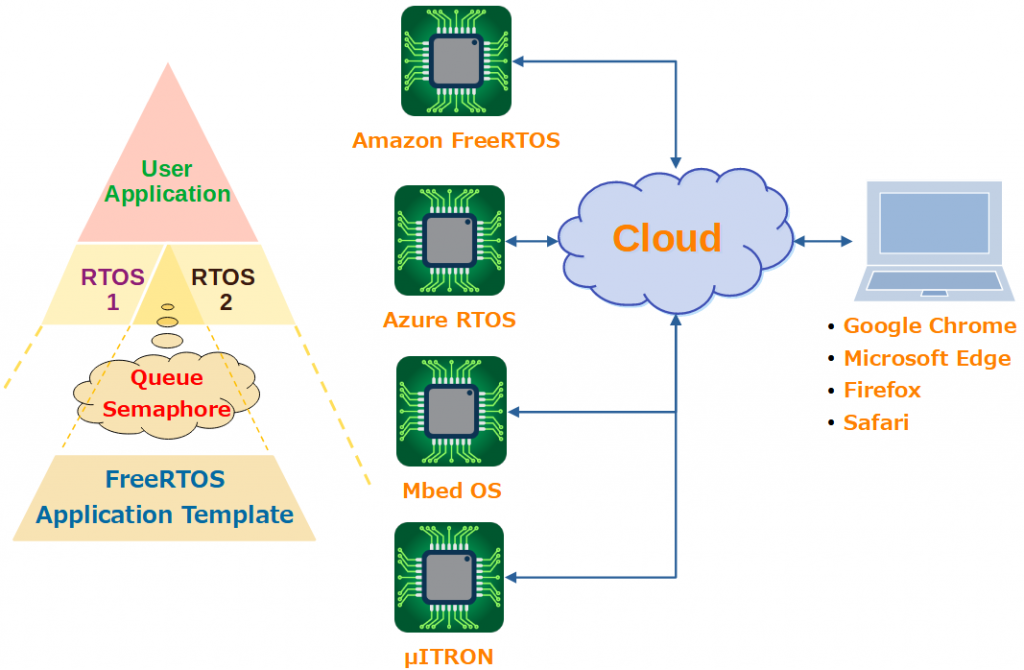
IoT MCUのクラウド接続には、AWSならAmazon FreeRTOS、Microsoft AzureならAzure RTOSなどのRTOSが必要です。クラウド側からは、1つのRTOSライブラリを使って様々なMCUハードウェアを接続するための手段、これがRTOSです。
一方、IoT MCU側からは、接続先サービスに応じたRTOSライブラリ利用に加え、従来のベアメタル開発からRTOS上でのアプリケーション開発へ発展する必要もあります。IoT化に伴うこのような変化に対し、開発者個人が手間なく対応するためのツール、これが弊社FreeRTOSアプリケーションテンプレートです。
目的
FreeRTOSアプリケーションテンプレートの目的は、「RTOS基礎固め」と「FreeRTOSプロトタイプ開発のスタートプロジェクトとなること」の2点です。
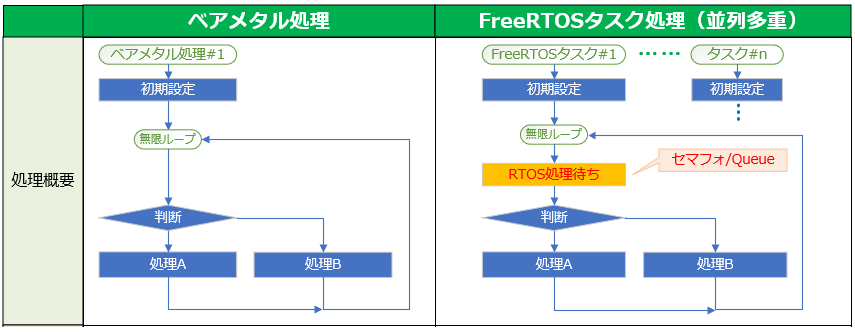
RTOS開発は、ベアメタル開発とは異なります。
RTOS Kernelが、開発した処理(タスクやThread)と他タスクの優先順位により、処理実行/待機を決めます。開発タスク単体の流用性は高まりますが、タスク間同期や通信に、セマフォやQueueなどのRTOS独特の手段が必要です。
IoTにより全てのモノ(MCU)がクラウドへ接続する時代の基盤は、RTOSです。
ベアメタル開発経験者が、このRTOSの早期基礎固め、Kernelと自身で開発したタスクの並列処理を理解するには、個々にRTOS手段を説明するサンプルソフトよりも、具体的なRTOSアプリケーションの方が実践的で役立ちます。
RTOSアプリケーションがあれば、優先順位を変えた時のタスク動作変化や、その他経験に基づいたRTOS実務開発で知りたい事柄を手間なく試し、新たな知見・見識を得られるからです。これらは、サンプルソフトや、説明文から得ることは困難で、実際のRTOSアプリケーションで開発者自身が試行するのがベストです。
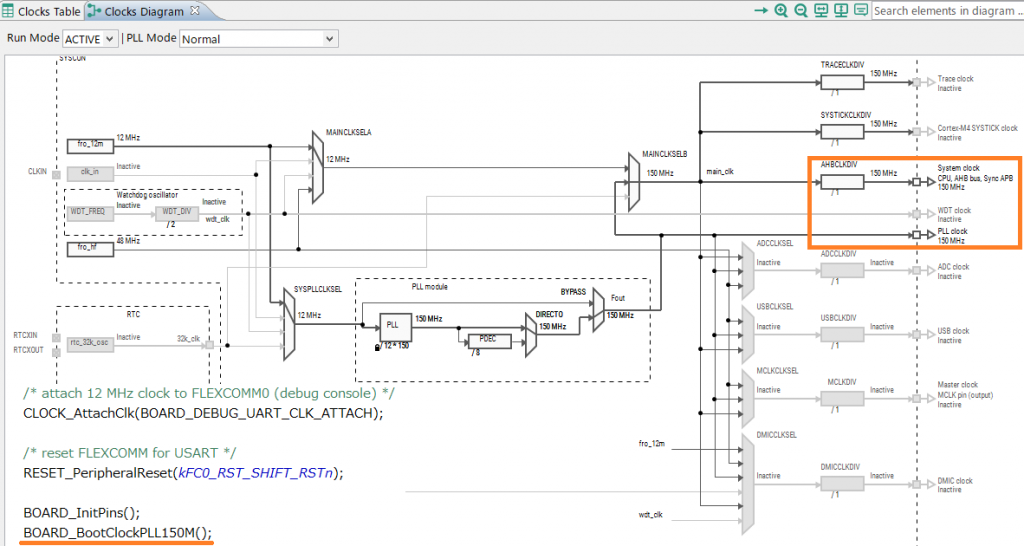
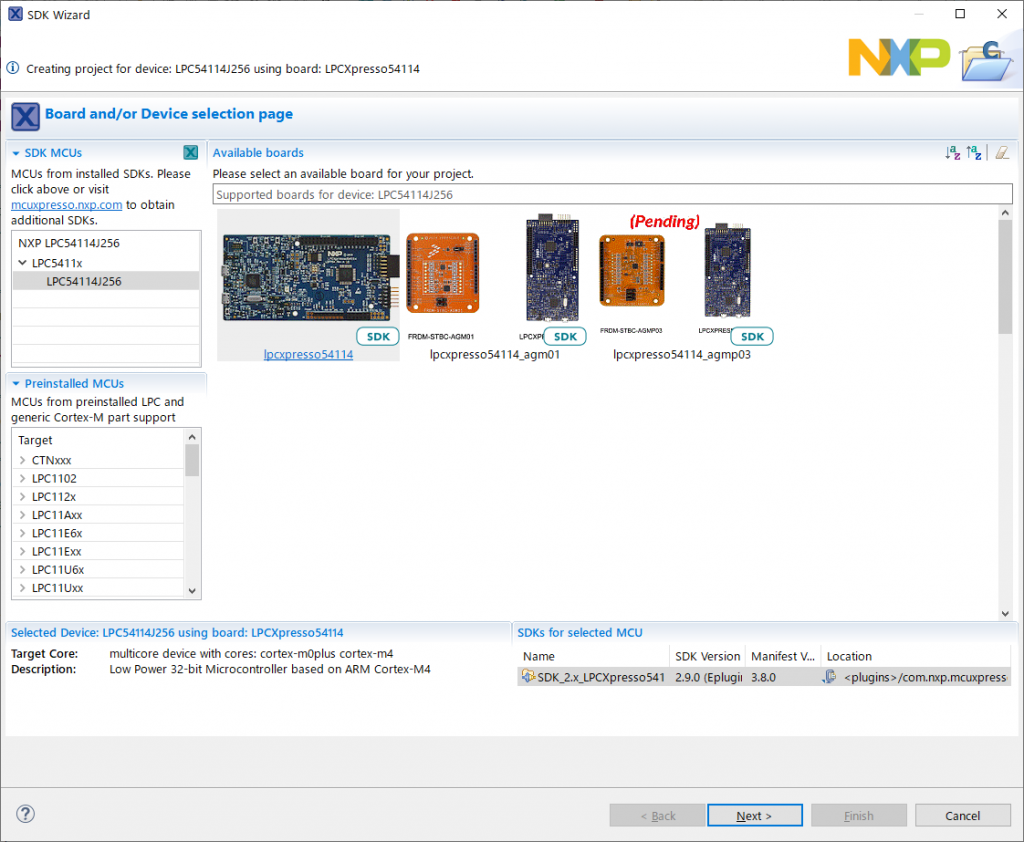
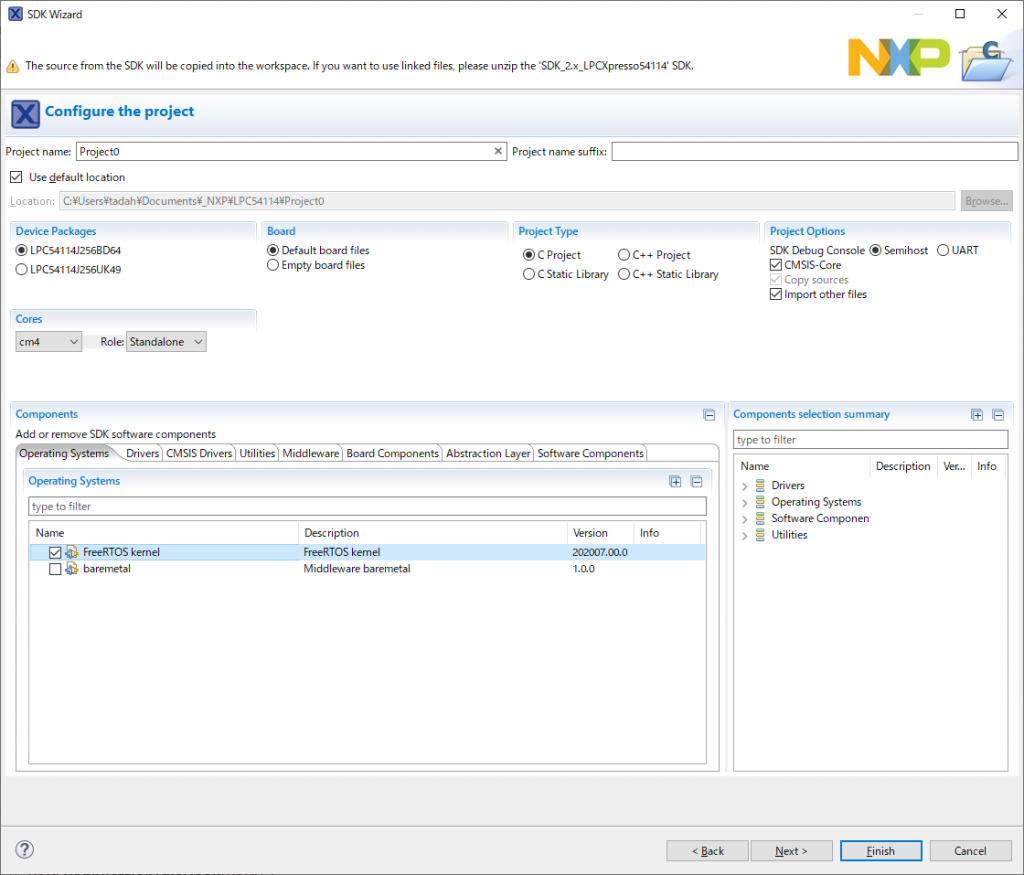
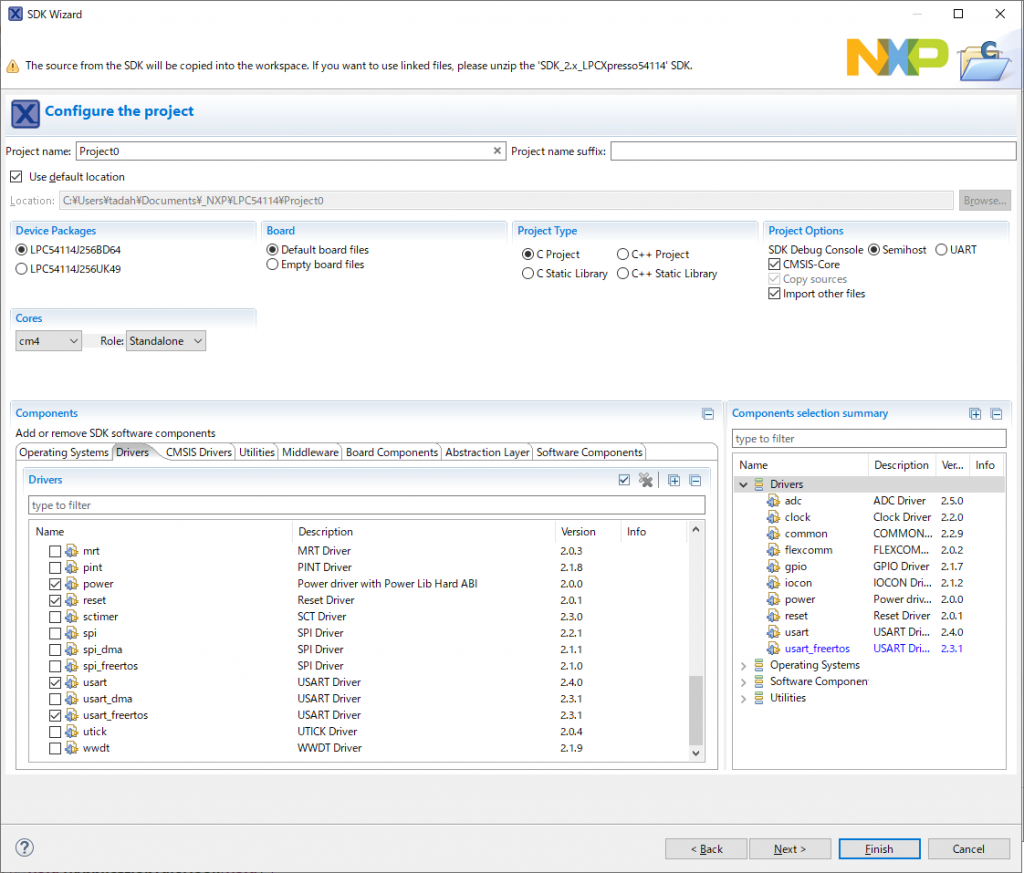
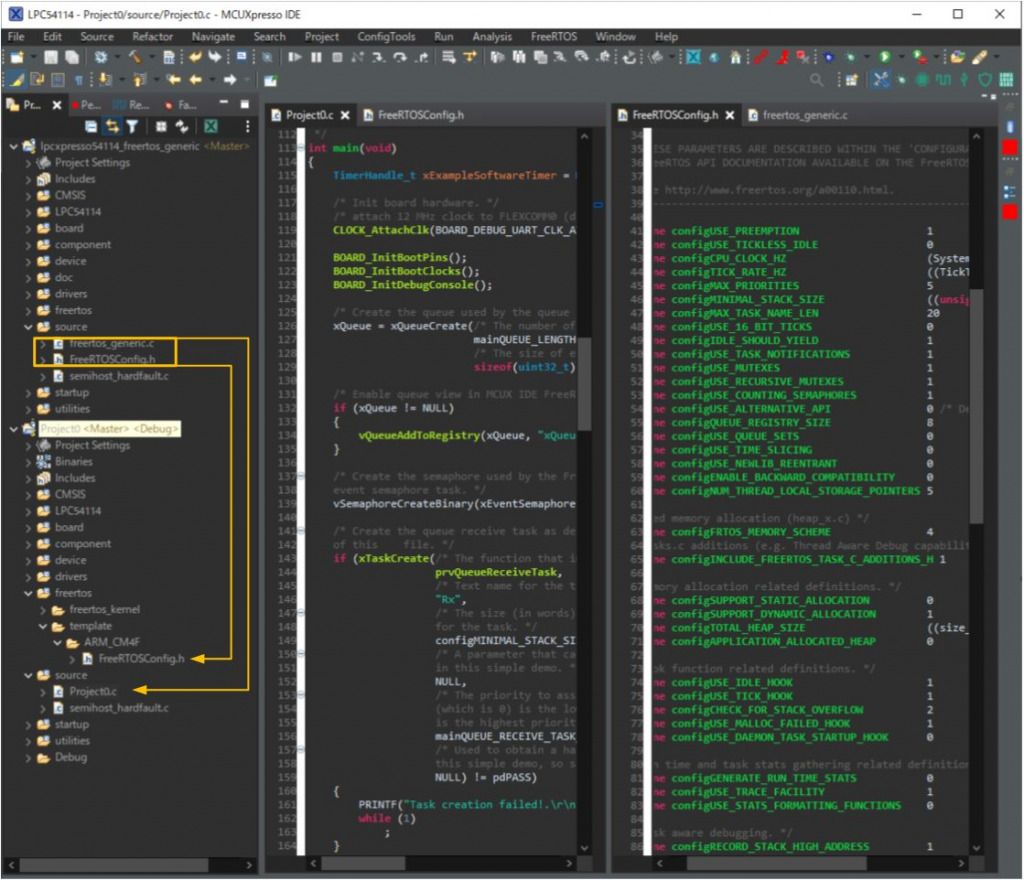
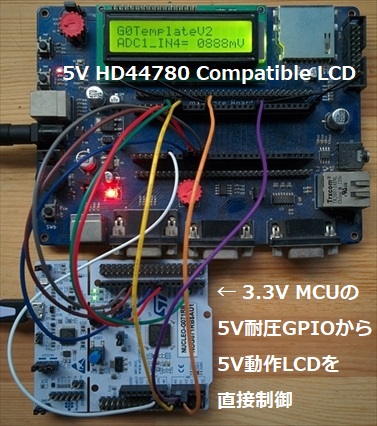
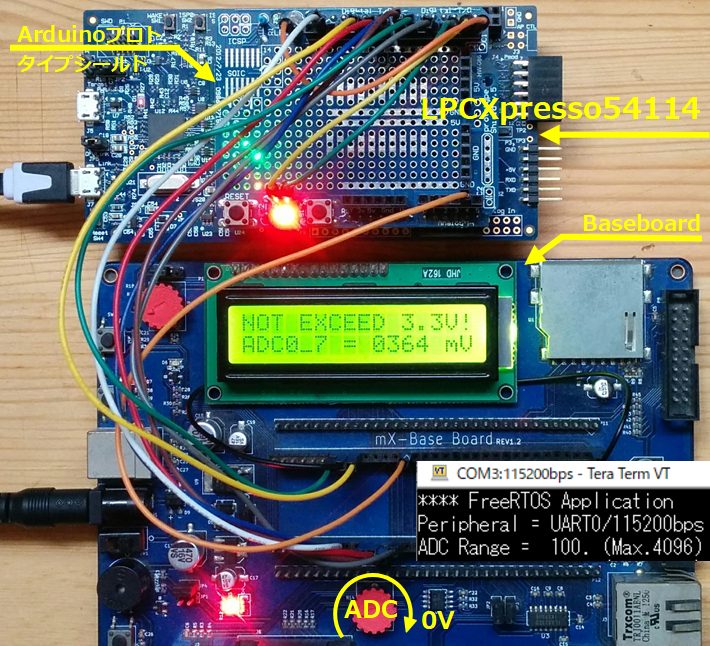
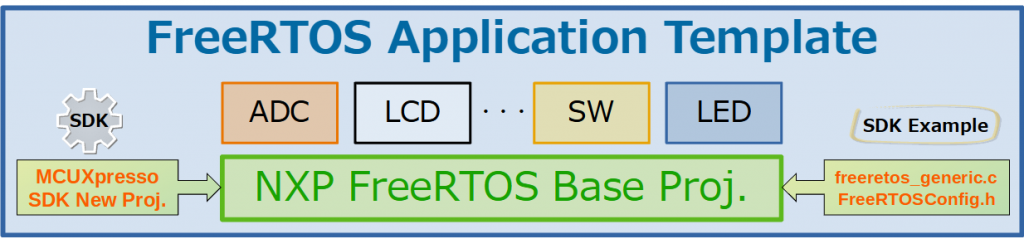
そこで、各FreeRTOS手段を説明した弊社MCU RTOS習得ページを理解した次の段階として、最初の図に示したプロトタイプ開発着手に必須となるADC/LCD/SW/LED/VCOM処理を、NXP)LPCXpresso54114(Cortex-M4/150MHz、Flash/256KB、RAM/192KB)とBaseboard、Arduinoプロトタイプシールドに実装し、動作確認済みRTOSプロジェクトが、FreeRTOSアプリケーションテンプレートです。
※上記プロジェクトは、クラウド接続は行っておりません。RTOS基礎固めとFreeRTOSプロトタイプ開発に適すことが目的ですので、クラウド接続RTOSライブラリは未実装です。
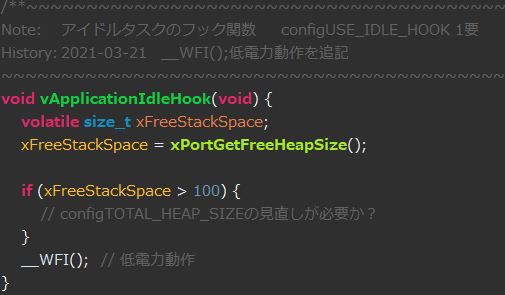
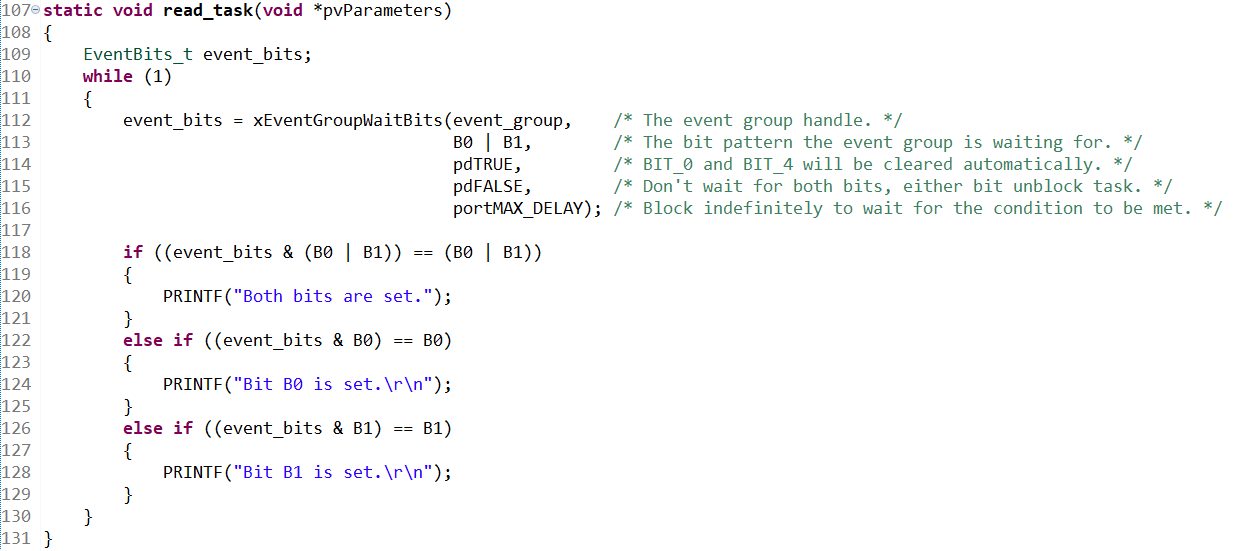
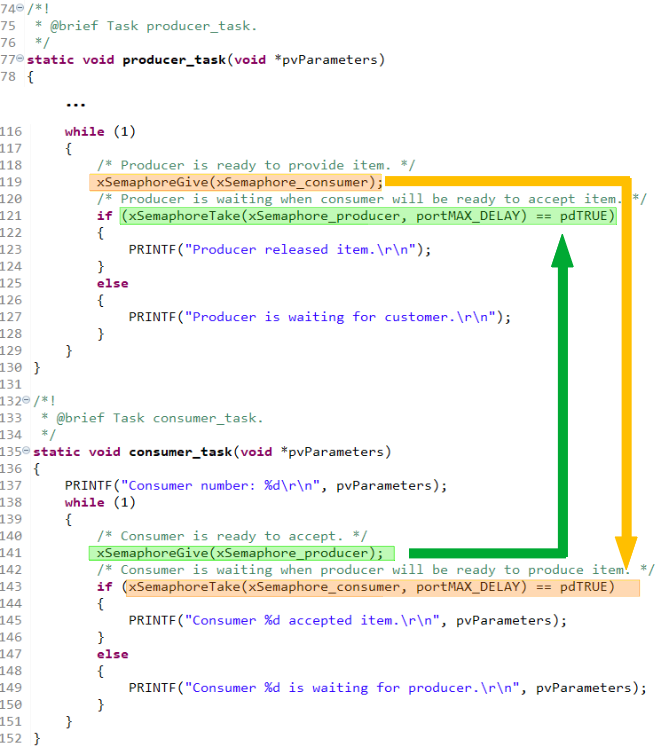
FreeRTOSを選んだのは、現在MCU RTOSシェア1位だからです(関連投稿はコチラ)。RTOS手段は、各RTOS共通技術であるSemaphoreとQueueの2つを用いております。LPCXpresso54114のFlashやRAM使用量にはまだ十分余裕がありますので、より高度なミューテックスやイベントグループなどの手段を適用するのも容易です。
特徴
本テンプレートには、上記FreeRTOSプロジェクトと同じ動作確認済みのベアメタル開発プロジェクトも添付しております。これは、ベアメタル開発に慣れた方が、FreeRTOSとベアメタルの差分をより明確に理解し、比較や評価をするためです(比較・評価は、ご購入者ご自身で行って頂きます)。
本テンプレート付属説明資料は、主にベアメタル開発者視点から見たFreeRTOSプロジェクトを解説しており、ベアメタルプロジェクトに関する説明は、ソースコードを読めばご理解頂けるとして省略しております。
従って、FreeRTOSアプリケーションテンプレートは、ベアメタル開発経験者を対象といたします。ベアメタル初心者の方は、先ずは各MCUベンダCortex-M0+/M3コア対応の従来マイコンテンプレートをご購入ください。従来テンプレート付属説明資料には、ベアメタル動作の詳しい説明が付いています。
※本テンプレートのベアメタルプロジェクトは、従来テンプレートCortex-M0+/M3コアをCortex-M4コア対応へ発展させたものです。ベアメタルプロトタイプ開発着手時に適すプロジェクトです。
FreeRTOSアプリケーションテンプレートは、ベアメタル開発経験者が、手間なく直にRTOSとベアメタルの差を理解・実感し、かつ、IoT基盤RTOSの効率的な基礎固めができるツールです。
なお、既に従来マイコンテンプレートご購入者様は、50%OFF特典があり、税込1000円にて本FreeRTOSアプリケーションテンプレートをご購入頂けます。弊社での確認ミスを防ぐため、ご購入時に従来テンプレート購入者様である旨、お知らせください。
勿論、従来テンプレートとFreeRTOSアプリケーションテンプレートの同時購入でも、この特典は適用されます。
まとめと今後
ベアメタル開発経験者が、IoT MCUクラウド接続に必要となるRTOSの効率的な基礎固め、FreeRTOSプロトタイプ開発着手プロジェクトとして使えることを目的に、NXP)LPCXpresso54114、Baseboard、Arduinoプロトタイプシールドを使ったFreeRTOSアプリケーションテンプレートを発売しました。
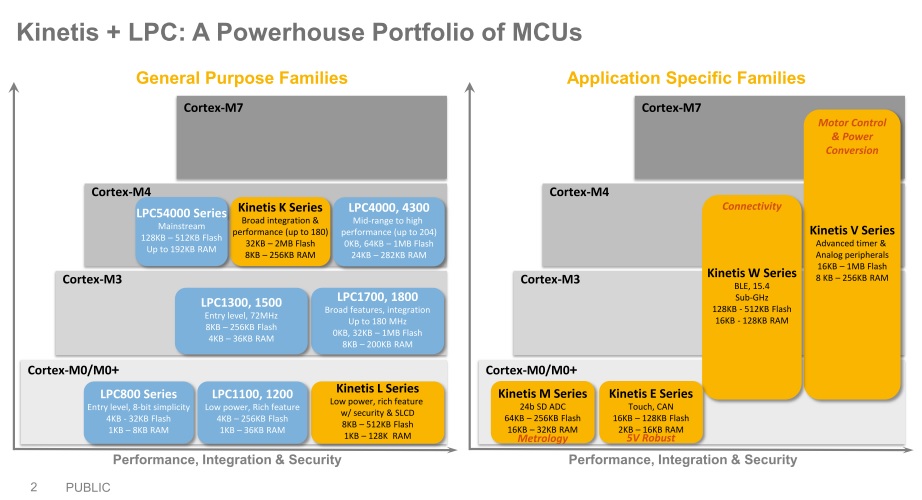
本テンプレートは、Amazon FreeRTOSのHardware Independent FreeRTOS Exampleを原本としています。第1弾はNXP)LPCXpresso54114へ適用しましたが、今後、STマイクロエレクトロニクス)STM32G4やCypress)PSoC 6など他社Cortex-M4コアの対応版も開発予定です。