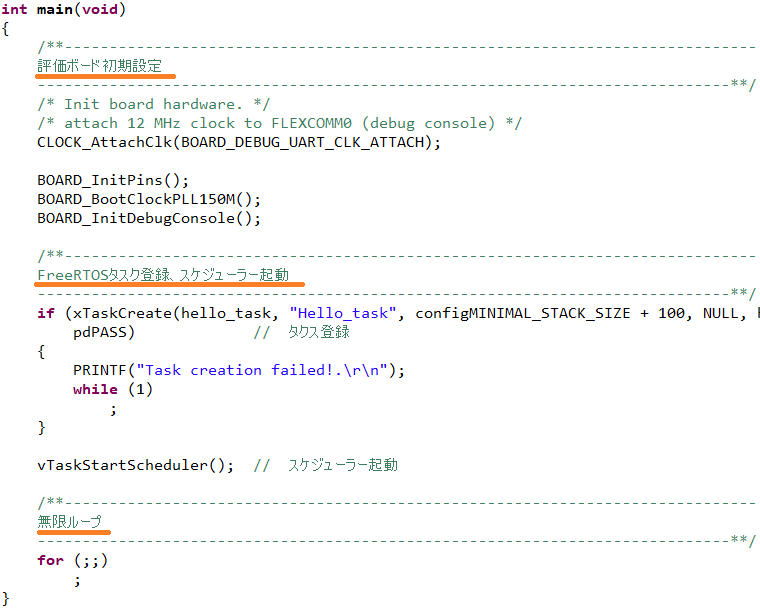
ベアメタルサンプルソフトを活用したFreeRTOSユーザタスクの作り方を示します。先に結論を言うと、ベアメタルサンプルソフト無限ループ内に、RTOS待ち処理を挿入するだけでFreeRTOSタスク開発ができます。
RTOS環境のユーザタスク開発
IoT MCUをAWSやAzureなどのクラウドへ接続する時には、FreeRTOSやAzure RTOSなどのRTOSが必須です。クラウド接続用のRTOSタスク集が入ったライブラリを利用するからです。もちろん、このライブラリ内のタスク開発は必要ありません。
問題は、このIoT MCU RTOS環境で、ユーザタスクをどのように開発するかです。
RTOSの目的は、タスク独立性とリアルタイムなタスク並列多重、MCUハードウェア隠蔽です。ベアメタル開発経験者にとっては、ソフトウェア動作環境が著しく異なることが解ります。
RTOS開発障壁を下げるアプローチ
そこで、ベアメタル開発経験者は、先ずこのRTOS環境の理解に努めます。
セマフォやミューテックス、QueueなどRTOS特有の手段を理解します。弊社も各種FreeRTOS機能を説明しましたし、ウェビナー等でも同様です。但し、このアプローチAは、「RTOSの手段」理解が最初に来ますので、障壁が高いと感じる方も多いでしょう。筆者はそうでした。
そこで、お勧めするのは、RTOS手段をざっと読んだら、今度は逆に「RTOSの目的」からRTOS環境で、複数ユーザタスクを並列多重するアプローチBです。
複数ユーザタクスを、どうすればRTOSへ組込むかを検討するこの逆アプローチBは、Aよりもベアメタル開発経験者向きで、しかもRTOS手段は後回しですので障壁が低く感じられます。
ベアメタル処理のFreeRTOSタスク化と並列多重
2個のベアメタル処理をタスク化し、RTOSで並列多重処理する例で考えます。
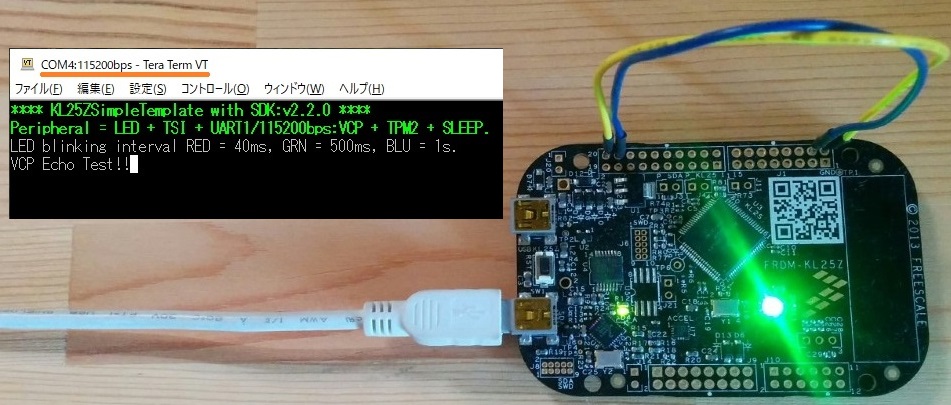
・処理#1:緑LEDを、1秒毎にトグル点灯
・処理#2:赤LEDを、SW押下げでトグル点灯
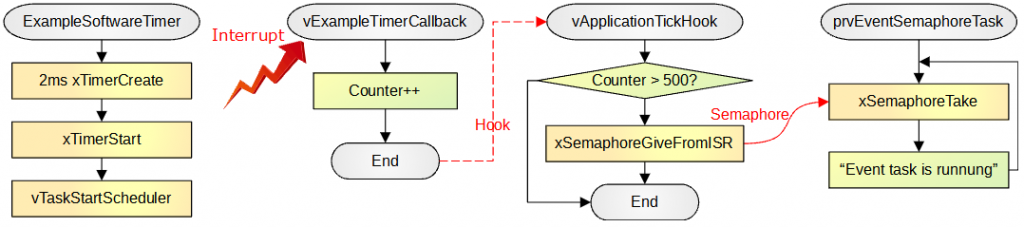
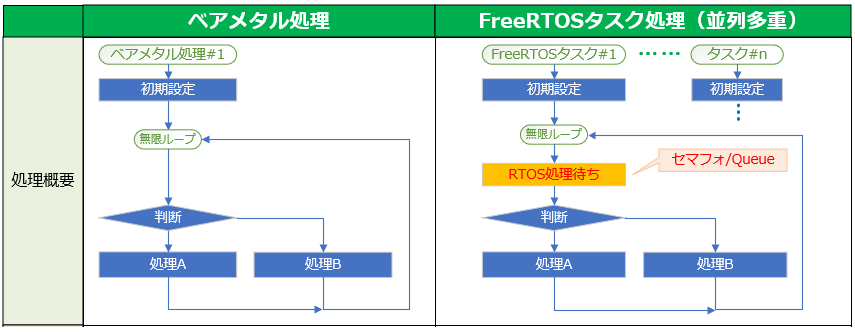
ベアメタル開発経験者なら、どちらの処理も簡単に開発できます。処理概要は、最初図1の左側になります。
違いは判断内容で、処理#1が1秒経過、処理#2がSW割込みです。もちろん、両処理を並列に多重するのは、ベアメタル開発では工夫が必要です。処理#1と#2は、別々のプロジェクト、例えば2個のサンプルプロジェクトとして提供されるのが一般的です。
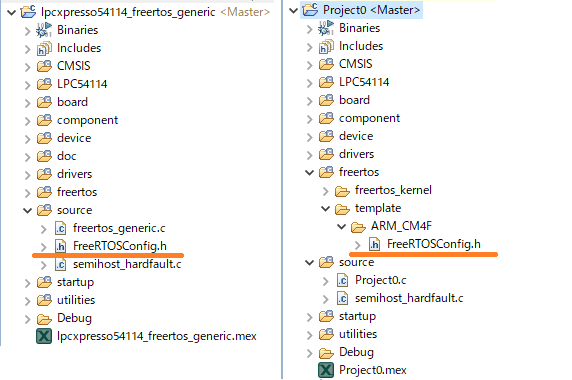
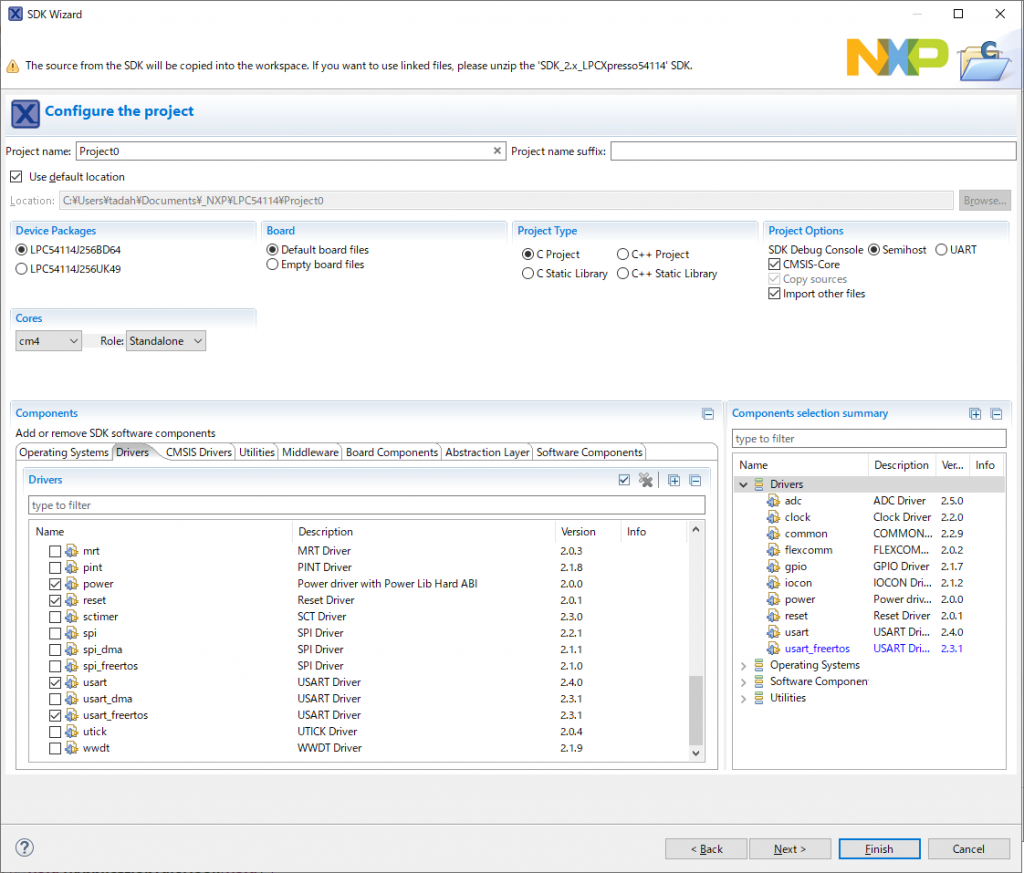
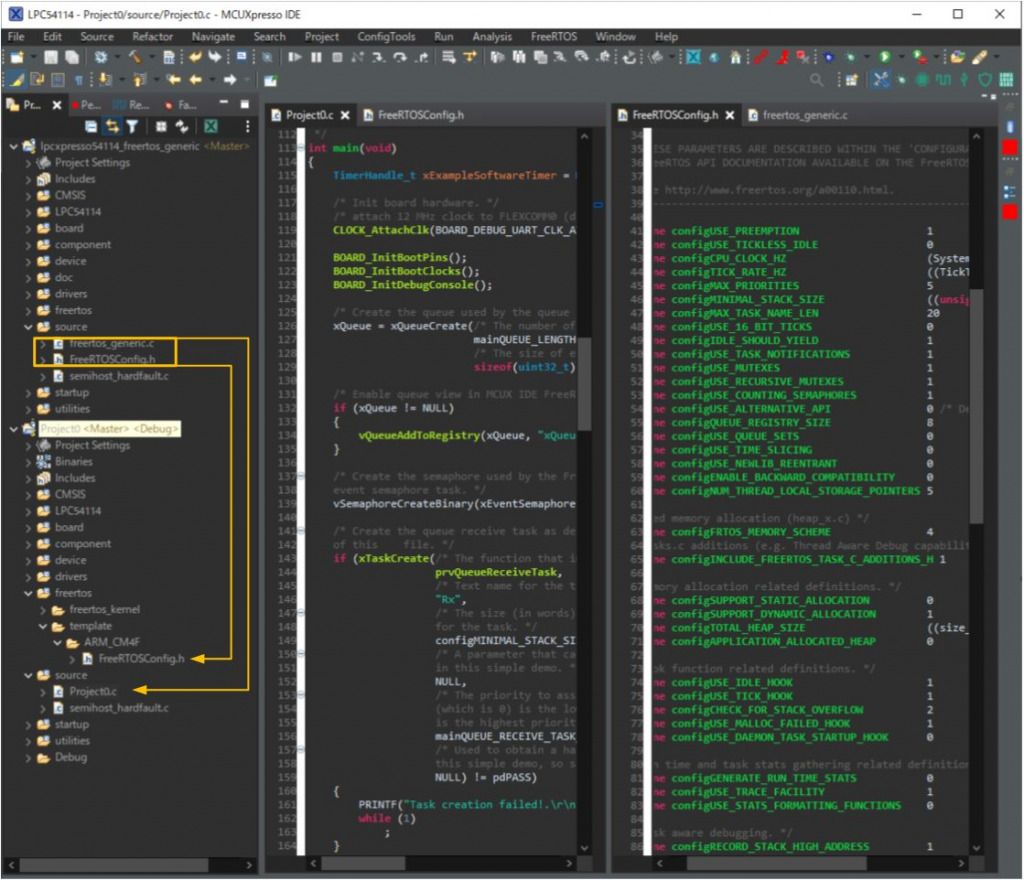
両処理をタスク化して組込むRTOSには、LPCXpresso54114のSDK付属generic_freertosプロジェクトを用います。“generic”が示すように、ハードウェアに依存しない汎用的なFreeRTOSプロジェクトです(generic_freertosの詳細は、コチラの関連投稿を参照してください)。
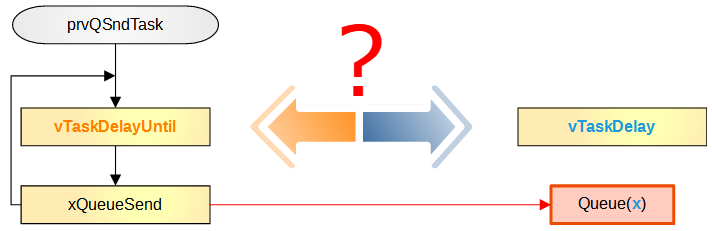
RTOSへ組込んだ時のタスク処理概要が、図1の右側です。ベアメタルとの違いは、タスク#1は、遅延処理vTaskDelayを無限ループに加えること、タスク#2は、割込みISRからの同期セマフォ受信を無限ループに加えることだけです。
両処理へ追加したのは、どちらも「RTOS処理待ち」です。この処理待ちを、RTOSが解除/待ちに切替えることで、複数タスクが並列に動作します。
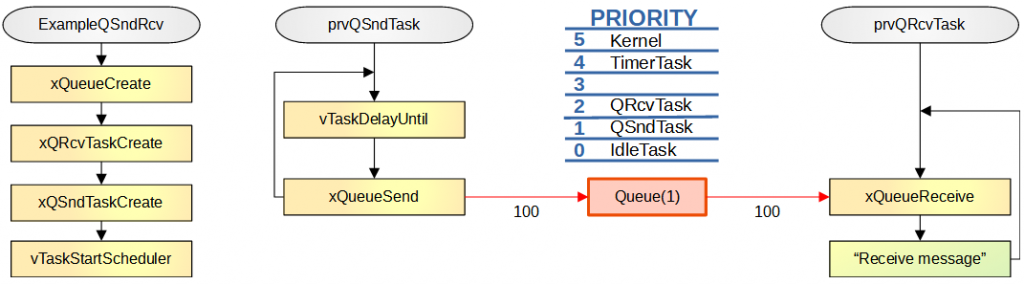
RTOSは、複数タスクを処理待ち状態にし、処理待ちタスクの中から優先順位に応じて1個のタスクを実行状態に割当てます。RTOS(Kernel)自身が、順位判断や実行タスクの切替え、タスク実行状態の保存/リカバリのためスタックプッシュ/ポップ処理を行い、それらの処理間隔がTICK_RATEです。
リアルタイムでタスクを切替えるには、高速なKernel動作(AWSによると25MHz以上)と短期間のTICK_RATE(通常1ms)が必要で、タスク数に応じてスタック使用量(AWS RAM 64KB以上)は急増します。
※数値で示したAWS FreeRTOS必須条件の詳細は、コチラのハードウェア最小仕様要件を参照してください。
要するに、RTOSへユーザタスクを追加するには、ベアメタルでユーザ処理を開発し、その無限ループ内にRTOS処理待ちを加えさえすれば、RTOSユーザタスクになります。
ベアメタル開発経験者がデバッグし慣れた処理がそのままRTOSユーザタスク開発にも使え、RTOS処理待ちは、generic_freertosに実装済みのセマフォとQueueのRTOS手段だけでも、リアルタイムタスク並列多重のRTOSアプリケーション開発ができます。
まとめ
本稿は、IoT MCU RTOS環境でユーザタスクを開発し、FreeRTOSへ実装する方法として、ユーザ処理をベアメタルで開発し、無限ループ内へRTOS処理待ちを加えタスク化する方法を説明しました。
RTOS処理待ちは、セマフォとQueueのRTOS手段を理解していれば、プロトタイプ段階のFreeRTOSアプリケーションとしては十分です。ユーザ処理を自主開発する代わりに、ベンダ提供のベアメタルサンプルソフトを活用すれば、豊富なサンプル処理のFreeRTOSタスク化も簡単です。
タスク化処理を組込むRTOSには、NXP)LPCXpresso54114 SDK付属のgeneric_freertosプロジェクトを使います。このプロジェクトは、ハードウェア非依存の汎用FreeRTOSプロジェクトで、セマフォとQueueを実装済みです。そこで、これら2つのRTOS手段を手始めに理解すれば、RTOS開発障壁も低くなります。
あとがき
本稿で示したユーザタスク追加方法により開発したNXP)LPCXpresso54114(Cortex-M4/150MHz、Flash/256KB、RAM/192KB)で動作確認済みのFreeRTOSアプリケーションテンプレートは、6Eにリリース予定です(ADC入力とLCD出力、VCOM入出力処理も追加済み)。
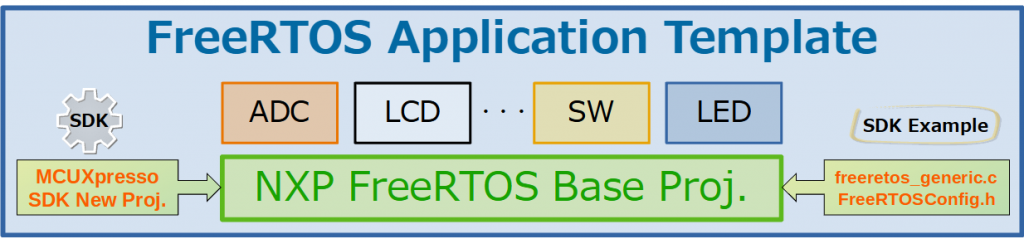
このテンプレートには、FreeRTOSプロジェクトに加え、同じアプリケーション動作のベアメタルプロジェクトも添付します。ベアメタル処理に処理多重の工夫を加えた弊社Cortex-M0+/M3コア向けBaseboardテンプレートを、Cortex-M4コアへも適用したベアメタルプロジェクトです。
FreeRTOS開発とベアメタル開発の、Flash/RAM使用量差、開発難易度、消費電力差などCortex-M4コアMCU開発で実務上知りたい事柄を直接比較・評価することが可能です。また、どちらのプロジェクトも、基本的アプリケーションのテンプレート(=スタートプロジェクト)としても活用でき、プロトタイプ開発に最適です(FreeRTOS/ベアメタルの2プロジェクト+説明資料、税込2000円)。
また、STマイクロエレクトロニクス)STM32G4(Cortex-M4/170MHz、Flash/512KB、RAM/96KB)対応版も開発を予定しています。
FreeRTOSアプリケーションテンプレートを使ったプロトタイプ開発の次の段階としては、セマフォやQueue以外のミューテックスやイベントグループなどのより高度なRTOS手段の利用や、高速でRAM使用量も少ないタスク通知手段などのチューニング開発へとステップアップすることです。