低価格(4000円以下)、個人での入手性も良い32ビットARM Cortex-M4コア評価ボードのRTOS状況を示します。超低価格で最近話題の32ビット独自Xtensa LX6ディアルコアESP32も加えました。
| Vendor | NXP | STマイクロ | Cypress | Espressif Systems |
| RTOS | FreeRTOS Azure RTOS |
CMSIS-RTOS | FreeRTOS Mbed OS |
FreeRTOS |
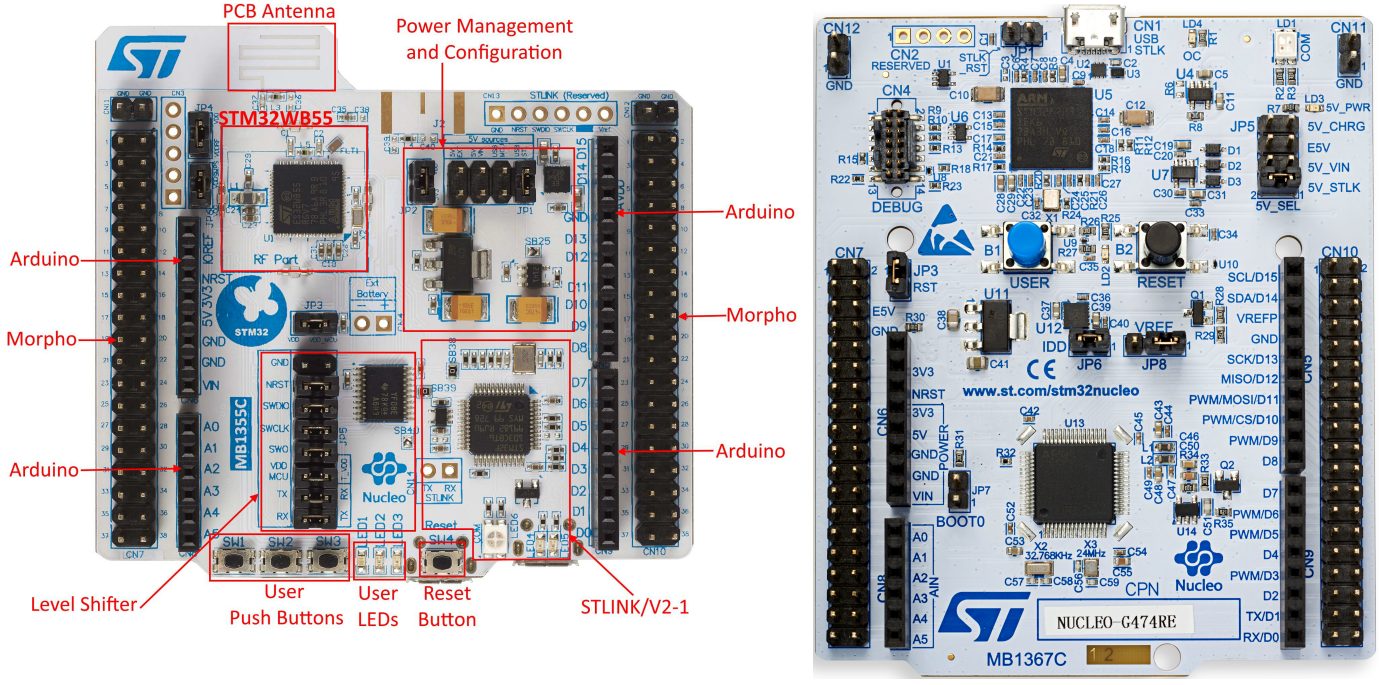
| Eva. Board | LPCXpresso54114 | NUCLEO-G474RE | CY8CPROTO-063-BLE | ESP32-DevKitC |
| Series | LPC54110 | STM32G4 | PSoC 6 | ESP32 |
| Core | Cortex-M4/150MHz | Cortex-M4/170MHz | Cortex-M4/150MHz Cortex-M0+/100MHz |
Xtensa LX6/240MHz Xtensa LX6/240MHz |
| Flash | 256KB | 512KB | 1024KB | 480KB |
| RAM | 192KB | 96KB | 288KB | 520KB |
| 弊社対応 | テンプレート販売中 | テンプレート開発中 | テンプレート検討中 | 未着手 |
※8月31日、Cypress PSoC 6のRTOSへ、MbedOSを追加しました。
主流FreeRTOS
どのベンダも、FreeRTOSが使えます。NXPは、Azure接続用のAzure RTOSも選択できますが、現状はCortex-M33コアが対応します。ディアルコア採用CypressのRTOS動作はM4側で、M0+は、ベアメタル動作のBLE通信を担います。STマイクロのCMSIS-RTOSは、現状FreeRTOSをラップ関数で変換したもので実質は、FreeRTOSです(コチラの関連投稿3章を参照してください)。
同じくディアルコアのEspressifは、どちらもRTOS動作可能ですが、片方がメインアプリケーション、もう片方が通信処理を担当するのが標準的な使い方です。
価格が上がりますがルネサス独自32ビットコアRX65N Cloud Kitは、FreeRTOSとAzure RTOSの選択が可能です。但し、無償版コンパイラは容量制限があり、高価な有償版を使わなければ開発できないため、個人向けとは言えません。
※無償版でも容量分割と書込みエリア指定など無理やり開発するトリッキーな方法があるそうです。
クラウドサービスシェア1位のAWS(Amazon Web Services)接続用FreeRTOSが主流であること、通信関連は、ディアルコア化し分離処理する傾向があることが解ります。
ディアルコア
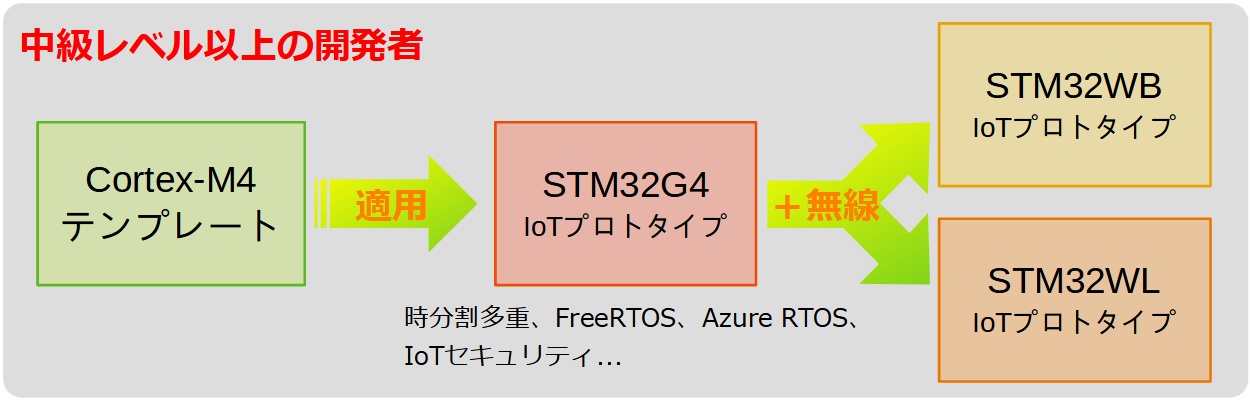
ディアルコアで通信関連を分離する方式は、接続クラウドや接続規格に応じて通信ライブラリやプロトコルを変えれば、メイン処理側へ影響を及ぼさないメリットがあります。
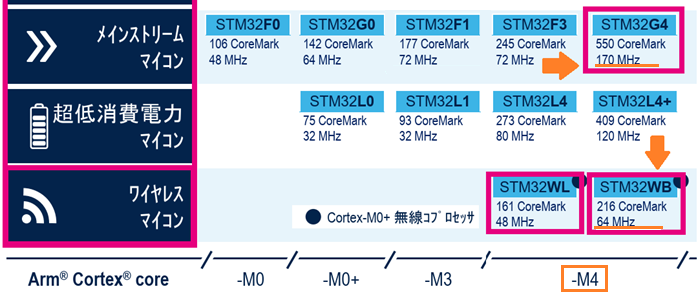
例えば、STマイクロのCortex-M4/M0+ディアルコアMCU:STM32WBは、通信処理を担うM0+コアにBLEやZigBee、OpenThreadのバイナリコードをSTが無償提供し、これらを入れ替えることでマルチプロトコルの無線通信に対応するMCUです。
メイン処理を担うM4コアは、ユーザインタフェースやセンサ対応の処理に加え、セキュティ機能、上位通信アプリケーション処理を行います。
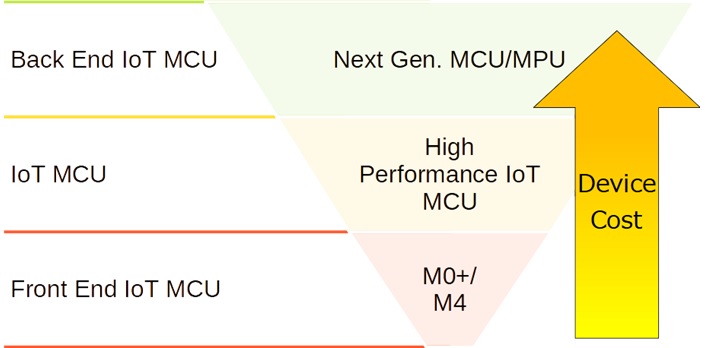
通信処理は、クラウド接続用とセンサや末端デバイス接続用に大別できます。
STM32WBやCY8CPROTO-063-BLEが採用した末端接続用のBLE通信処理を担うディアルコアのCortex-M0+には、敢えてRTOSを使う必要は無く、むしろベアメタル動作の方が応答性や低消費電力性も良さそうです。
一方、クラウド接続用の通信処理は、暗号化処理などの高度なセキュティ実装や、アプリケーションの移植性・生産性を上げるため、Cortex-M4クラスのコア能力とRTOSが必要です。
デュアルコアPSoC 6のFreeRTOS LED点滅
デュアルコアPSoC 6対応FreeRTOSテンプレートは、現在検討中です。手始めに表中のCY8CPROTO-063-BLEのメイン処理Cortex-M4コアへ、FreeRTOSを使ってLED点滅を行います。
と言っても、少し高価なCY8CKIT-062-BLEを使ったFreeRTOS LED点滅プログラムは、コチラの動画で紹介済みですので、詳細は動画をご覧ください。本稿は、CY8CPROTO-063-BLEと動画の差分を示します。
CY8CPROTO-063-BLE のCortex-M4とM0+のmain_cm4.c、main_cm0p.cとFreeRTOSConfig.hが下図です。
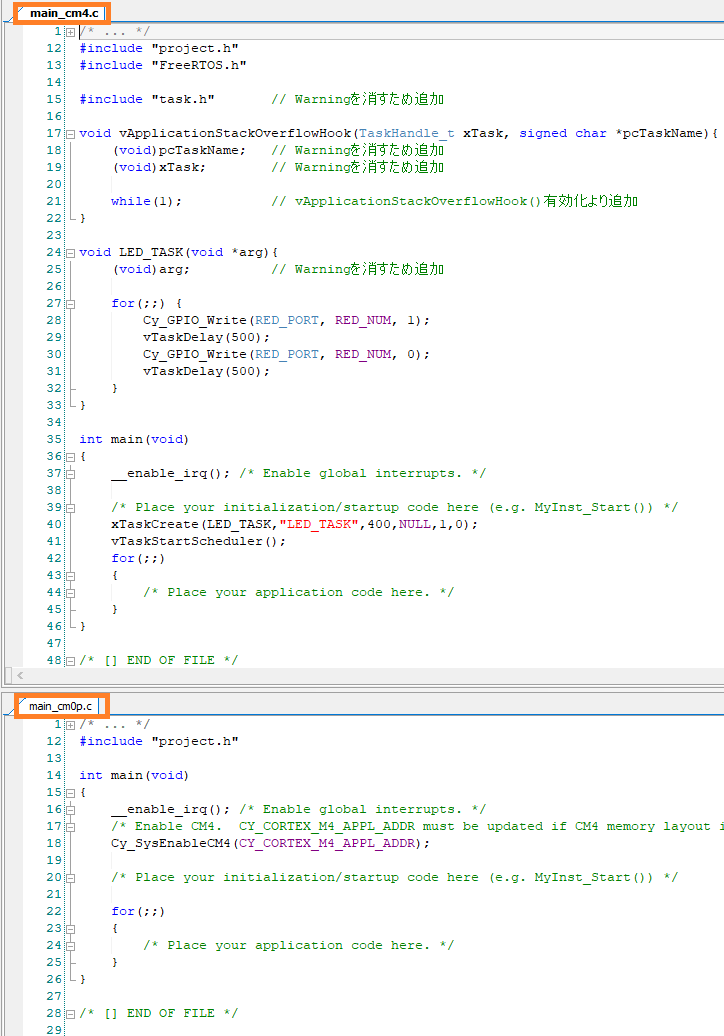
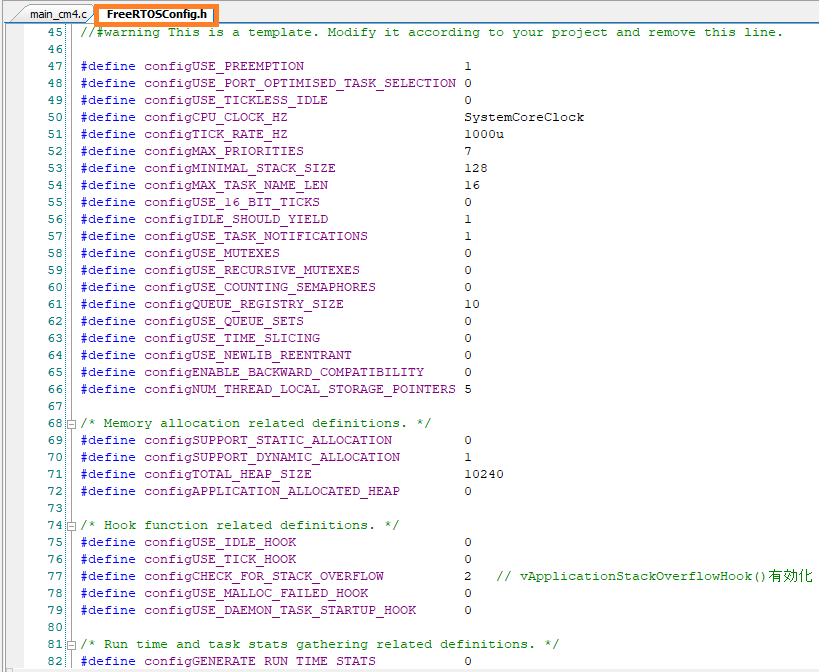
日本語コメント追記部分が、オリジナル動画と異なる箇所です。
RED LEDは、P6[3]ポートへ割付けました。M0+が起動後、main_cm0p.cのL18でM4システムを起動していることが判ります。これらの変更を加えると、動画利用時のワーニングが消えCY8CPROTO-063-BLE でFreeRTOS LED点滅動作を確認できます。
PSoCの優れた点は、コンポーネント単位でプログラミングができることです(コチラの関連投稿:PSoCプログラミング要点章を参照してください)。
PSoC Creator起動時の上図が示すように、Cypressが想定したアプリケーション開発に必要なコンポーネントの集合体が、MCUデバイスと言い換えれば解り易いでしょう。つまり、評価ボードやMCUデバイスが異なっても、使用コンポーネントが同じなら、本稿のように殆ど同じ制御プログラムが使えます。
PSoC 6 FreeRTOSテンプレートも、単に設定はこうです…ではなく、様々な情報のCY8CPROTO-063-BLE利用時ポイントを中心に、開発・資料化したいと考えています。PSoCプログラミングの特徴やノウハウを説明することで、ご購入者様がテンプレートの応用範囲を広げることができるからです。