AMDとIntelのCopilot+ PC準拠40TOPS以上NPU搭載CPU:APU現状ラインナップを調査しました。AMDは、Ryzen AI Max/400/300シリーズという名称で判りますが、Intelは名称からは判り難いためです。
AMD APUラインナップ
AMD社は、コチラで製品ラインナップが分かります。このうちAPUは、「名称にAI」が付いたタイプです。APUを抜粋したのが下表です。
| Ryzen AI Maxシリーズ | GPUモデル | CPU コア | スレッド | Maxブースト | ベース | NPU TOPS | CGコア | cTDP |
| Ryzen AI Max+ 395 | Radeon 8060S Graphics | 16 | 32 | 5.1 GHz | 3 GHz | 50 TOPS | 40 | 55W |
| Ryzen AI Max+ 392 | Radeon 8060S Graphics | 12 | 24 | 5 GHz | 3.2 GHz | 50 TOPS | 40 | 55W |
| Ryzen AI Max 390 | Radeon 8050S Graphics | 12 | 24 | 5 GHz | 3.2 GHz | 50 TOPS | 32 | 55W |
| Ryzen AI Max+ 388 | Radeon 8060S Graphics | 8 | 16 | 5 GHz | 3.6 GHz | 50 TOPS | 40 | 55W |
| Ryzen AI Max 385 | Radeon 8050S Graphics | 8 | 16 | 5 GHz | 3.6 GHz | 50 TOPS | 32 | 55W |
| Ryzen AI 400シリーズ | GPUモデル | CPU コア | スレッド | Maxブースト | ベース | NPU TOPS | CGコア | cTDP |
| Ryzen AI 9 HX 475 | AMD Radeon 890M | 12 | 24 | 5.2 GHz | 2 GHz | 60 TOPS | 16 | 28W |
| Ryzen AI 9 HX 470 | AMD Radeon 890M | 12 | 24 | 5.2 GHz | 2 GHz | 55 TOPS | 16 | 28W |
| Ryzen AI 9 465 | AMD Radeon 880M | 10 | 20 | 5 GHz | 2 GHz | 50 TOPS | 12 | 28W |
| Ryzen AI 7 450 | AMD Radeon 860M | 8 | 16 | 5.1 GHz | 2 GHz | 50 TOPS | 8 | 28W |
| Ryzen AI 7 445 | AMD Radeon 840M | 6 | 12 | 4.6 GHz | 2 GHz | 50 TOPS | 4 | 28W |
| Ryzen AI 5 435 | AMD Radeon 840M | 6 | 12 | 4.5 GHz | 2 GHz | 50 TOPS | 4 | 28W |
| Ryzen AI 5 430 | AMD Radeon 840M | 4 | 8 | 4.5 GHz | 2 GHz | 50 TOPS | 4 | 28W |
| Ryzen AI 300シリーズ | GPUモデル | CPU コア | スレッド | Maxブースト | ベース | NPU TOPS | CGコア | cTDP |
| Ryzen AI 9 HX 375 | AMD Radeon 890M | 12 | 24 | 5.1 GHz | 2 GHz | 55 TOPS | 16 | 28W |
| Ryzen AI 9 HX 370 | AMD Radeon 890M | 12 | 24 | 5.1 GHz | 2 GHz | 50 TOPS | 16 | 28W |
| Ryzen AI 9 365 | AMD Radeon 880M | 10 | 20 | 5 GHz | 2 GHz | 50 TOPS | 12 | 28W |
| Ryzen AI 7 350 | AMD Radeon 860M | 8 | 16 | 5 GHz | 2 GHz | 50 TOPS | 8 | 28W |
| Ryzen AI 5 340 | AMD Radeon 840M | 6 | 12 | 4.8 GHz | 2 GHz | 50 TOPS | 4 | 28W |
| Ryzen AI 5 330 | AMD Radeon 820M | 4 | 8 | 4.5 GHz | 2 GHz | 50 TOPS | 2 | 28W |
| Ryzen AI 7 345 | AMD Radeon 840M | 6 | 12 | 4.6 GHz | 2 GHz | 50 TOPS | 4 | 28W |
現状は、総合AI性能順にAI Max/AI 400/AI 300シリーズの3種があります。AI 400は、AI 300のマイナーチェンジ版、AI 300のGPU高性能版がAI Maxです。NPUはそれぞれ50TOPS程度です。
CPUが処理内容に応じてNPUとGPUへAI処理を振分けるためGPU性能も重要です。AMDラインナップは、総合的なAI性能順に示されています。AI Max+ 395搭載PCが、高性能AIユーザへ人気なのもこれが理由です。
Intel APIラインナップ
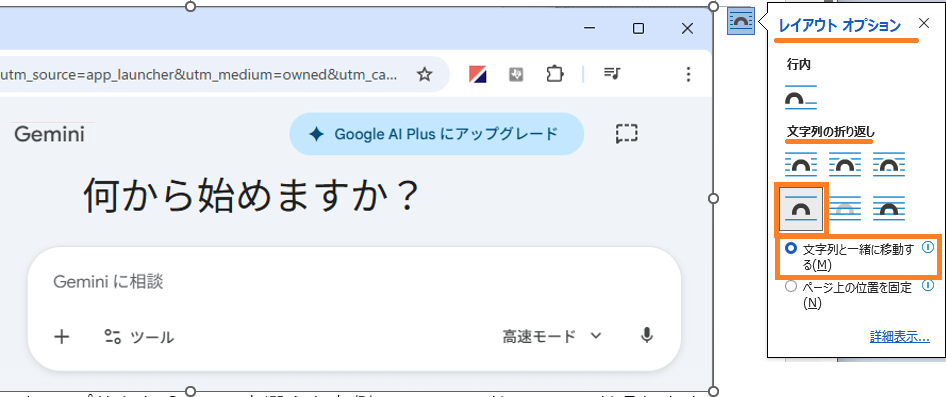
AMDに比べAI性能が判り難いのがIntel APUです。そこで、NotebookLMを使って上記AMDラインナップと同じ項目でIntel APUを性能順に示したのが下表です。
| Core Ultra シリーズ 2 | GPUモデル | CPU コア | スレッド | Maxブースト | ベース | NPU TOPS | CGコア | cTDP |
| Core Ultra 9 288V | Intel Arc Graphics 140V | 8 | 8 | 5.1 GHz | 3.3 GHz | 48 TOPS | 8 (Xe) | 30W |
| Core Ultra 7 268V | Intel Arc Graphics 140V | 8 | 8 | 5.0 GHz | 2.2 GHz | 48 TOPS | 8 (Xe) | 17W |
| Core Ultra 7 266V | Intel Arc Graphics 140V | 8 | 8 | 5.0 GHz | 2.2 GHz | 48 TOPS | 8 (Xe) | 17W |
| Core Ultra 7 258V | Intel Arc Graphics 140V | 8 | 8 | 4.8 GHz | 2.2 GHz | 47 TOPS | 8 (Xe) | 17W |
| Core Ultra 7 256V | Intel Arc Graphics 140V | 8 | 8 | 4.8 GHz | 2.2 GHz | 47 TOPS | 8 (Xe) | 17W |
| Core Ultra 5 238V | Intel Arc Graphics 130V | 8 | 8 | 4.7 GHz | 2.1 GHz | 40 TOPS | 7 (Xe) | 17W |
| Core Ultra 5 236V | Intel Arc Graphics 130V | 8 | 8 | 4.7 GHz | 2.1 GHz | 40 TOPS | 7 (Xe) | 17W |
| Core Ultra 5 228V | Intel Arc Graphics 130V | 8 | 8 | 4.5 GHz | 2.1 GHz | 40 TOPS | 7 (Xe) | 17W |
| Core Ultra 5 226V | Intel Arc Graphics 130V | 8 | 8 | 4.5 GHz | 2.1 GHz | 40 TOPS | 7 (Xe) | 17W |
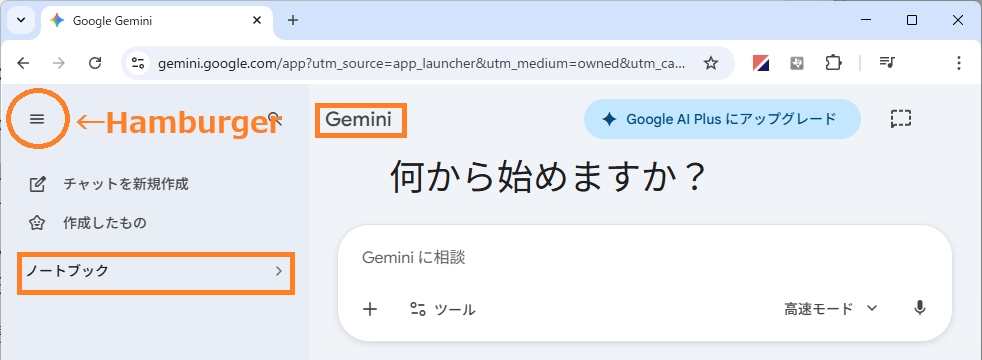
現在のIntel APUは、「Core Ultra 9/7/5シリーズ2 (Lunar Lake)」です。つまり、名称に「Core Ultra X 200番台で最後がV」がCopilot+ PC準拠タイプです。
Intel Core UltraのNPU TOPS値は、AMD AI Max/AI 400/AI 300とほぼ同じ、GPUもAMD Radeon 800Mシリーズとほぼ同性能です。特徴は、デフォルトTDP:cTDPが低い点とシリーズ名最後の数値、例えば、Core Ultra 7 268Vの8とCore Ultra 7 266Vの6が、MoP(Memory on Package)容量を示す点です。
名称最後の8が32MB、6が16MBを示します。Intelは、AMDよりもAPU出荷が出遅れたため、対抗策にMoP技術を使ったTDPが低い製品開発を行いました(MoP詳細は前投稿を参照ください)。
但し、32GB搭載APUでも全てのAI処理、例えばLLM処理が実行できるかは疑問です。軽度なAI処理向きのラインナップと言えそうです。
x64陣営APU特徴
x64陣営のAMD/Intel APUラインナップを比較します。
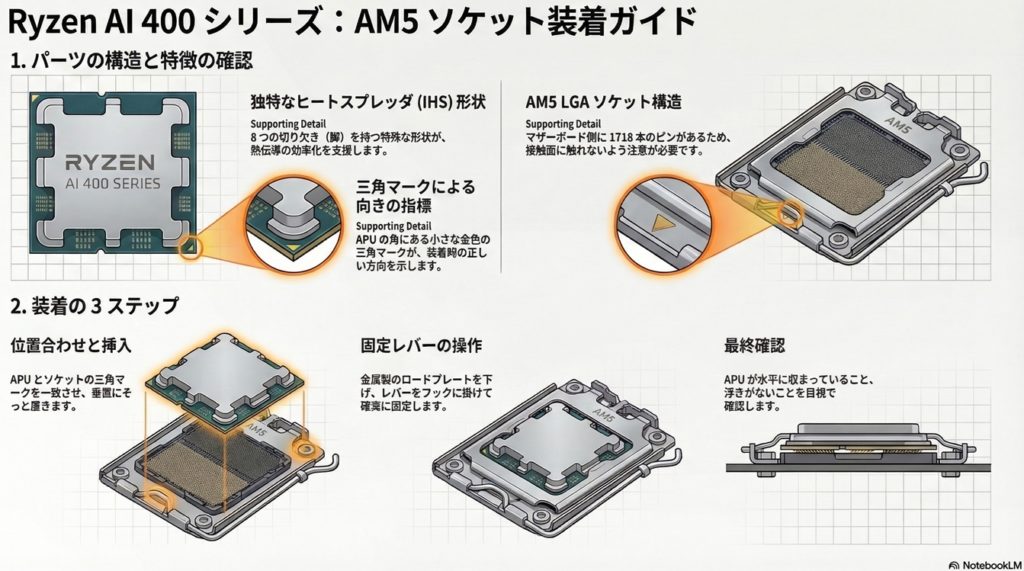
AMD APUは、ノートPCやデスクトップPCなどCopilot+ PC用途に分けず従来のCPU/GPU/NPU個別性能強化による「全方位APU設計」です。AI 400シリーズでは、デスクトップPC向けにAM5ソケットへも対応しました。
一方、Intel APUは、ARM64陣営のSnapdragon APUにも見られるMoPによる低消費電力化など処理に応じた「最適APU設計」です。これは、IntelとApple接近の先駆けかもしれません。
AI PC性能は、ハードウェアのCPU/GPU/NPU (APU)だけでなく搭載メモリ量にも依存します。ユーザがAI PCに何を求めるかがCopilot+ PCの重要な選択基準となるでしょう。
Summary:AMDとIntelのAPU比較
40TOPS以上NPU搭載がCopilot+ PCの条件です。この条件を満たすx64陣営のAMD/Intel現状APUラインナップを調査しました。AMDはAI全方位設計、Intelは軽量AI最適設計です。ちなみにARM64陣営のSnapdragonは、Intelよりも重いAI最適設計だと思います(理由は前投稿参照)。
メモリ高騰などPCハードウェア環境が激変する状況下、各社APU現状とユーザが今後どのようにAI(Copilot+ PC)を利用するかは、AI PC選択に重要です。しかし、先行きは年単位で不透明です。
AI性能がCPU/GPU/NPU(=APU)と搭載メモリハードウェアに大きく依存するため、ローカルAIサービス依存のAPU選択となるでしょう。
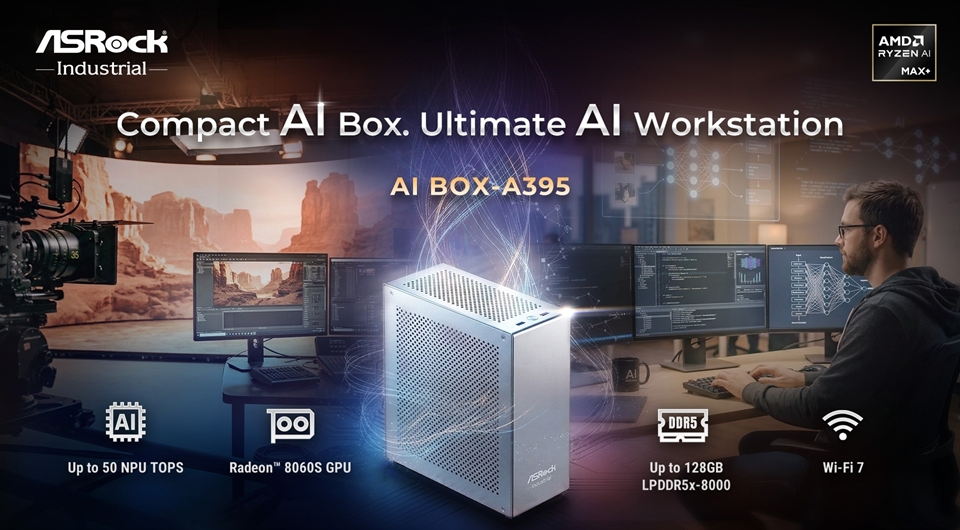
Afterword:AMD Ryzen AI Max PRO 400シリーズ発表
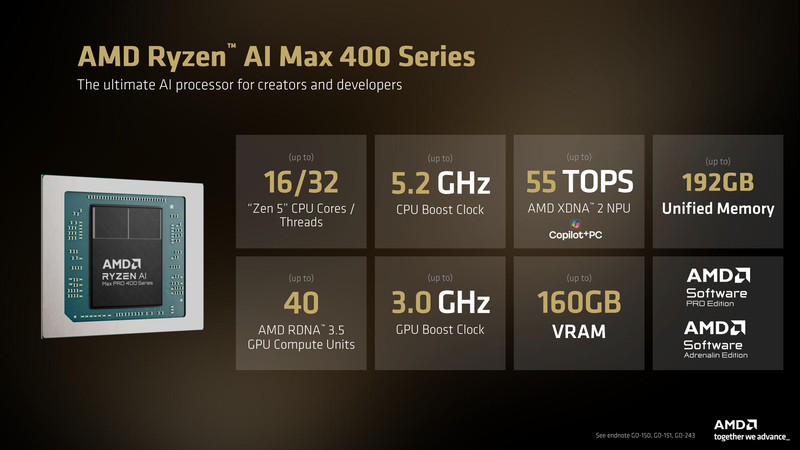
AMDは2026年5月21日、総合126TOPS Ryzen AI Max+ 395より更に上位のCopilot+ PC準拠Ryzen AI Max PRO 400シリーズを発表しました。総合192TOPS、メモリ最大192GB、最大160GBをVRAMへ割り当てられるユニファイドメモリ、cTDP 45~120Wです。搭載ミニPCが期待できます。