ルネサスは、最近元気です。特にRAファミリMCUにその傾向が顕著です。RAファミリ最新情報を2件ピックアップし、ルネサスRAファミリソフトウェア開発の鍵:FSP習得の重要性を示します。
Cortex-M85搭載AI処理実装RAファミリ
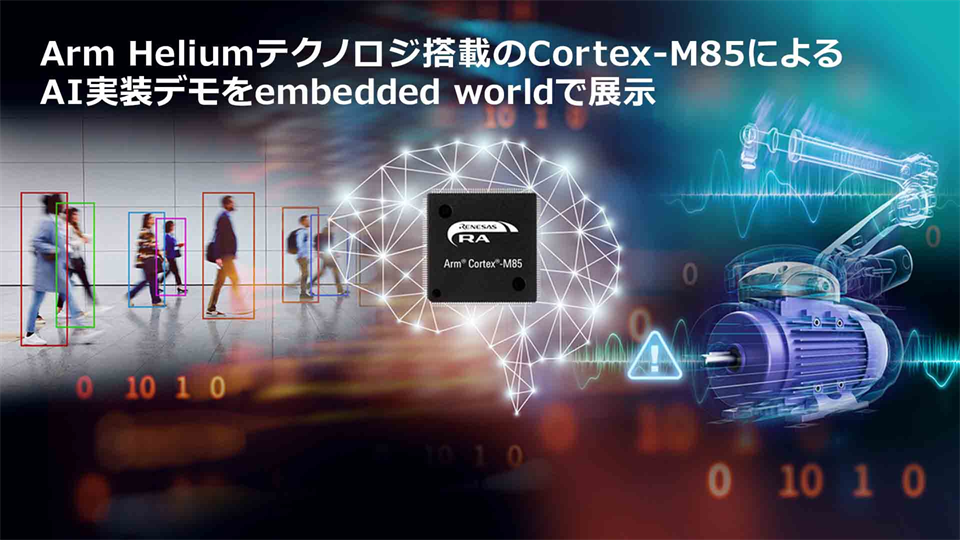
2023年3月14日~16日、ドイツ開催embedded world 2023で、ルネサスは、Cortex-M85コア搭載のRAファミリへAI処理を実装し、人物検出へ適用したデモを行いました。
従来、人物検出アルゴリズム実行には、Cortex-M7クラスMPU(Micro Processor Unit)が必要でした。このCortex-M85搭載RAファミリにより初めてMCUでもAI処理可能となり、MPU比、低コストで低消費電力動作など革命が起こるそうです。
このCortex-M85搭載RA MCUは、2023年中にリリース予定です。
SDR搭載RAファミリサンプル出荷
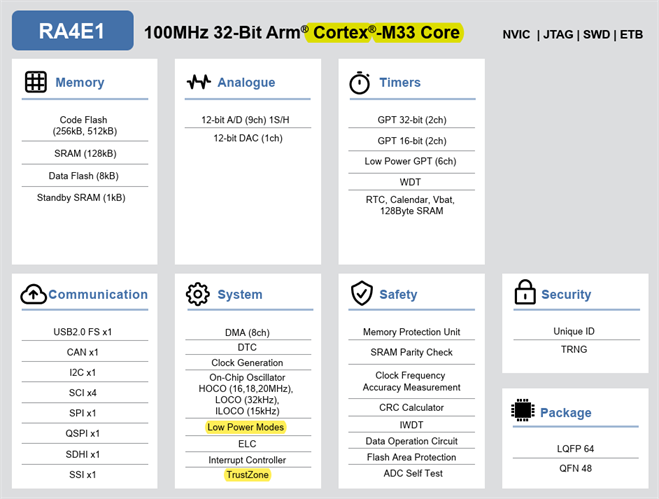
SDR(Software Defined Radio)は、ソフトウェアにより無線機能の変更が可能なハードウェアのことです。Cortex-M33コアRAファミリに搭載するSDRは、Bluetooth 5.3 Low Energyまでの各種Bluetooth仕様に対応しました。
つまり、ソフトウェアを更新すれば、常に最新バージョンBluetooth準拠のMCUになる訳です。2023年4月11日、このRA MCUのサンプル出荷が始まりました。
SDR搭載RA MCUは、ルネサス初の22nm製造プロセスMCUです。但し、22nmロジックとは異なる製造プロセスの不揮発性メモリを混載封止したSIP(System In Package)版MCUです。
不揮発性メモリまで同一の22nmで製造し、さらに高速で製造原価を下げたMCUの提供時期は、未定です。SIP版で機能優先のサンプル出荷を開始したのでしょう。
RAファミリへ最新技術を適用する理由
これら最新技術は、従来のMCUファミリには搭載しづらいです。その理由が以下です。
先ずハードウェア的には、最新技術が22nmなど先端MCU製造プロセスをベースにしていること、また、IoT向きCortex-M33/M85コアのRAファミリの方が、従来コアへ最新技術を追加するより性能的にも導入し易いこと、などです。
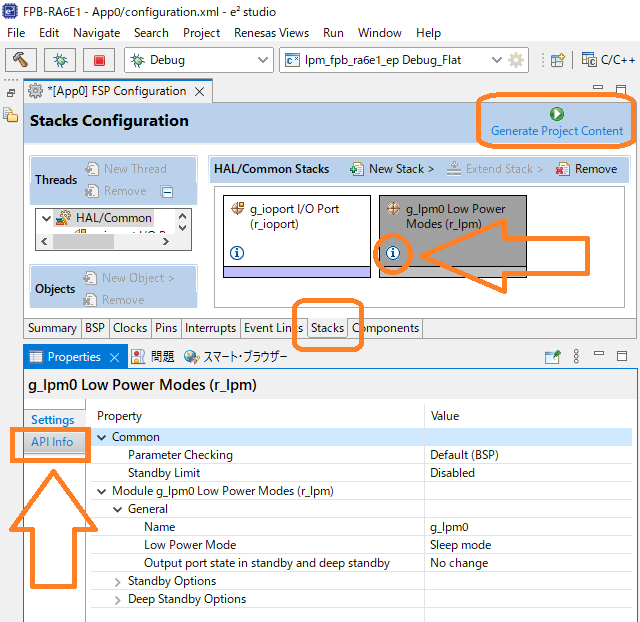
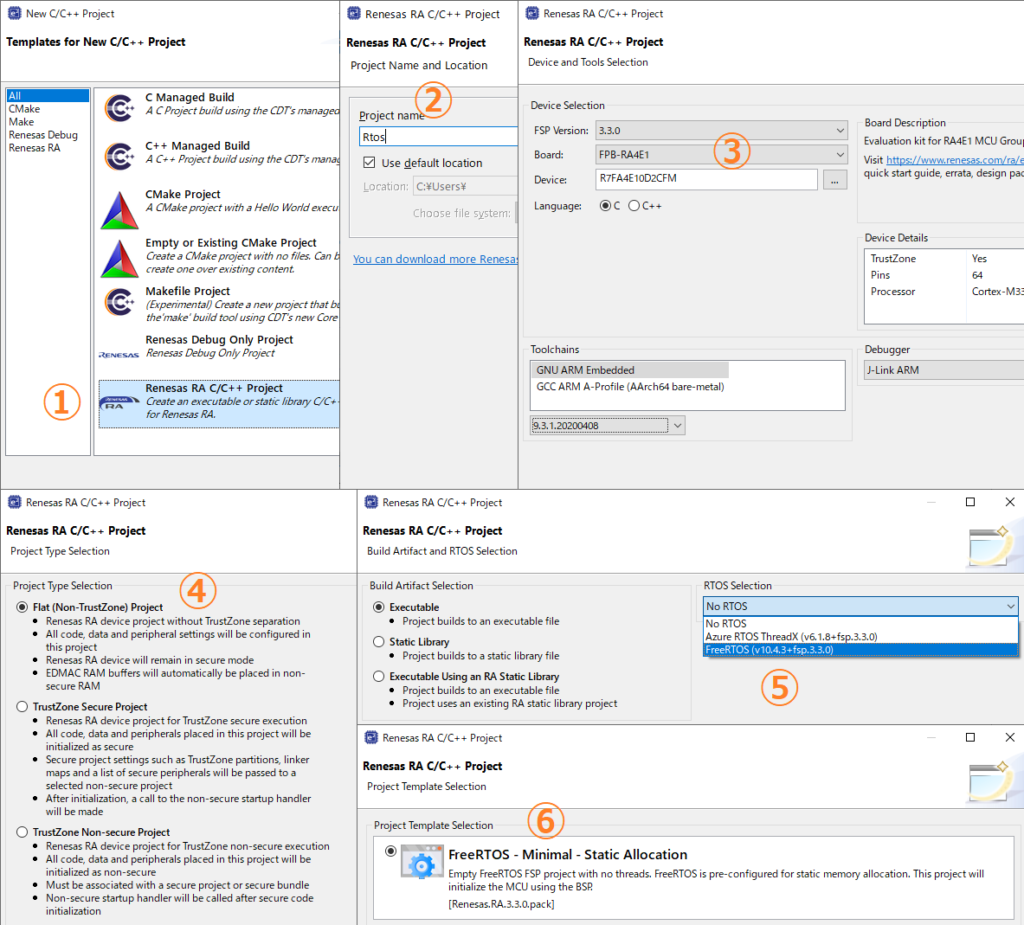
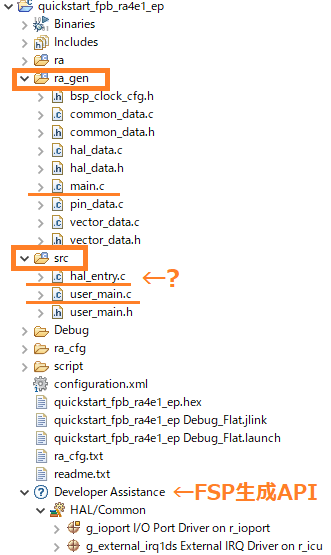
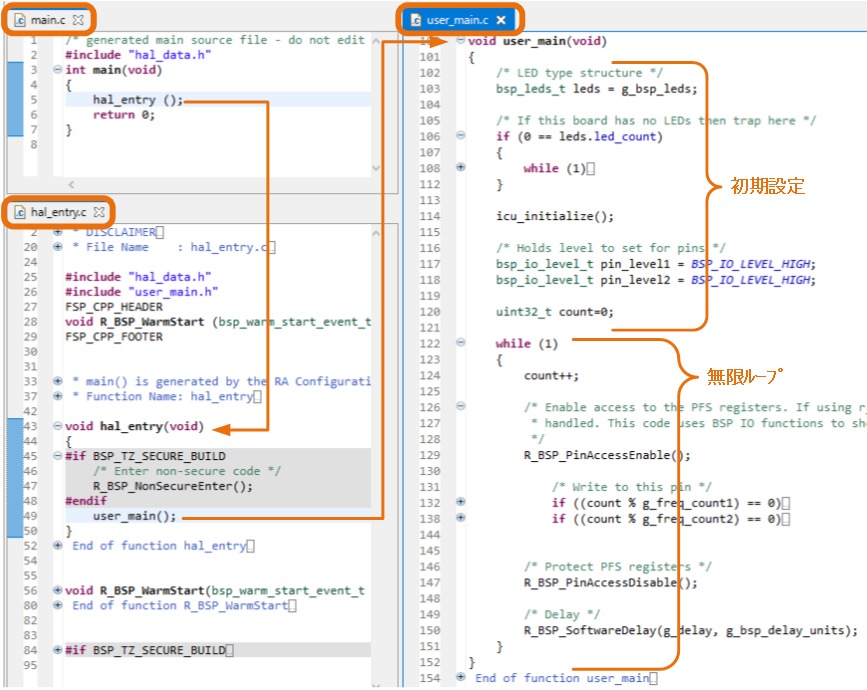
次にソフトウェア的には、RAファミリが、新しいFSP(Flexible Software Package)で開発することも一因です。簡単に言うと、FSPはAPI生成ツールです(関連投稿:MCUベンダAPI生成ツール比較2020年版)。
IoT MCU製品は、従来のベアメタルソフトウェア開発へ、RTOSや通信、セキュリティなど様々な機能が追加されます。
これら追加機能は、製品毎に適用が大きく変わる可能性が高く、その変更に対し開発ソフトウェア流用性や、柔軟かつ素早い対応も求められます(前章SDR搭載RA MCUが一例)。
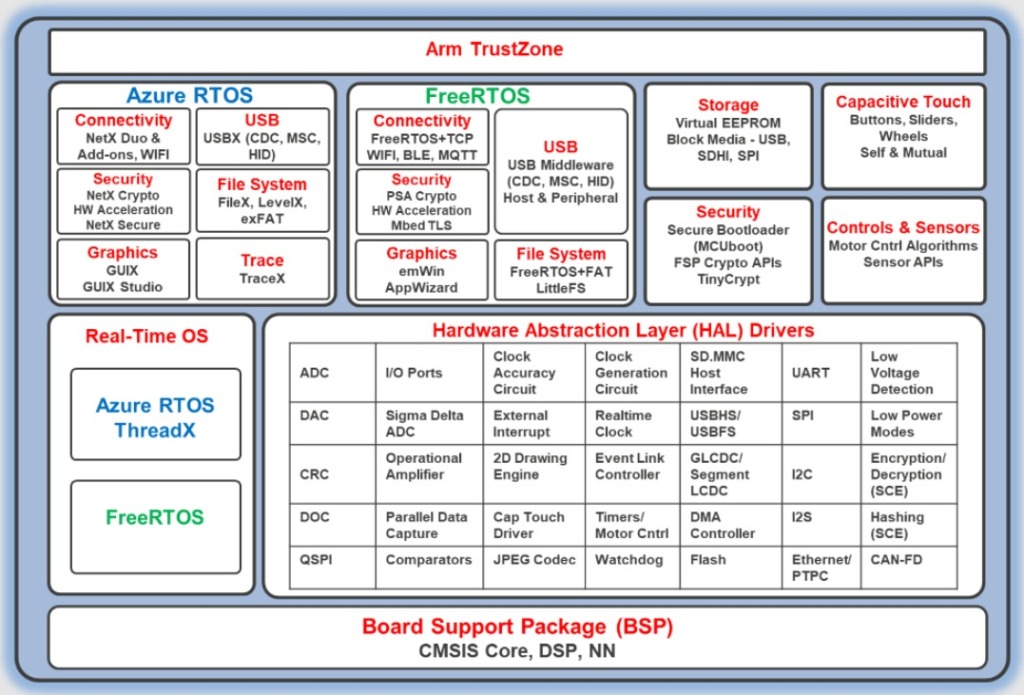
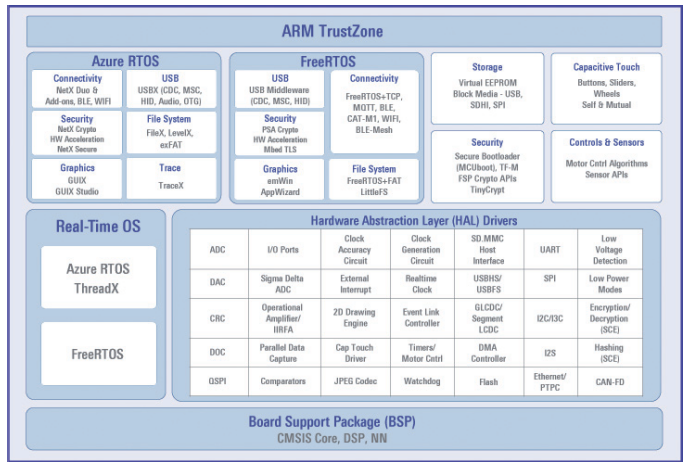
FSPは、BSP(Board Support Package)やHAL(Hardware Abstraction Layer)を利用しMCU個別ハードウェア依存部分を隠ぺいしつつ、効率的かつ柔軟にソフトウェアの早期開発ができるよう工夫されています。
最新ルネサスMCUファミリソフトウェア開発の鍵FSP
つまり、ルネサス最新技術を活用したIoT MCU製品の早期開発には、FSPを上手く使えることが重要です。
FSPが扱うソフトウェアは、従来のベアメタル開発だけでなく、RTOS(Azure RTOS/FreeRTOS)や通信、各種USB、TrustZoneセキュリティなどと広範囲に及ぶため、FSP活用にはコツや慣れも必要です。
逆に、この鍵となるFSPを開発者が習得すれば、RAファミリに限らずルネサス最新IoT MCU製品化に、大きく貢献できる訳です。FSPは、RAファミリ以外のルネサスMCU開発へも適用されています。
まとめ
最新技術搭載のルネサスRAファミリMCUは、今後急速に増えます。最新RAソフトウェア開発の鍵:FSPを習得し、ベアメタル/IoT MCUソフトウェア開発に貢献できるようスキルを磨きましょう。
FSP習得方法
弊社RAベアメタルテンプレート(1000円税込)は、効率的かつ効果的にFSP習得ができます。将来的には、RTOSへも対応したRA RTOSテンプレート(仮名)も開発予定です。
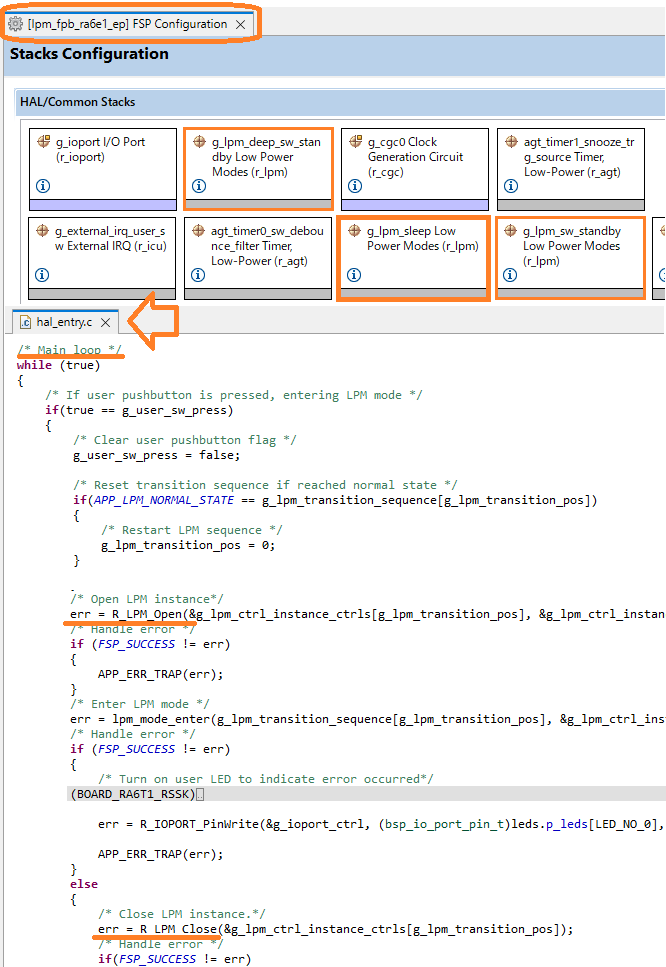
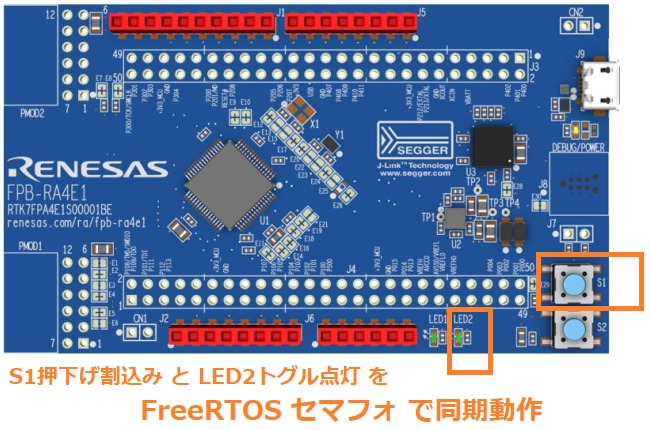
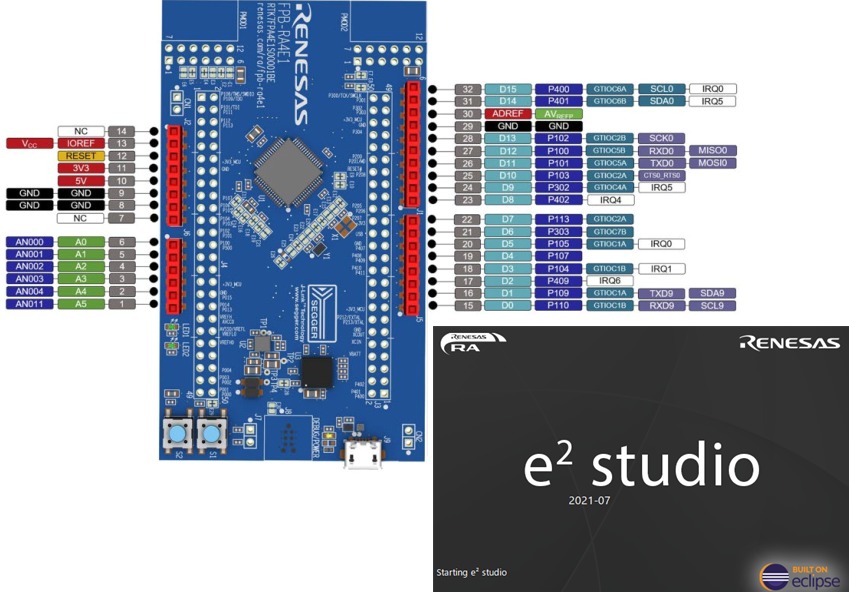
判り易い添付資料と低価格で入手性が良いFPB-RA6E1、または、FPB-RA4E1評価ボードと、Baseboardを利用すれば、どなたでもFSP提供サンプルコードを活用、流用したRAベアメタル開発が可能で、FSP利用のコツも掴めます。是非、ご活用ください。
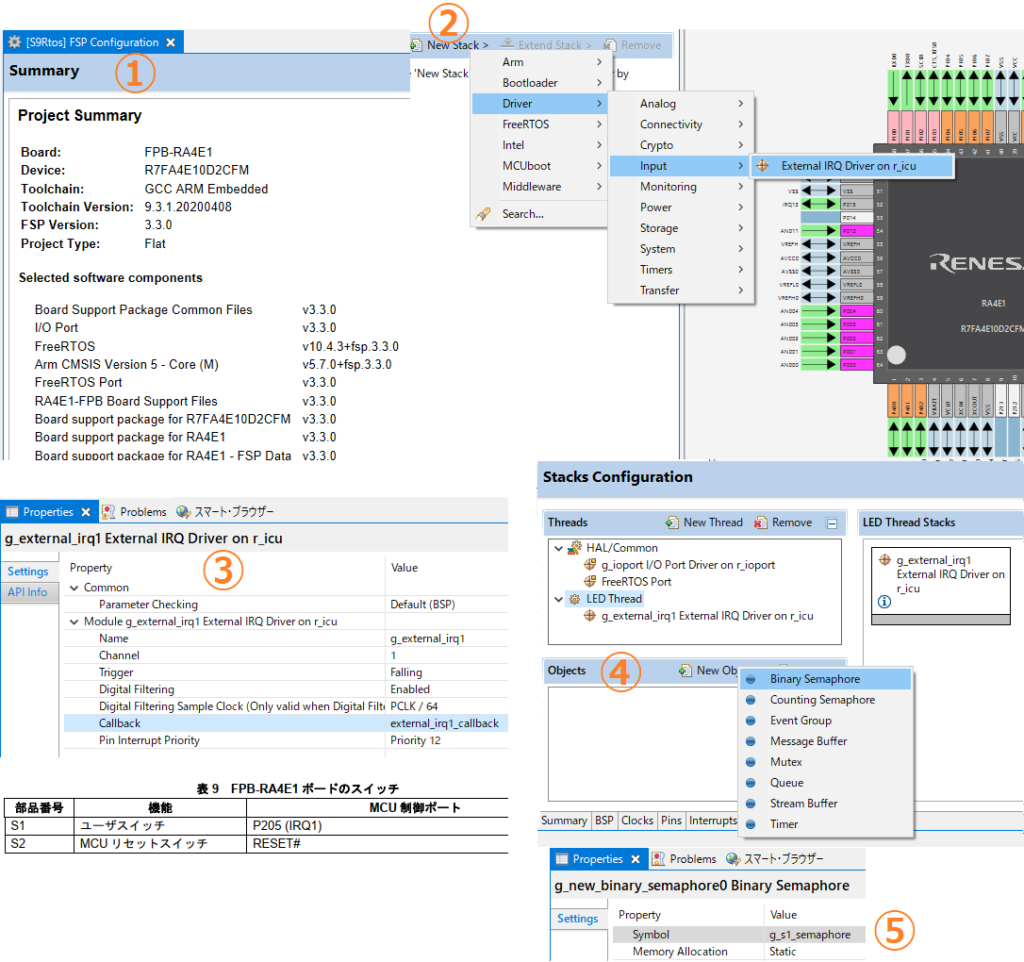
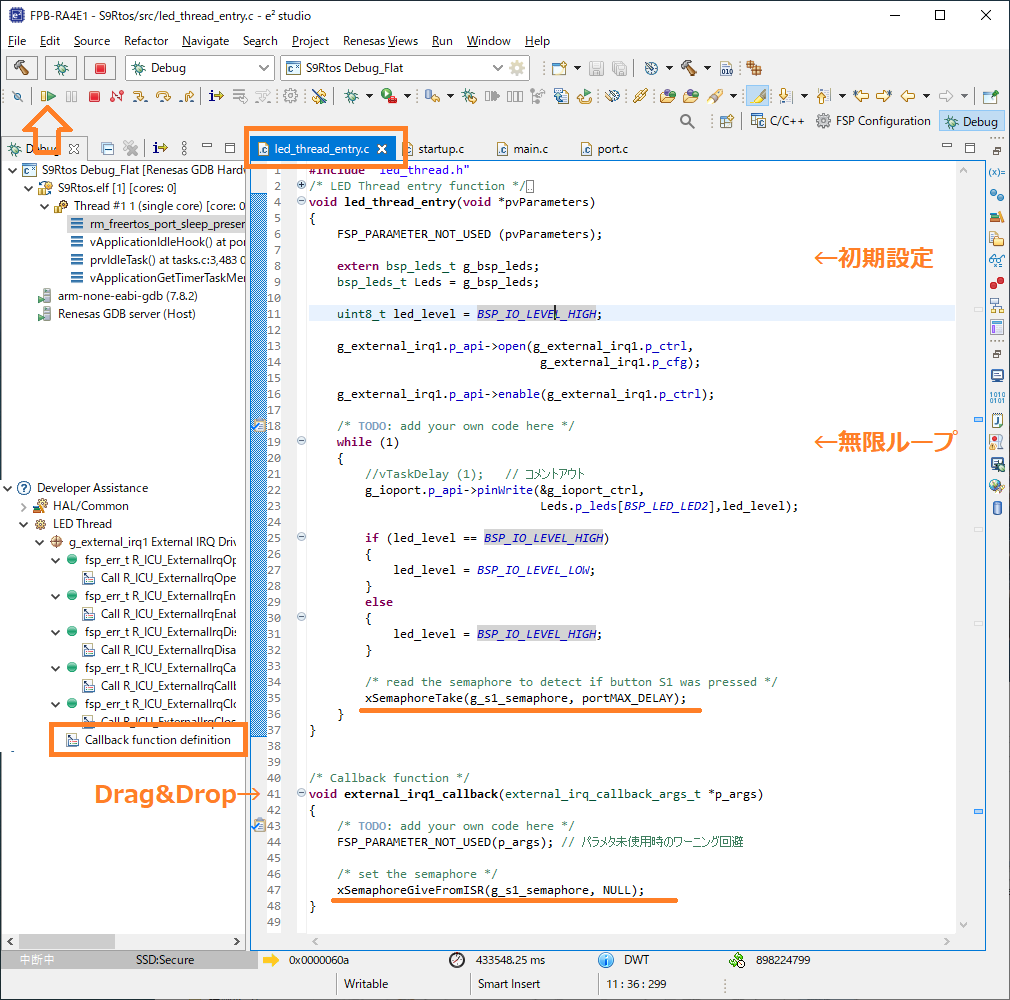
Tips)最新FSP v4.3.0でも、RTOS開発に100%対応はしていません。例えば、Developer Assistanceは、ベアメタルHAL callback関数定義はできますが、FreeRTOS callback関数定義はできません。
今後のFSP改版で、RTOSへの対応も広がるでしょう。但し、FSP習得タイミングとしては、ベアメタル開発に完全対応済みの「今がチャンス」と言えます。