ブログ読者様のおかげで、不明だったFRDM評価ボードOpenSDAとMCUXpresso IDE間の接続トラブル解決方法が判明しました。本稿は、このOpenSDA接続トラブル解決方法と、昨今の激しいMCU開発環境変化への開発者対応私案を示します。
OpenSDA v1/v2差
前投稿当日、弊社ブログ読者様からFRDM評価ボードOpenSDA処理トラブル時のJ-Linkハードウェアデバッガによる解決方法と、その根拠となったNXP Communityリンク 、さらに、同様のトラブルを抱えた方々向けに、ご提供情報を弊社ブログで共有してくださいとのメールを頂きました。
この場を借りて御礼申し上げます。ありがとうございます。
ご提供情報を基に、FRDM評価ボードOpenSDA v1/v2の差をまとめたのが、下表です。
OpenSDA v1/v2とFRDM評価ボードのまとめ
OpenSDA版数
評価ボード例
開発者
トラブル状況
トラブル解決方法
OpenSDA v1.0
FRDM-KE02Z40M
P&E Micro社
(Proprietary)
弊社あり
OpenSDA処理MCUをハードウェアデバッガで書換えれば解決の可能性あり
FRDM-KL25Z
弊社なし
OpenSDA v2.0
FRDM-K64F
ARM/mbed.org
(Open source)
Community内あり
OpenSDA処理MCUをハードウェアデバッガ:SEGGER J-Linkなどで書換えて解決(情報提供者様の解決実績あり)
OpenSDA v2.1以上
FRDM-K22F
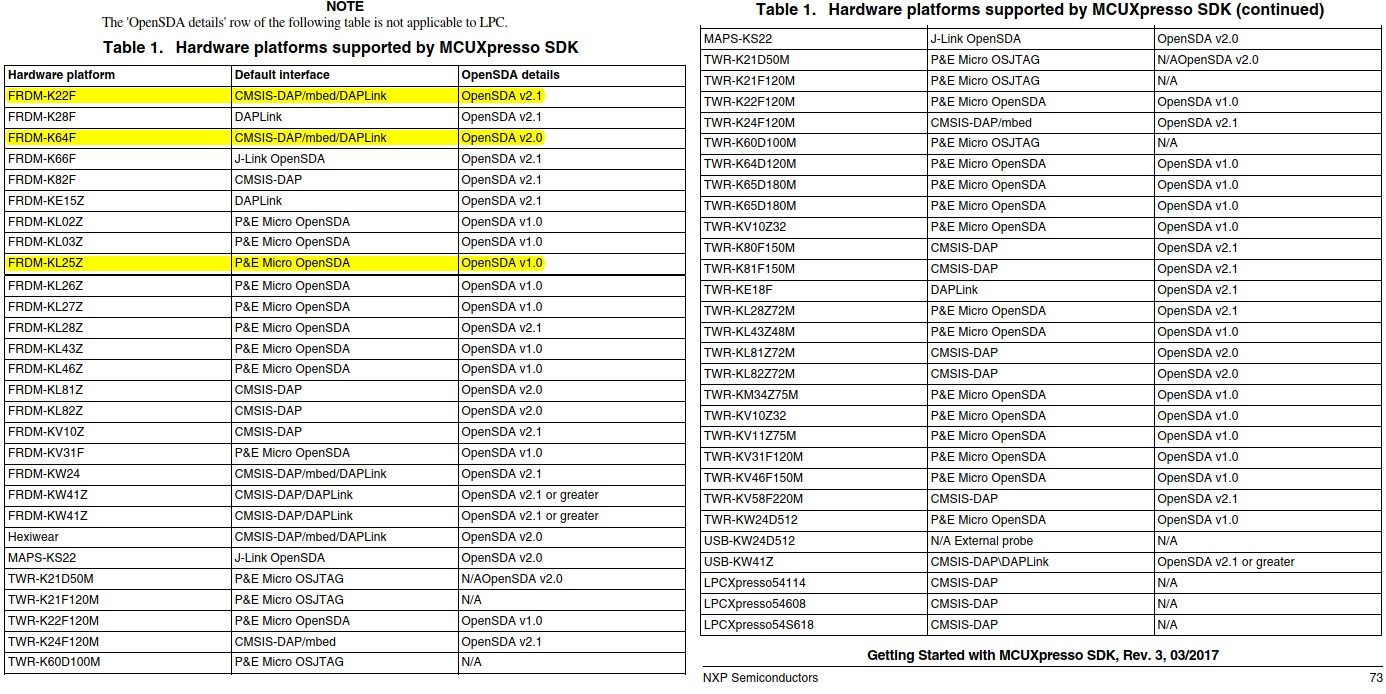
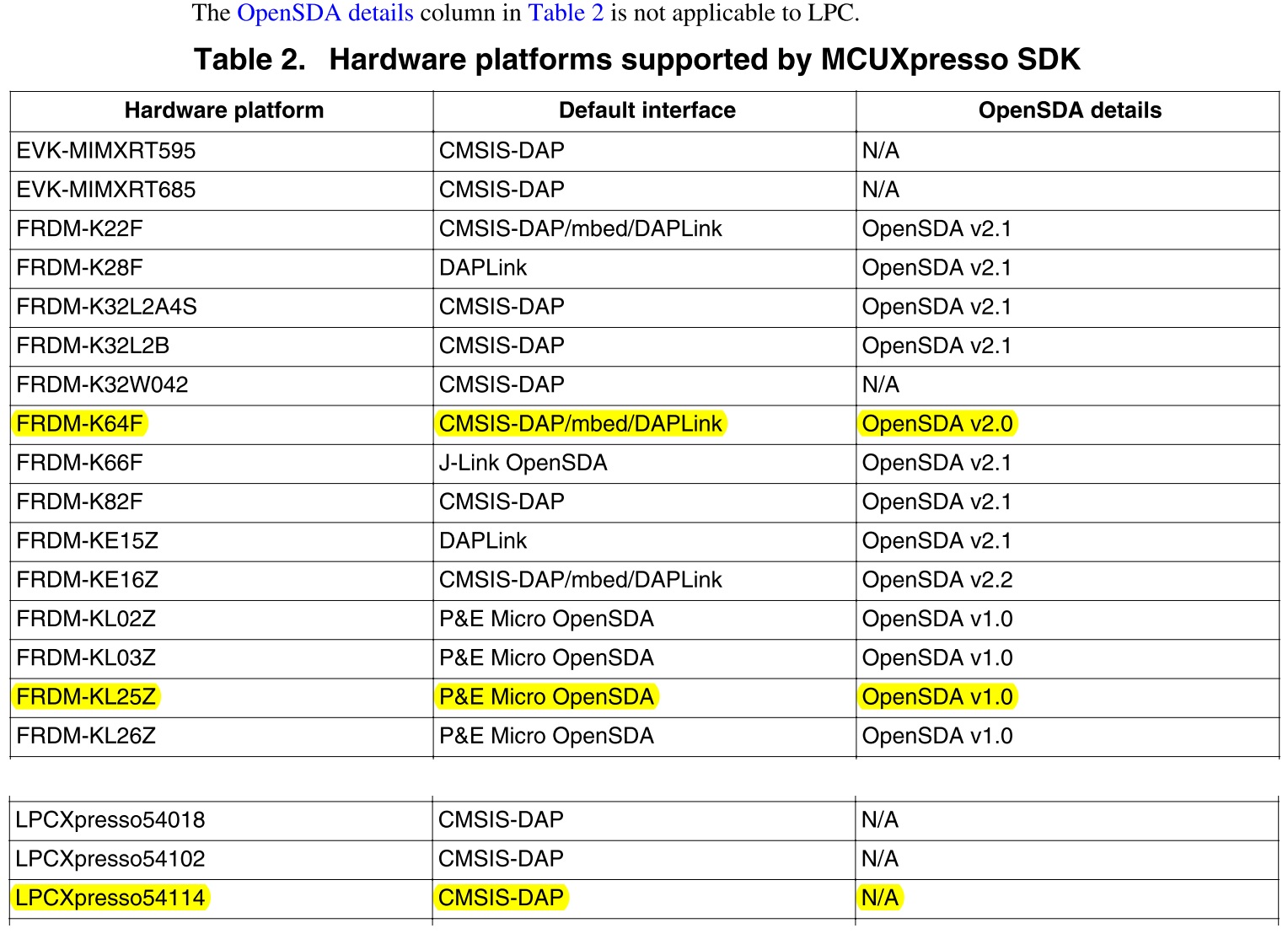
OpenSDAにはv1系とv2系があり、v1.0は開発会社:P&E MicroのProprietary製品 、v2系はARM/mbed.org開発のオープンソース です。また、新しいFRDM評価ボードの多くはv2.1以上を搭載済みで、v1.0やv2.0は古くからあるFRDM-K64Fなどです(Getting Start with MCUXpresso SDK, Rev.3, 03/2017のTable 1掲載ボードでの比較。この表になぜかFRDM-KE02Z40Mの記載はありません)。
Getting Start with MCUXpresso SDK Rev. 3 03-2017のTable 1 OpenSDA接続トラブル解決方法
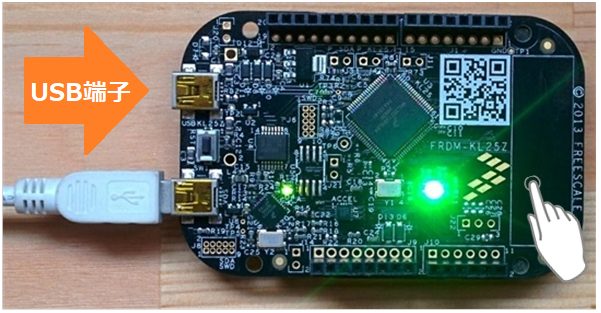
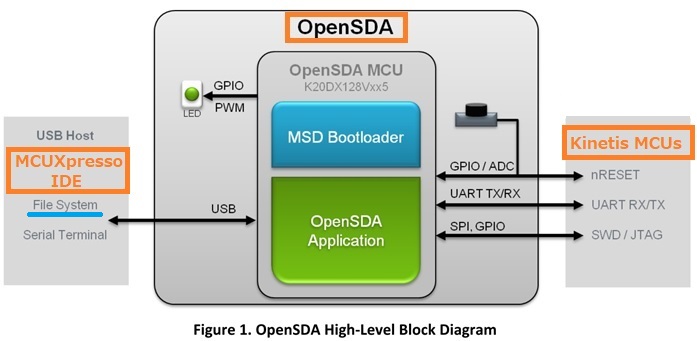
OpenSDA v2系のブートローダ更新失敗などにより生じたMCUXpresso IDE接続トラブルは、SEGGER J-Link などのハードウェアデバッガを使って、OpenSDA処理MCU:Kinetis K20(Cortex-M4)を、評価ボードのJ-TAGコネクタ経由でユーザが直接再プログラミングすれば解決します。再プログラミング用コードも、オープンソースです(情報提供者様の解決実績もあります)。
しかし残念ながら、弊社トラブル中のFRDM-KE02Z40Mは、OpenSDA v1.0です。OpenSDA 1.0は、処理ソフトウェアがProprietary(非オープンソース)ですので、この処理部分のユーザによる再プログラミングが可能かはCase-by-caseです。
通常Proprietaryソフトウェアは、下記理由で再プログラミングができない場合が多いと思います。
理由:前稿で示したユーザ(筆者)が、Windows 10ストレージサービスを一時停止しなかったブートローダ更新は、MCU側にとってはProprietary処理ソフトウェアの悪意侵害と判断される可能性があります。
※USB経由で行うブートローダ更新と、J-TAG経由のOpenSDA処理MCUソフトウェア書換えは、別物であることに注意してください。
FRDM-KE02Z40M Proprietary OpenSDA v1.0再プログラミングは、トラブル実機で試す必要があります。Proprietaryソフトウェアのため、書換え障壁はオープンソースOpenSDA v2系よりも当然高いと思われます。
J-TAGハードウェアデバッガメリット
評価ボードOpenSDA v1.0再プログラミングに必要となるJ-TAGハードウェアデバッガ価格は、例えばSEGGER J-Linkなら最低€300から、円換算で約¥37,000(2020年7月)からです。
同じ金額で10枚程度の最新MCU評価ボードが購入できるので、個人レベルのJ-TAGハードウェアデバッガ購入は勇気がいります。
J-TAGハードウェアデバッガのメリットは、旧Freescale)Bertrand Deleris氏の組込み向けデバッグ技術の基本 (2007年3月:EDN)が良く解ります。マルチコアMCUデバッグや、ハードウェア/ソフトウェアブレークポイント差、セキュリティとDebug/Releaseの関係など参考になりますので、一読をお勧めします。
半導体ライフサイクルとMCU開発者対応私案
半導体製品のライフサイクルと製造中止(EOL)対策 (2020年7月、EE Times)によると、多くの半導体製品の平均寿命は、3~5年だそうです。
MCUベンダ各社は、10~15年の安定供給を保証しますが、製品搭載済みMCUの賞味期限は、我々開発者が製品化に1年要したとして、発売後5年程度だと個人的には思います。
※MCU賞味期限≒MCUの差別化特徴を活かした製品が競合他社より優位な期間。IoTセキュリティ、AI機能実装や製造プロセス細分化など今後MCUは激変するハズなので、より短くなると思います。
丁度、新車購入後、2回目の車検(3年+2年=5年)で名目上の減価償却する自動車と同程度です。
COVID-19の影響で少し鈍る可能性もありますが、ADAS(先進運転支援システム)が引っ張る自動車と同様、“MCU製品も5年目安で世代交代を考えるべきだ”と思います。
また、「日本製品」が海外で売れなくなった根本原因 (2020年7月、東洋経済オンライン)を読むと、「加点型の完璧主義」の世界基準に対して、日本人の「盆栽のような減点型のミニマムな完璧ものづくり」が日本敗因の1つです。プラス側メリットやそれに費やした見えない労力などは無視する一方、マイナス側の過度な批判は、日本特有かもしれません。
“基準を減点型→加点型へ180度変える努力が日本は必要”になりそうです。
MCU開発環境は、PC OSも含めて常に変化・進化します。そして、それらの環境変化は全て世界基準です。
MCUXpresso IDE は、7月9日にv11.2.0へ、MCUXpresso SDK の多くは、7月19日にv2.8.0へ更新されました。次々に生まれる新MCUや環境変化に対応するためですが、逆にこれら変化・進化に馴染まない従来MCUや減点型対応者も生じます。これらは、徐々に進化と逆らい「ガラパゴス化 」している訳です。
MCU開発者は、変化・進化する環境に対して、開発中、または顧客稼働中のMCUが進化に馴染まなくなる兆候・前兆を素早く捉え、最終利用者と協議の上、従来から180度変えた“加点型対応策を取ることが、ワールドワイドなMCU開発者との競争に生き残り、その結果、日本製品も生き残れる方法”だと思います。
ガラパゴス化が全て悪い訳ではありません。しかし、日本MCU開発者がガラパゴス化すれば、その生存確率は確実に下がります。
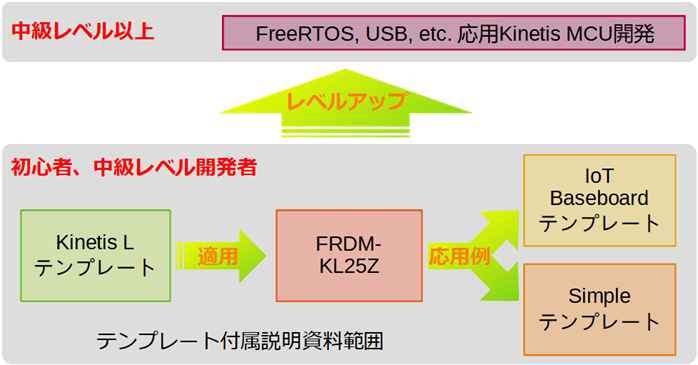
まとめ、新開発汎用Kinetis Lテンプレート
これまでの章内容をまとめます。
壊れたFRDM-KE02Z40のOpenSDA v1.0 Proprietary再プログラミングには、J-TAGハードウェアデバッガ:37,000円が必要で、OpenSDA v2系とは異なるProprietaryソフトウェアのため、書換え可能かはトラブル実機検証が必須。
J-TAGハードウェアデバッガは、MCUコア/ベンダに依存しない強力デバッグツール。
激変MCU環境に対して、加点型へ進化しないと日本MCU開発者はガラパゴス化する。
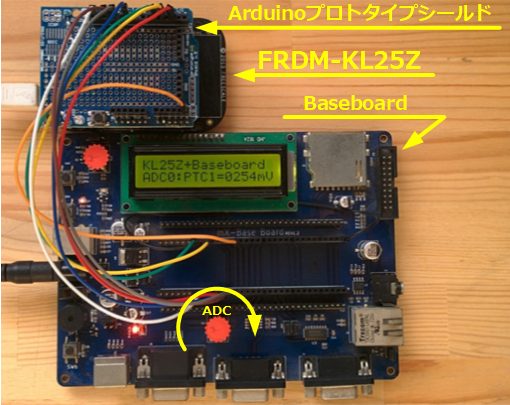
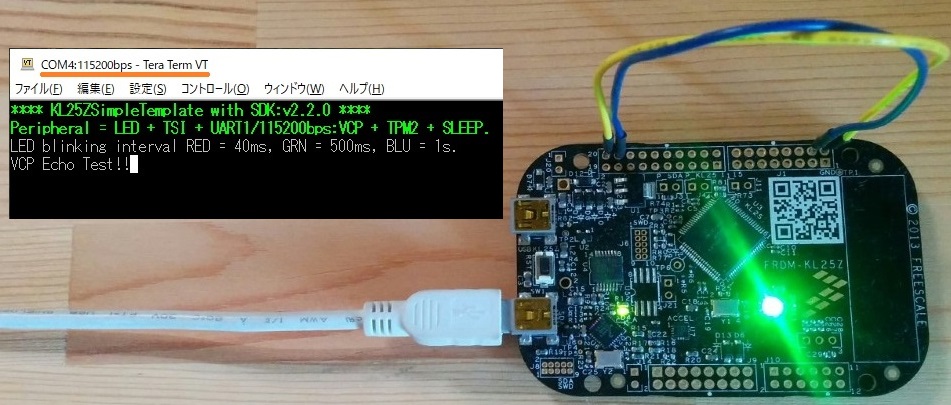
これらから、FRDM-KE02Z40(Cortex-M0+/40MHz、5V Robust)のOpenSDA v1.0 Proprietary再プログラミングはあきらめ、5V耐圧が特徴であるKinetis Eテンプレートv2改版開発は中止、新たにFRDM-KL25Z(Cortex-M0+/48MHz、General Purpose = Main Stream)を用いた汎用Kinetis Lテンプレート開発に着手しようと考えております。
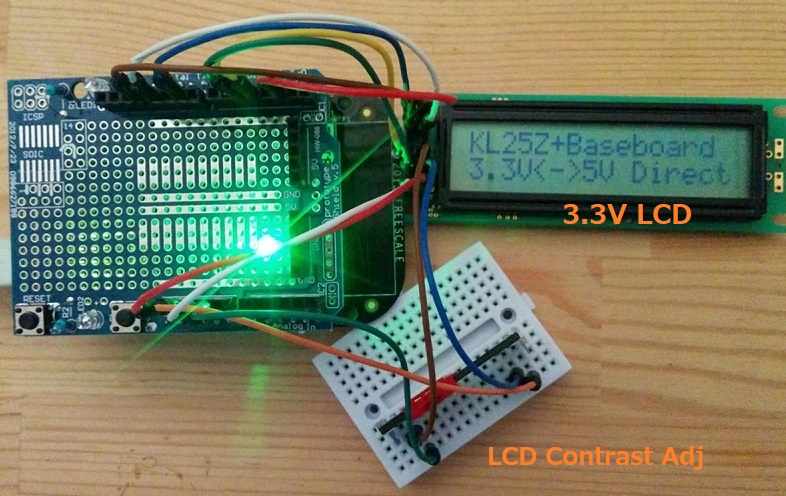
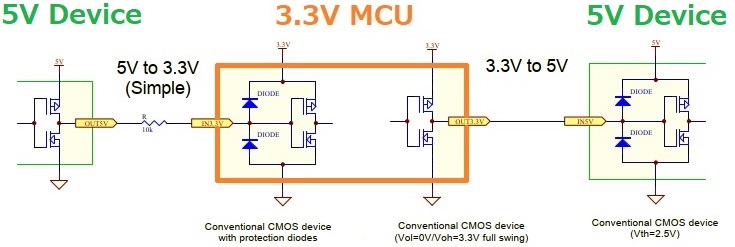
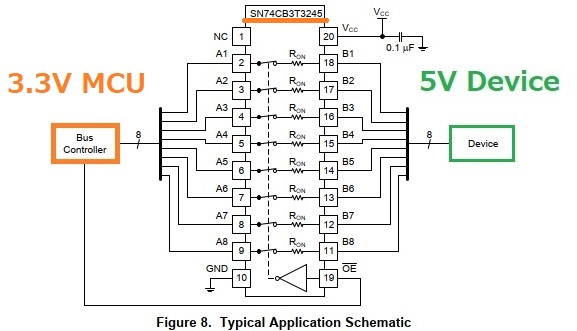
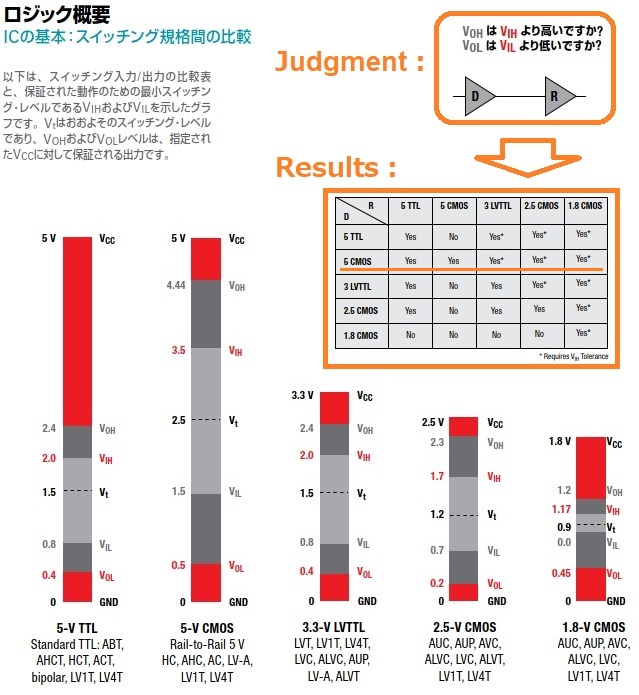
5V耐圧の代案は、一般的になってきたレベルシフタを用いる方法でKinetis Eテンプレートの最終利用者様への対応をお願いいたします(関連投稿:MCUの5V耐圧ピン を参考にしてください)。
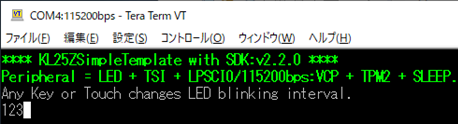
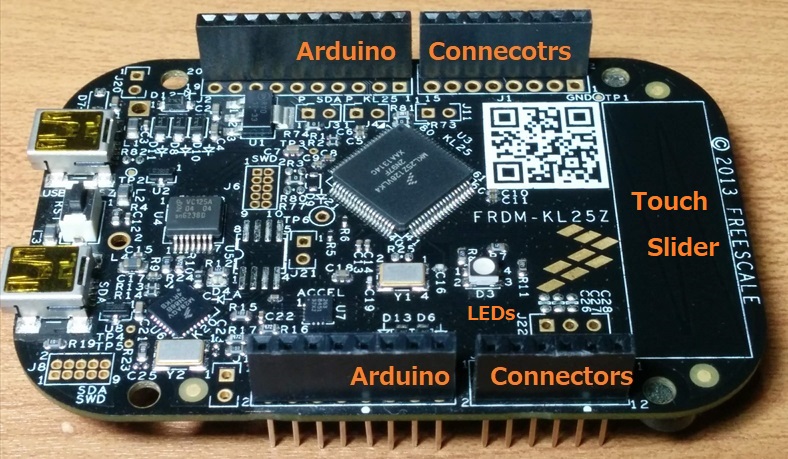
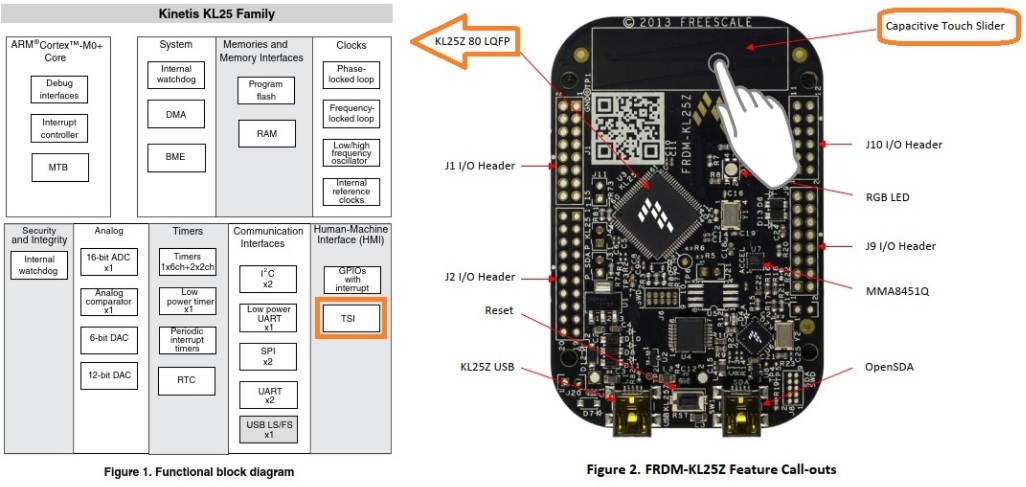
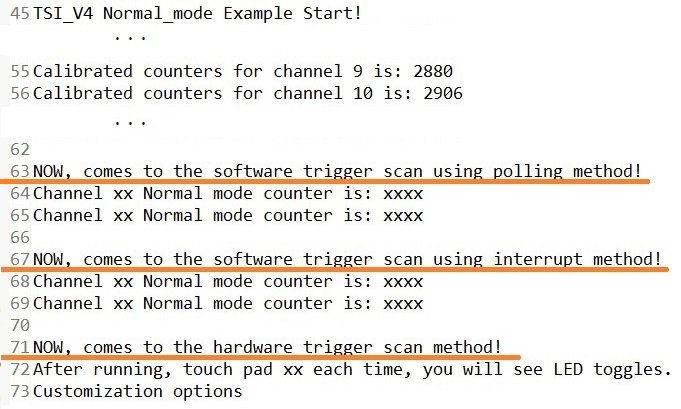
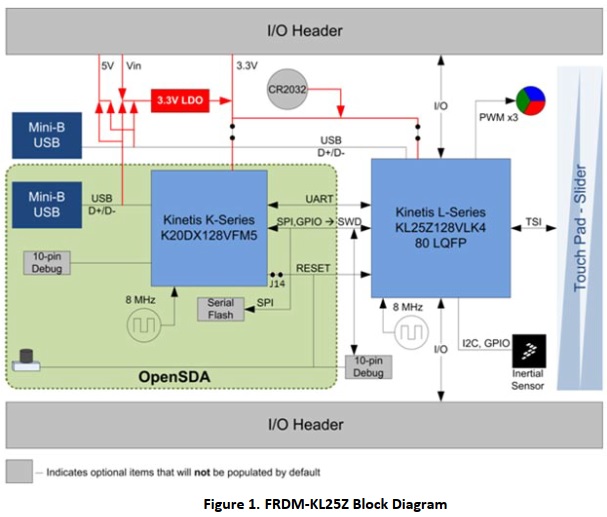
5V耐圧を失う代わりに、FRDM-KE02Z40Mでは実装していましたが動作しないTouch pad (Slider)が、FRDM-KL25Zでは動作します。Touch pad (Slider)動作には、MCU内蔵Touch Sense Input:TSIハードウェアが必須です。FRDM-KE02Z40Mは内蔵されていません。TSIライブラリソフトウェアのみでは動作しないことは、2015年開発のKinetis Eテンプレート v1で確認済みです。
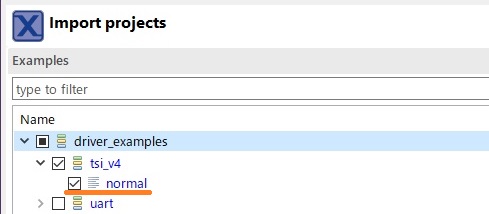
新開発の汎用Kinetis Lテンプレートは、このFRDM-KL25Z内蔵TSIハードウェアとライブラリ使いTouch pad (Slider)を、外付けSW入力の代わりに用います。
FRDM-KL25Z Block Diagram(出典:ユーザズマニュアル) ※FRDM-KL25Z搭載のMCU:MKL25Z128VLK4 (Cortex-M0+/48MHz、Flash:128KB、RAM:16KB、66:IOs)は最新MCUとは言えませんが、「低価格、入手性良し、汎用性(Main Stream)、応用範囲の広さ、OpenSDAトラブル無し」が、新規汎用テンプレート開発採用にプラスに働きました。
さいごに
多彩な情報満載のCommunityですが、逆に欲しい答え発見までにかなりの時間・労力がかかるのもCommunityです。
ブログ読者様ご提供Communityリンクのおかげで、短期間で効率的に問題解決法を見つけることができ、さらにJ-TAGハードウェアデバッガなどの関連情報収集、現状テンプレート開発見直しもできました。
ここにあらためて心より感謝いたします。ありがとうございました。