STマイクロエレクトロニクス2021年2月25日発表の先端性能と超低消費電力動作両立のSTM32U5を紹介し、STのIoT MCU開発動向をセキュリティ、MCUコア、製造プロセスの観点から分析しました。
先端性能と超低消費電力動作のSTM32U5
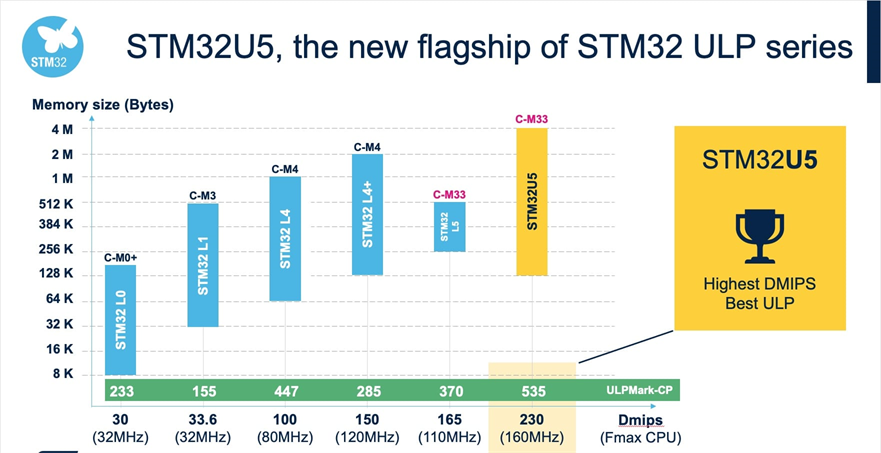
公式ブログから抜粋したSTM32U5のベンチマークです。従来の超低消費電力MCU:STM32L0~L4+シリーズと、Cortex-M33コア搭載STM32L5、今回発表のSTM32U5をメモリサイズとパフォーマンスで比較しています。
STM32U5は、従来Cortex-M0+/M3/M4比、Cortex-M33搭載により後述のセキュリティ先端性能と、従来Cortex-M33搭載STM32L5比、230DMIPS/160MHzと大幅向上した超低消費電力動作の両立が判ります。STM32U5の詳細はリンク先を参照ください。
本稿はこの最新STM32U5情報を基に、STのIoT MCU開発動向を、セキュリティ、MCUコア、製造プロセスの3つの観点から分析します。
セキュリティ
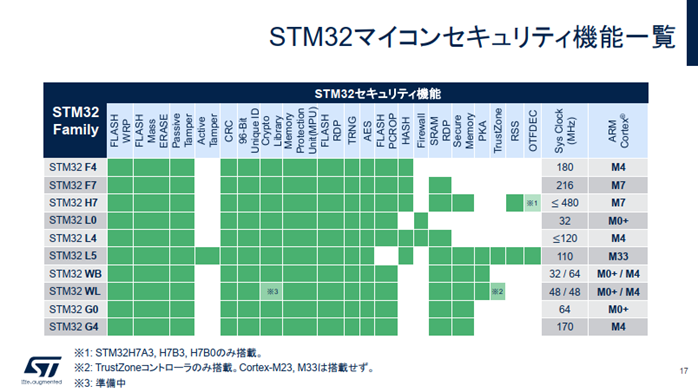
昨年10月27日ウェビナー資料:ARM TrustZone対応マイコンによるIoTセキュリティのP17に示されたSTM32マイコンセキュリティ機能一覧です。セキュリティ先端性能のTrustZoneは、Cortex-M33コアに実装されています。
関連投稿:Cortex-M33とCortex-M0+/M4の差分
今回の超低消費電力STM32U5発表前なのでSTM32L5のみ掲載されていますが、STM32U5もL5と同じセキュリティ機能です。STM32WLは、後述するワイヤレス(LoRaWAN対応)機能強化MCUです。
この表から、後述する最新メインストリーム(汎用)STM32G0/G4も、STM32U5/L5と同じセキュリティ機能を実装済みで、STM32U5との差分はTrustZone、PKA、RSSなど一部であることも判ります。
STM32U5のSTM32L5比大幅に動作周波数向上と低消費電力化が進んだ背景は、セキュリティ機能に対するより高い処理能力と40nm製造プロセスにあることが2月25日発表内容から判ります。
STM32ファミリMCUコア
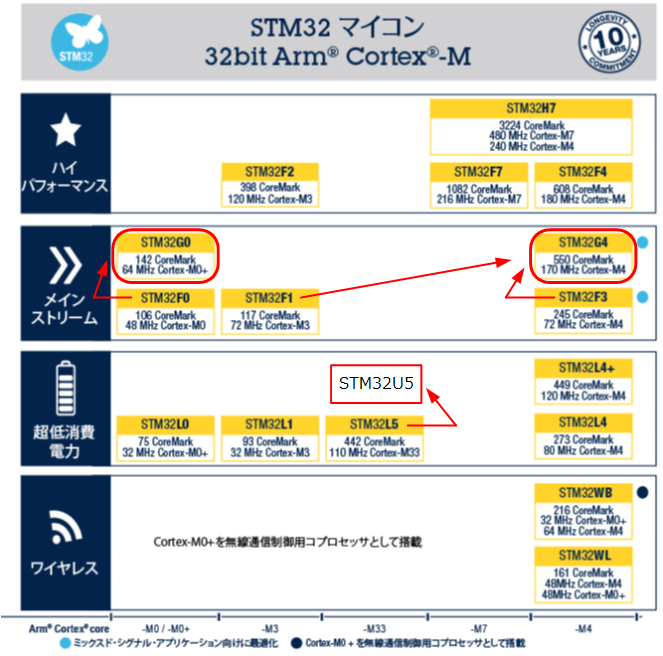
STM32ファミリMCUコアは、ハイパフォーマンス/メインストリーム(汎用)/超低消費電力/ワイヤレスの4つにカテゴライズされます。前章のSTM32WLがワイヤレス、STM32U5/L5は超低消費電力です(STM32U5は加筆)。
STM32WLとSTM32WBの詳細は、コチラの関連投稿をご覧ください。
STM32U5と同様、従来の120nmから70nmへ製造プロセスを微細化して性能向上した最新メインストリームが、STM32G0/G4です。
新しいSTM32G0/G4は、従来汎用STM32F0/F1/F3とソフトウェア互換性があり、設計年が新しいにも係わらずデバイス価格は同程度です。従来メインストリームのより高い処理能力と低電力動作の顧客ニーズが反映された結果が、最新メインストリームSTM32G0/G4と言えるでしょう。
製造プロセス
製造プロセスの微細化は、そのままの設計でも動作周波数向上と低電力消費、デバイス価格低減に大きく寄与します。そこで、微細化時には、急変するIoT顧客ニーズを満たす機能や性能を従来デバイスへ盛込んで新デバイスを再設計します。STM32U5やSTM32G0/G4がその例です。
MCU開発者は、従来デバイスで開発するよりも製造プロセスを微細化した最新デバイスで対応する方が、より簡単に顧客ニーズを満たせる訳です。
関連投稿:開発者向けMCU生産技術の現状
まとめ
セキュリティ、MCUコア、製造プロセスのそれぞれを進化させた最新のIoT MCUデバイスが、次々に発表されます。開発者には、使い慣れた従来デバイスに拘らず、顧客ニーズを反映した最新デバイスでの開発をお勧めします。
また、短時間で最新デバイスを活用し製品化する方法として、最新メインストリーム(汎用)デバイスSTM32G0/G4を使ったプロトタイプ開発もお勧めします。
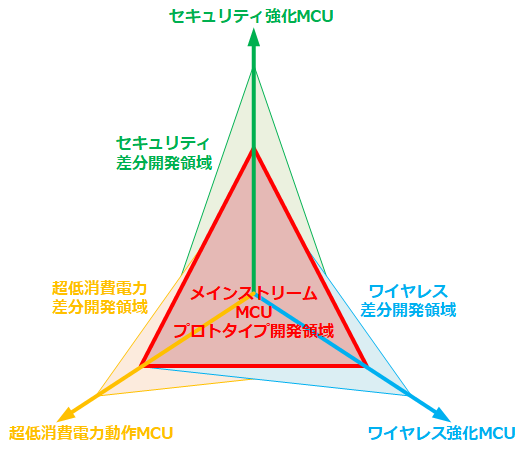
前章までで示したように最新メインストリームSTM32G0/G4は、他カテゴリデバイスの機能・性能を広くカバーしています。メインストリームプロトタイプ開発資産は、そのまま最新の他カテゴリデバイスへも流用できます。
従って、他カテゴリデバイスの特徴部分(セキュリティ、超低消費電力動作やワイヤレス)のみに注力した差分開発ができ、結果として短期製品化ができる訳です。
ちなみに、プロトタイプ開発に適したSTM32G0テンプレートは、コチラで販売中、FreeRTOS対応のSTM32G4アプリケーションテンプレートは、6E目標に開発中です。
あとがき:文字伝達
ソフトウェア開発者ならソースコード、ハードウェア開発者なら回路図が、最も直接的・正確に技術内容を使える手段です。文字は、記述者の理解を変換して伝える間接的手段です。両者に違い(文字化ノイズ)が生じるのは、やむを得ないと思います。
“報ステのTSMCのニュースに頭の抱えてしまった”、“TSMCは日本で何をしようとしているのか“からも分かるように、マスメディアは文字や画像で情報を伝えます。受けての我々開発者は、これらノイズを含むと思われるマスメディア情報を、自分の頭で分析・処理し、理解する必要があります。
と言うわけで本稿も、筆者が文字化ノイズを付けて分析した例です……、という言い訳でした😅。