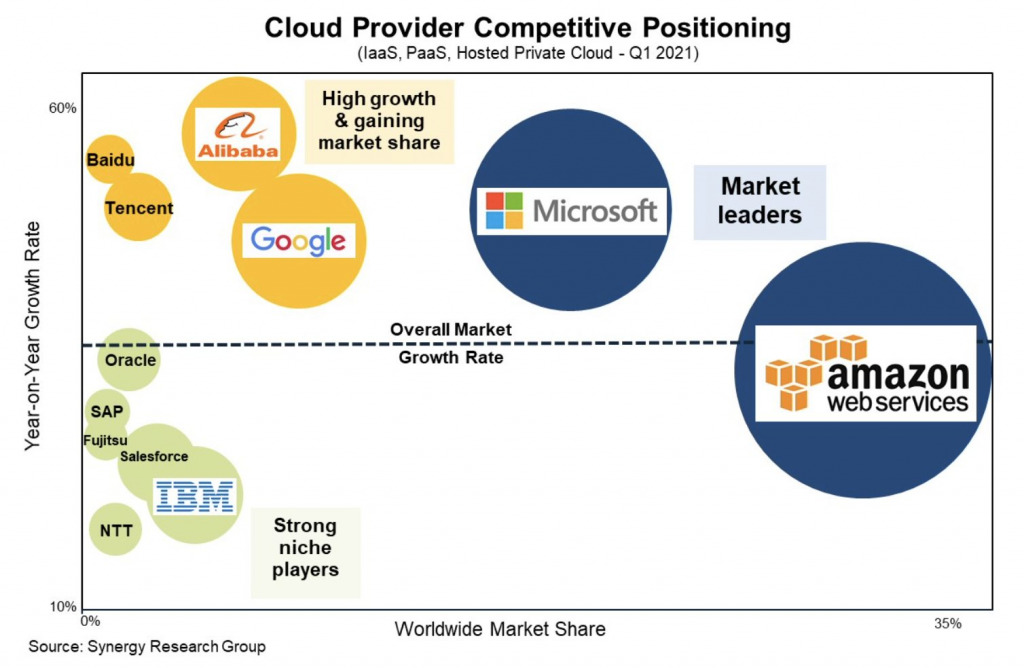
IoT MCUクラウド市場は、AWSとMicrosoft Azureがリードしており世界収益の半分以上を占めるという記事に掲載されたのが下図です(EE Times 2021年6月7日、横軸:市場シェア、縦軸:年平均成長率)。Microsoftは徐々にAmazonに迫っており、市場シェア差は、過去1年で2ポイント縮まったそうです。
多様化MCU RTOS
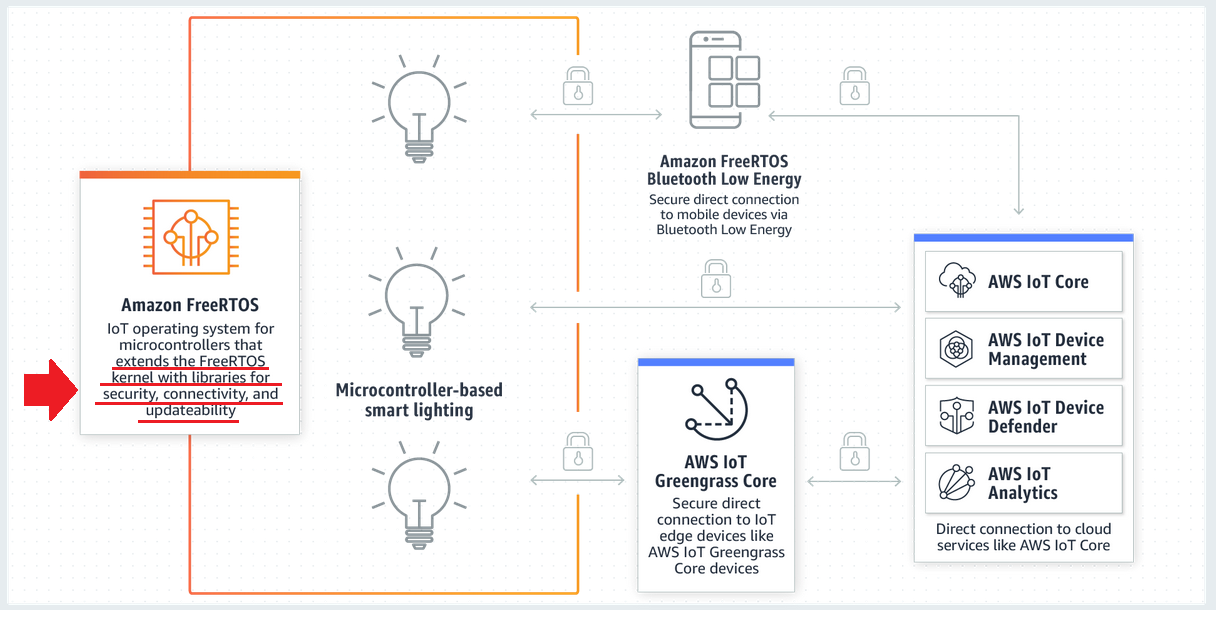
AWSへの接続にはAmazon FreeRTOS、Microsoft AzureにはAzure RTOSを用います。IoTクラウド接続ウェビナーでは、どのMCUベンダでも先行しているAmazon FreeRTOSを使った接続例が主流です。しかし、最近は、Azure RTOS利用の接続資料やウェビナーも見られます。AWSとMicrosoft Azureの差が縮まりつつある証左でしょう。
また、第3勢力として急成長中のGoogleクラウド接続にはARM mbed OSが使われます。IoT MCUに実装するRTOSは多様化してきました。
IoT MCU RTOSとPCブラウザ
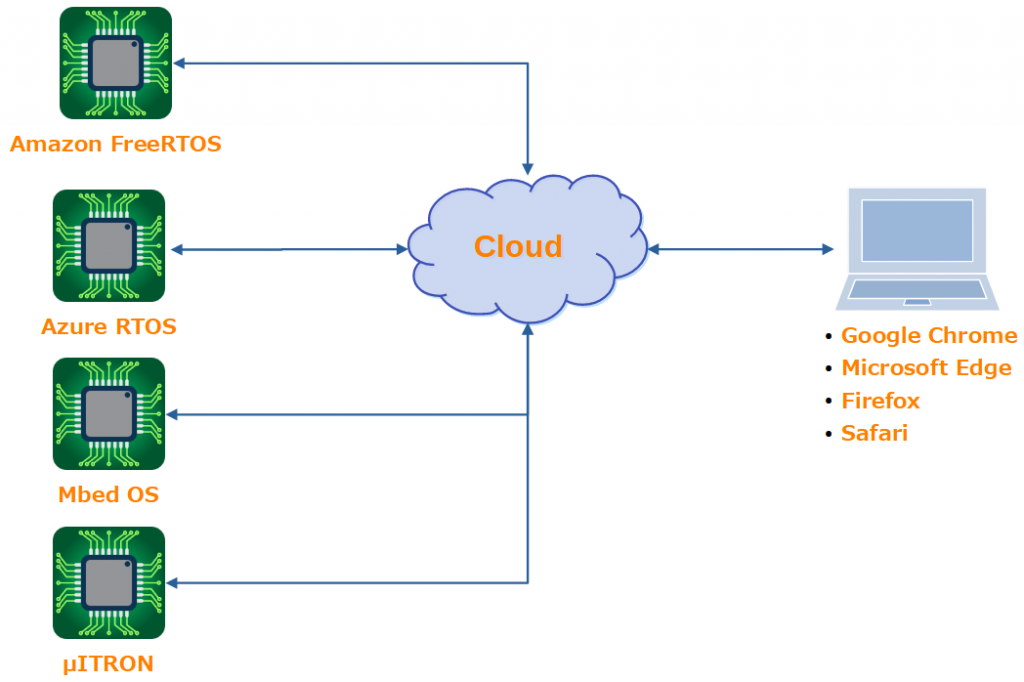
この状況は、PCブラウザが現状、複数共存しているのに似ています。
機能的には同じブラウザですが、表示/印刷/広告などの使い勝手が少しずつ異なるため、必要に応じて複数ブラウザを使い分ける方も多いでしょう。記憶容量の大きいPCでは、ブラウザ併用・共存も簡単です。
しかし、限られた容量しか持たないMCUの場合は、複数RTOSの中からMCU搭載RTOSは1つに絞られると思います。
例えば、AmazonやMicrosoft、Google各社の強み(販売/文書/広告)や特徴を活かし、IoT機器制御サービスやAI活用サービスなど魅力的クラウドサービスを各社各様で提供し、その価格、顧客との結びつきの強さなどがサービス選択の決め手となるでしょう。
いずれにせよ顧客が、利用するクラウドサービスを決め、その接続手段として各社RTOS接続ライブラリの使用、加えてRTOS環境での上層MCUソフトウェア開発を行うことになります。
問題は、RTOS環境のMCUソフトウェア開発手法がベアメタルと異なること、各社RTOS仕様が少しずつ異なることです。
多様化RTOS対策
仮に、Cortex-M4/M0+ディアルコアMCUで、クラウド通信処理全てを、Cortex-M0+コア側のRTOSライブラリで行い、通信とアプリケーションが完全分離された構成であれば、問題は解決します。接続サービス毎にRTOS通信ライブラリを変えさえすれば、対応できるからです。
BluetoothやThreadなど複数無線通信規格から1つを選んで処理するなど、この構成に近いベアメタルソフトウェア対応のMCUが既にあります。
しかし、主流ウェビナーで用いられる高性能Cortex-M4シングルコアを使って、クラウド通信とアプリケーションの両方を処理する場合には、接続先のクラウドに応じて「FreeRTOS/Azure RTOS/Mbed OSなど様々なRTOS環境の上層アプリケーション開発」になります。
RTOSの目的は、MCUハードウェア隠蔽と開発ソフトウェア流用性向上なのに、複数RTOS存在で開発アプリケーションが異なるとは、皮肉な結果です。
最初の図は、IoT MCU開発者が、今後急増するクラウド接続IoT MCU開発に、これら複数RTOSを効率的に習得し、かつ、顧客が選ぶ1個のRTOSアプリケーションを早期に開発できるスキルを獲得しなければならない現状や将来を示しているとも言えます。
こういう状況での常套手段は、共通部分と個別部分の分離、共通部分からの段階的習得です。
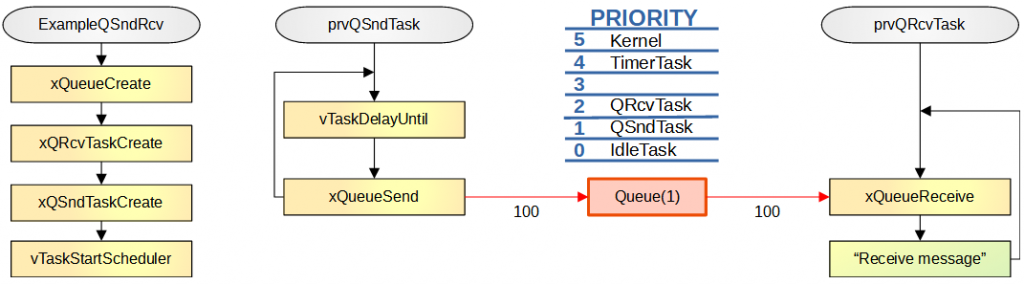
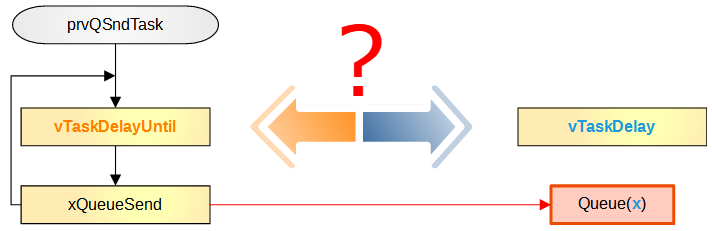
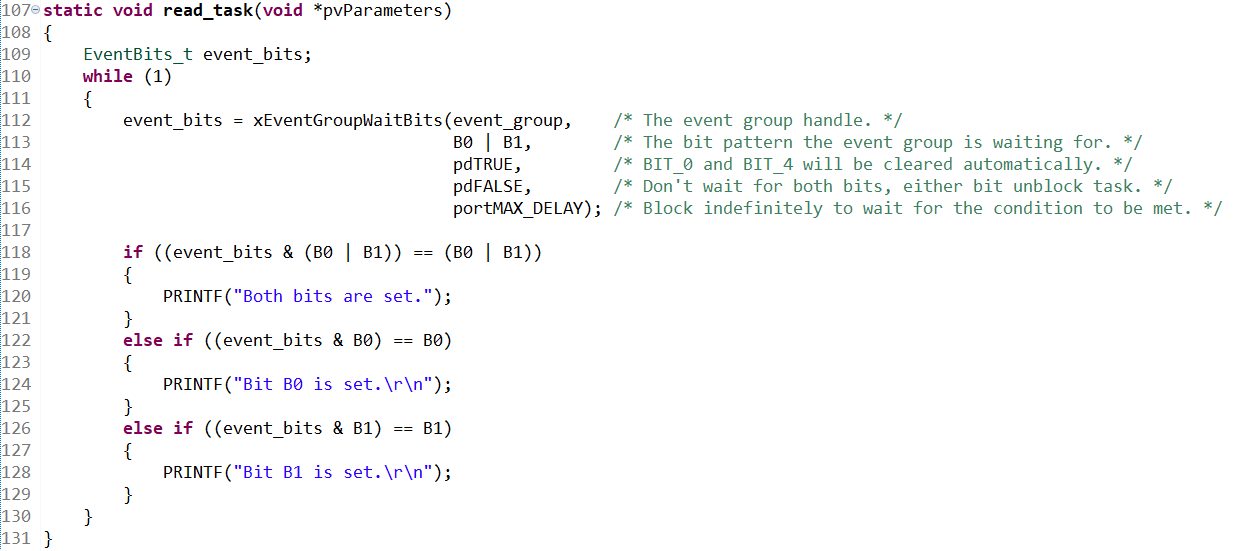
どのRTOSでもSemaphoreやQueueは、ほぼ共通の基本機能です。先ずは、この2機能をしっかり把握し、より高度なミューテックスやイベントグループなどRTOS毎に特徴があり機能も異なる対象へ発展するのが効率的でしょう。
※RTOSは、複数タスク(AzureはThread)を、優先順位に応じてリアルタイムに実行/待機/状態保存復帰の切替えを行います。タスク間同期手段がSemaphore、データ送受手段がQueueで、この2つはどのRTOSでも共通の基本機能です。
まとめ
IoT MCUクラウド市場シェアから、クラウド接続IoT MCU RTOSもPCブラウザ同様、様々な仕様併存の可能性があります。
顧客が選ぶRTOSに柔軟対応し、そのRTOS上層の様々なRTOSアプリケーションを早期開発するには、先ず、各RTOS共通機能のSemaphoreとQueueを把握し、より高度でRTOS毎に異なる個別機能へ発展する習得アプローチが効率的です。
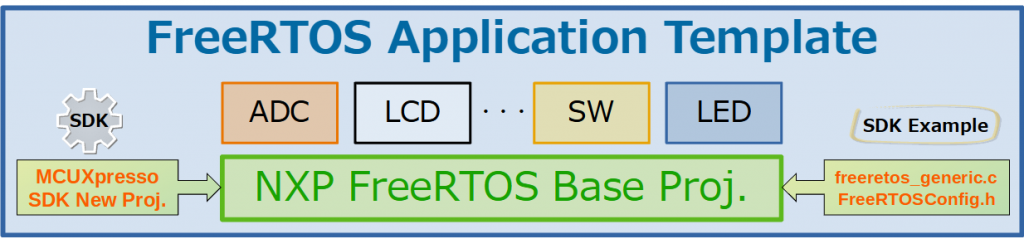
6Eリリース予定の弊社FreeRTOSアプリケーションテンプレート(税込2000円)は、主流のAmazon FreeRTOSを用い、NXP)LPCXpresso54114(Cortex-M4/150MHz、Flash/256KB、RAM/192KB)にて動作確認済みです。
添付するRTOSプロジェクトは、各RTOS共通機能SemaphoreとQueueを利用しており、上記習得アプローチを満たすツールとして、また、全ての物をつなげる主役IoT MCU RTOS基礎固めに最適です。