MCUXpresso54114評価ボードSDK付属FreeRTOSサンプルコード調査最終回の本稿は、タスク数=3のプロジェクト、freertos_eventとfreertos_queue、freertos_genericを説明します。
FreeRTOSサンプルコード:タスク数=3
| Project | Tasks | heap_ | Additional FreeRTOS APIs | Additional Comments |
| freertos_event | 3 | 4 | xEventGroupCreate xEventGroupSetBits xEventGroupWaitBits |
タスクや割込みなどのイベントをグループ化し、他タスク制御。 セマフォと似ているがイベントの論理演算可能。 |
| freertos_queue | 3 | 4 | xQueueCreate xQueueSend xQueueReceive vQueueAddToRegistry |
タスク間メッセージ通信デモ。キューは、順序維持FIFO構造。 |
| freertos_generic | 3 | 4 |
キュー、ソフトウェアタイマ、セマフォの組合せデモ。 FreeRTOS.orgサンプルコードに基づき作成。 |
※freertos_genericのAdditional FreeRTOS APIは、これまでのサンプルAPI組合せのため追加分なし。
FreeRTOS Project:freertos_event
イベントによるタスク制御は、セマフォに似ています。複数のセマフォを1つにまとめたイベントグループを作成(xEventGroupCreate)し、このグループ化した個々のイベント間で論理演算ができることが特徴です。
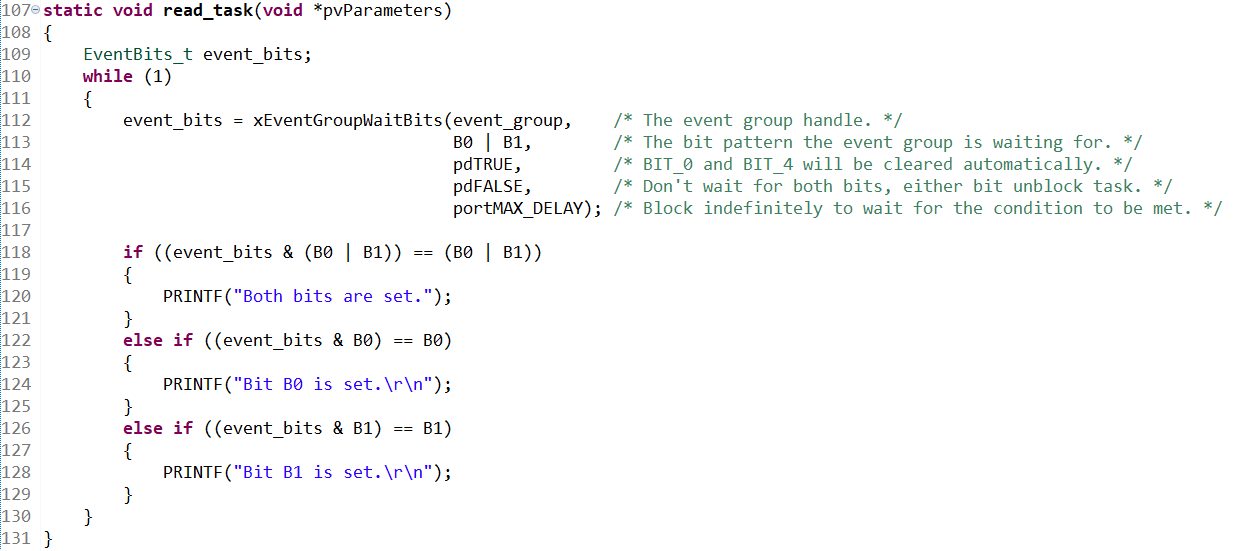
イベント間の論理演算ができるので、シングルイベントのセマフォよりも柔軟なタスク制御ができます。
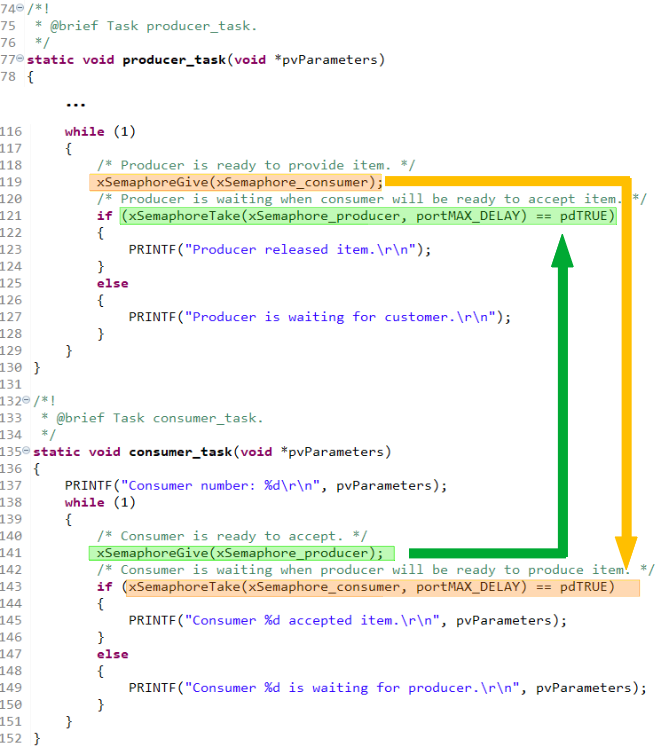
FreeRTOS Project:freertos_queue
これまで説明してきたプロジェクトのタスク間制御には、ミューテックスやセマフォ、上記イベントなど全てビット単位のシグナルを使ってきました。最後に説明するプロジェクトfreertos_queueは、タスク間でメッセージを送受信します。
メッセージは、キュー=有限長FIFO(First In First Out)経由で送受信されますので、メッセージの順番は維持されますが、キューが溢れないような使い方が必要です。深すぎるキューはメモリ効率が悪く、浅いキューではメッセージが溢れます。深さ見積もりなどのためにプロトタイプ開発が必要でしょう。
例えば、複数センサ出力をMCUでまとめ、定期的にクラウドへ送信するようなFreeRTOSアプリケーションソフトの素になりそうなプロジェクトです。クラウドサービスにAmazon Web Service(AWS)を使う時には、専用のネットワーク接続ライブラリもFreeRTOSで提供されますので、このアプリケーションとの親和性も良いと思います。
FreeRTOS Project:freertos_generic
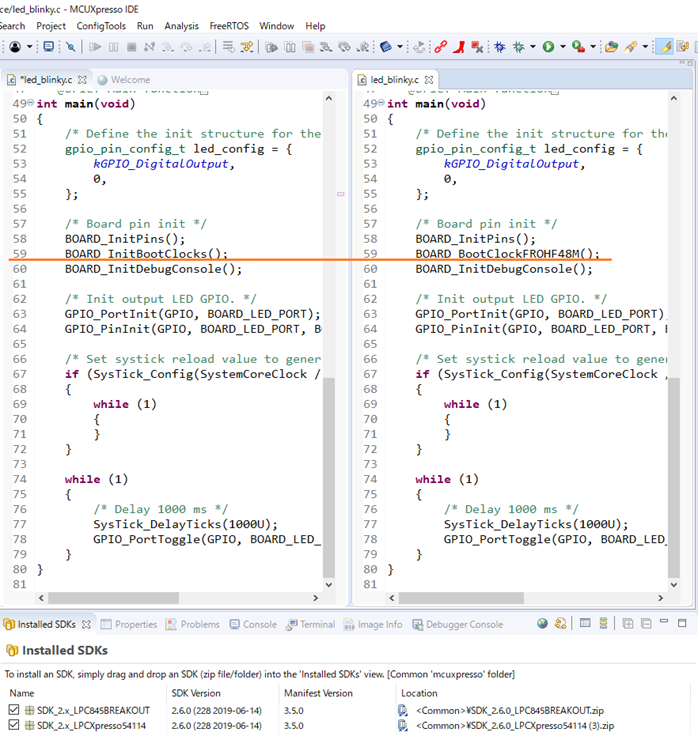
MCUXpresso54114評価ボードSDK付属FreeRTOSサンプルコード11個の説明の最後が、このfreertos_genericプロジェクトです。これまで説明してきた10個のサンプルコードを総合的にまとめたプロジェクトで、出典はhttp://www.freertos.org/Hardware-independent-RTOS-example.htmlです。
筆者の下手な説明よりも、実際にソースコードを見て頂くと丁寧なコメント付きです。このソースコードを読んでFreeRTOSの仕組みがすんなりと理解できれば、ベアメタルからFreeRTOSソフトウェア開発へのステップアップ初期段階は完了と言えるでしょう。つまり、10個サンプルコード習得度の自己評価に使えます。
FreeRTOSサンプルコード:タスク数=3の調査結果
- 複数セマフォを1つにまとめたイベントグループタスク制御は、イベント間の論理演算が可能
- キュー利用のタスク間メッセージ通信は、深さ設定にプロトタイプ開発が有効
- freertos_genericは、SDK付属サンプルコード10個の習得度評価に使える
- メモリ使用法は、heap_4を利用
まとめ:MCUXpresso54114評価ボードSDK付属FreeRTOSサンプルコード調査
5回に渡ってMCUXpresso54114評価ボードSDK付属FreeRTOSサンプルコードをタスク数が少ない順に調査しました。基本的なFreeRTOS機能は、解説済み11個のサンプルプロジェクトでカバーされています。
各プロジェクトの追加分FreeRTOS APIのみを表で示し、しかも弊社サイトマイコンRTOS習得2017の内容は既にご存じという前提で説明したので、解りにくい部分もあったかもしれません。
要するに、ベアメタル開発にFreeRTOS APIを追加すればRTOSソフトウェア開発ができることを強調したかったからです。
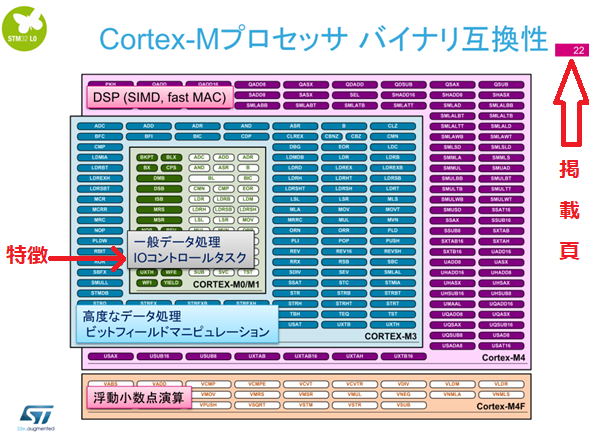
FreeRTOSのマルチタスク並列動作、タスク間同期/競合回避手段、これらのFreeRTOS APIのみを理解すれば、ベアメタル開発経験がそのまま活かせます。
今回の1~5回の解説は、マイコンRTOS習得2020年版として2017年版サイトへ改版する予定です。改版後にご覧になれば解りにくさが改善されるかもしれません。
調査目的は、開発予定のベアメタルCortex-M4テンプレートへのRTOS機能応用でした。現時点で、応用内容は不明確です。しばらく時間を頂いて明確化します。
ただ、マルチタスクFreeRTOSと異なり、ベアメタルテンプレートは、全て自分の制御下タスクです。タスク間同期やメッセージ送受信も、特別な工夫なく簡単に実現できます。
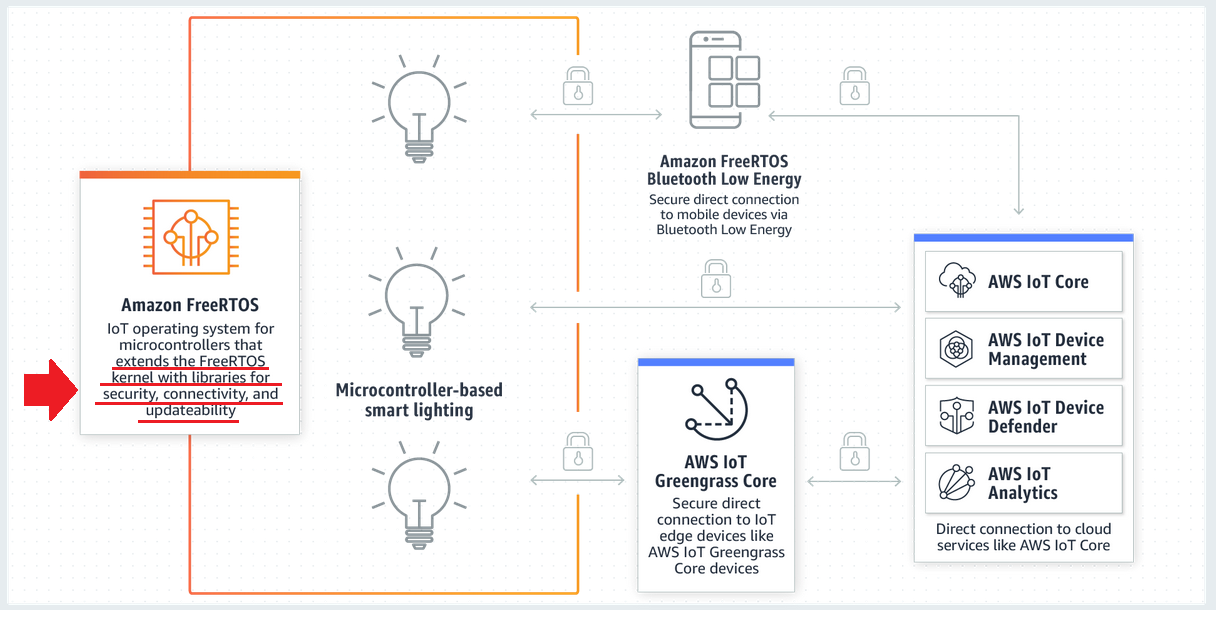
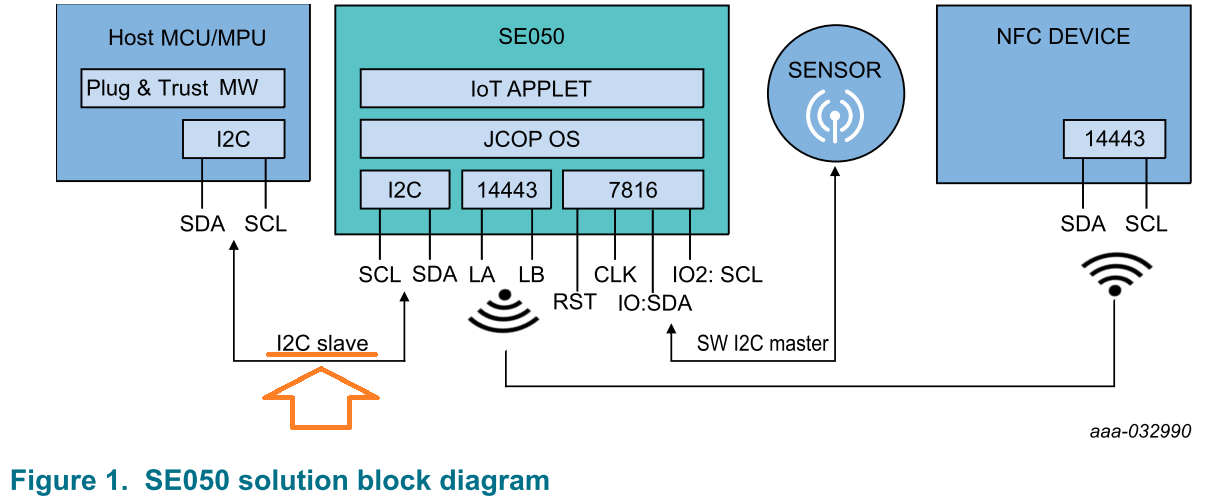
上図のように、AWSへの接続やIoTセキュリティ機能追加など今後必須になるIoT MCUの機能実装は、専用ライブラリベース、特にFreeRTOSライブラリで提供される可能性が高いと予想できます。
これらライブラリは、ベアメタル開発でも利用可能ですが、FreeRTOSソフトウェアの方が親和性も高く開発が容易なことも事実です。
しかも、これら専用ライブラリで実行される処理内容は、本来我々開発者が変更を加えるべきでない定型処理です(もちろんプロパティなどのパラメタは、開発者依存です)。
いずれにしても、MCUXpresso54114を使ったFreeRTOSソフトウェア開発環境と基本機能は習得できたので、ベアメタルCortex-M4テンプレート開発へ活かしていきます。