タスク数=1の前稿FreeRTOSサンプルコード(2)に続き、本稿は、タスク数=2のMCUXpresso54114評価ボードSDK付属FreeRTOSサンプルコードの前半3プロジェクトを説明します。
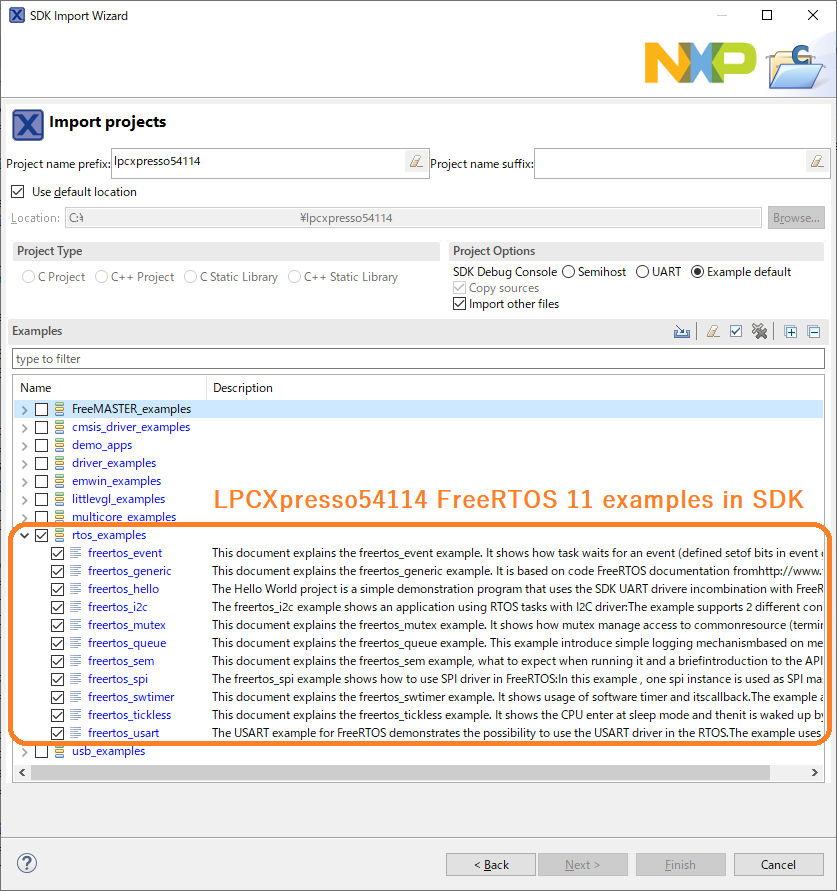
FreeRTOSサンプルコード:タスク数=2
| Project | Tasks | heap_ | Additional FreeRTOS APIs | Additional Comments |
| freertos_tickless | 2 | 4 |
vTaskDelay |
FreeRTOS低電力動作とSW_taskの2タスク並列動作説明。 Tickless_taskは、vTaskDelay、前稿hello_taskは、vTaskSuspend。 SW_taskは、Tickless_taskに何ら影響を与えない。 |
| freertos_i2c | 2 | 4 |
xSemaphoreCreateBinary |
master_taskとslave_taskの2タスク構成。正常動作結果は、Console窓出力。DoC>readme.txtでも結果が判る。 |
| freertos_spi | 2 | 4 |
xSemaphoreCreateBinary |
同上 |
タスク数=2のサンプルコードは、上記以外にもFreeRTOS特徴のミューテックスとセマフォ利用例がありますが、これらは次回説明します。
FreeRTOS Project:freertos_ tickles
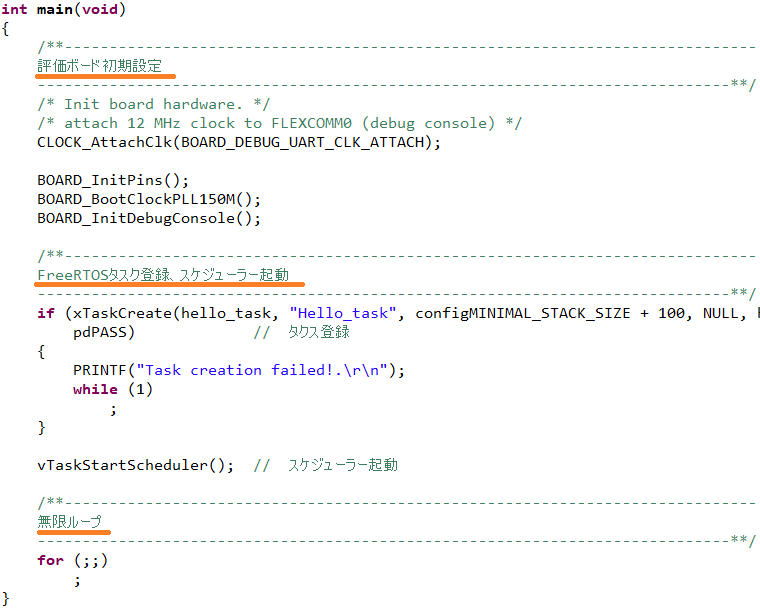
前稿説明のhello_taskは、Console窓に文字を1回出力し、「待ち状態」になりました。
hello_task とよく似たTickless_taskは、文字の代わりにxTaskGetTickCountで得た数字を1回出力し、vTaskDelayで5秒間の「停止状態(=低電力動作:Sleep)」になります。
低電力動作からの復帰Eventで、Tickless_taskは停止状態から実行可能状態へ移行し、スケジューラによって再実行されます。停止時間5秒間のtick回数がConsole窓に出力されます。
※FreeRTOSタスクの状態遷移図は、マイコンRTOS習得2017の第2部を参照。
このプロジェクトは、Tickless_task が、SW_task動作に全く影響を受けないFreeRTOSの特徴を説明しています。
つまり、Tickless_taskと、SW_taskは、それぞれ別々にあたかも自分のタスクがMCUを占有するように記述されており、かつその通り並列動作します。これがFreeRTOS利用ソフトウェア開発の最大メリットです。タスク開発は、ベアメタルソフトウェア開発に比べ簡単に、かつ流用性も大きくなるでしょう。
※SW3プッシュは、ソフトウェア、ハードウェアで何もチャタリッグ防止策をしていない処理の検証にも使えます。試しにSW3を長く押してチャタリッグが発生することを確かめてください。チャタリッグ防止策の必要性が解ります。
FreeRTOS Project:freertos_ i2cとfreertos_ spi
freertos_ i2cとfreertos_spiプロジェクトは、どちらもMCU内蔵I2C、またはSPIを使った外部デバイスとの通信サンプルコードです。どちらもmaster_taskとslave_taskの2タスクから構成されています。
main.cでslave_taskのみをタスク登録し、slave_task内でmaster_taskを登録しています。このように、FreeRTOSスケジューラ起動後でも、任意の場所で新たなタスク登録が可能です。
動作は、最初master_taskでデータ送信し、それをslave_taskで受信、次にslave_taskがデータ送信し、それをmaster_taskで受信し、両タスクとも正常終了します。
この動作シナリオは、slave_taskに記述されており、master_taskのデータ送信開始は、slave_taskのmaster_task登録の結果、並列実行されます。slave_taskのデータ受信と送信完了は、i2c_slave_callbackからのセマフォを使って判断しています。
評価ボード実装Arduinoコネクタ上の配線で、送受信データをループバック接続しますので、評価ボード1台のみで両タクス動作結果が、IDEのConsole窓に出力されます。
MCUXpresso54114評価ボードをお持ちでない方は、両プロジェクトのDoc>readme.txtのRunning the demoにConsole窓出力と同じ結果があるので解ります。
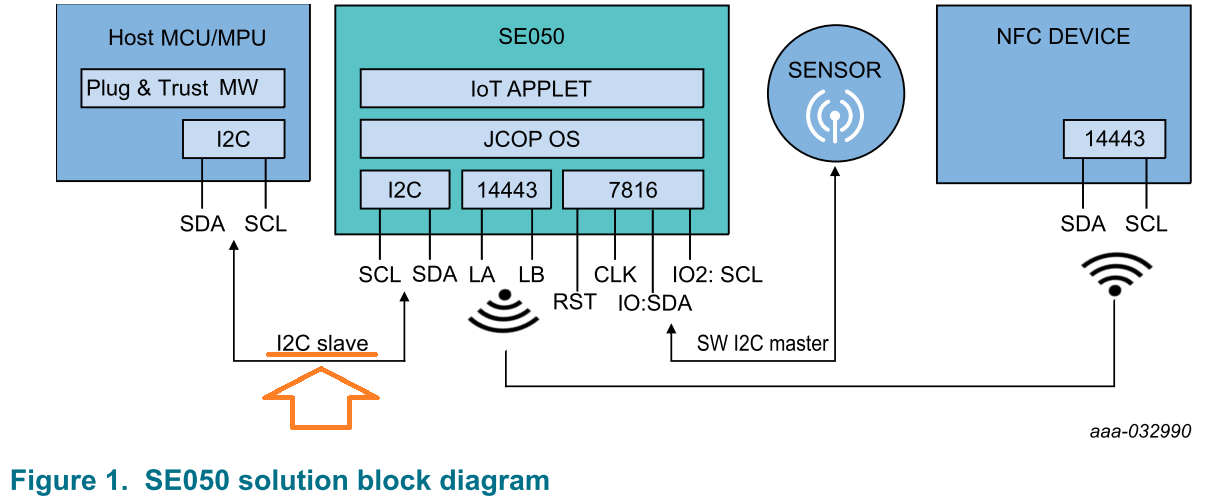
I2C/SPI通信対象のデバイスは、従来からの外付けEEPROMに加え、最近ではIoTセキュティデバイスなどがあります。
IoTセキュティデバイスは例えば、NXPのEdgeLookやMicrochipのCryptoAuthenticationファミリなどがあり、IoT MCUのクラウド接続には、これらデバイス利用が必須になりそうです。
FreeRTOSサンプルコード:タスク数=2(前半)の調査結果
- FreeRTOS低電力動作(Sleep)は、vTaskDelay(msec)で低電力動作開始と復帰
- タスク数が2と少ないので、タスク並列動作が解り易く、プライオリティ設定とその意味も理解容易
- I2C/SPI割込みISRとのタスク同期に、バイナリセマフォ利用
- 割込みcallback関数でセマフォをgive → 割込み処理タスクでセマフォをtake → セマフォ消滅
- IoT MCUは、セキュティデバイスとのI2C接続可能性大
- メモリ使用法は、heap_4を利用
セマフォ(Semaphore)同期は、マイコンRTOS習得2017の第3部:Semaphoreによるタスク同期の章に、図入り解説していますのでご参照ください。
FreeRTOSサンプルソースコードは、MCUXpresso IDEのみでも御覧頂けます。是非、PCへインストールし本稿をご参照ください。