FRDM-KL25Z評価ボードのタッチスライダ(Capacitive Touch Slider)の使い方を説明します。
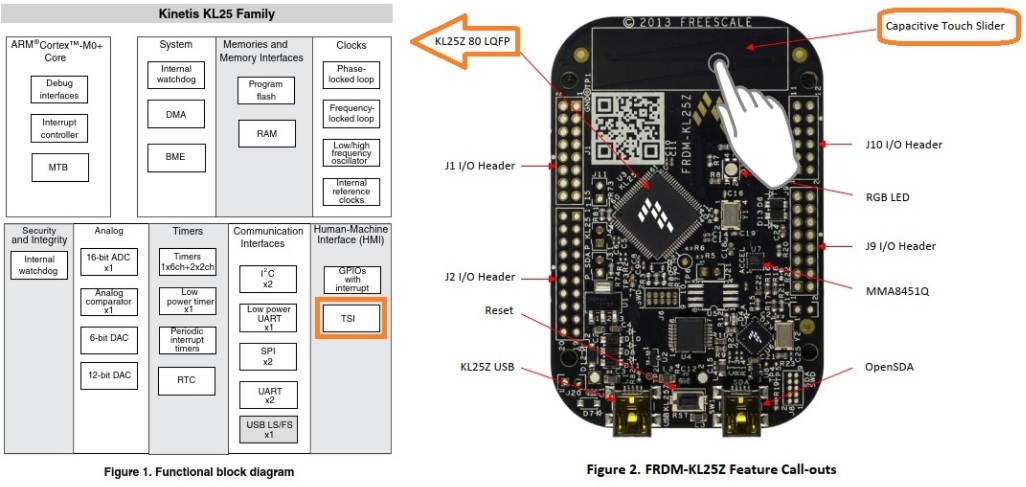
タッチスライダ
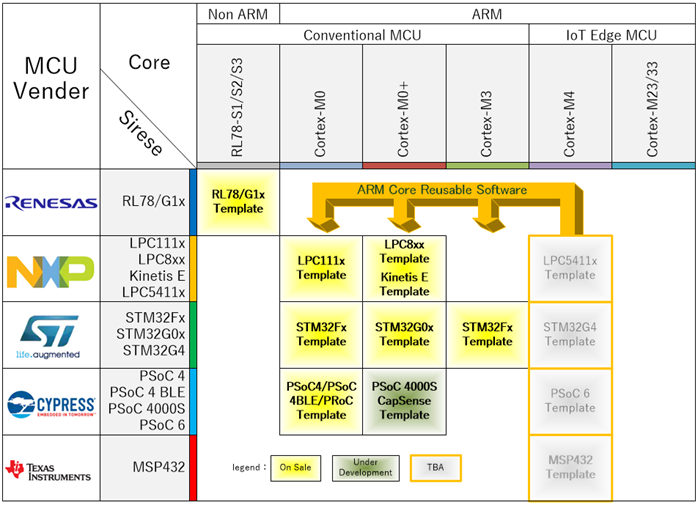
CypressのPSoC 4000S/4100S/4100PSテンプレートでも使用中の指によるタッチユーザインタフェースは、MCU入力手段として人気があります。
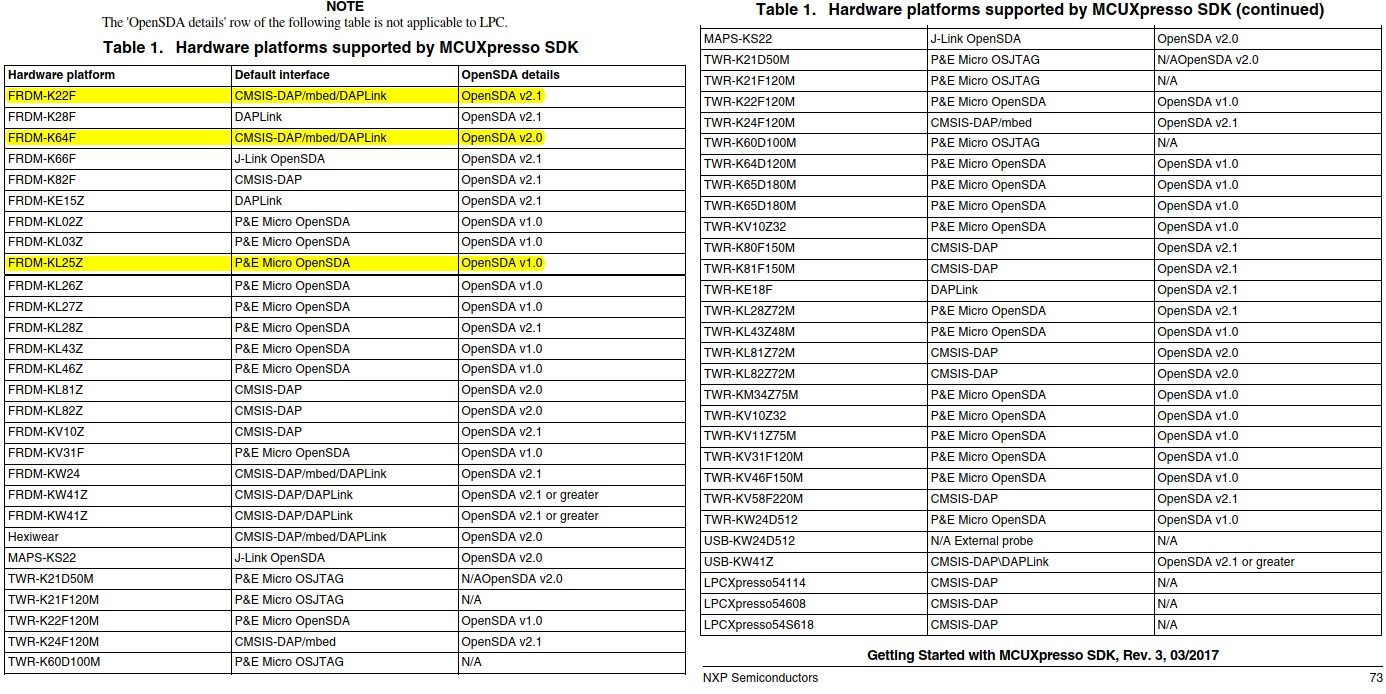
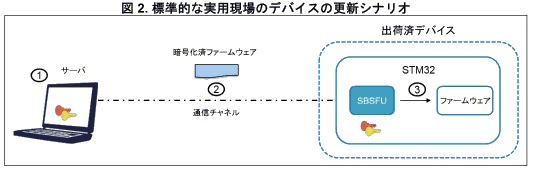
NXPの多くのFRDM評価ボードにもFigure2のようにCapacitive Touch Sliderが実装済みですが、これをタッチスライダとして動作させるには、MCU内蔵TSIハードウェアと、これを制御するTSIライブラリの両方が必須です。
※TSI:Touch Sensor Input。
例えば、FRDM-KE02Z40Mでは、TSIハードウェアがMCU非内蔵なためタッチスライダは動作しません。
MCUXpresso SDKのTSI:Touch Sensor Inputサンプルプロジェクト
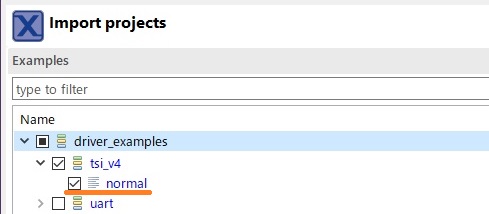
MCUXpresso SDKのTSIサンプルプロジェクトは、driver_examples>tsi_v4>normalにあります。MCUXpresso SDKの使い方は、関連投稿を参照してください。
以降は、サンプルプロジェクトのソースコードを横目で見ながら本稿を読んで頂くと良く分かると思います。が、ソースコードが無い場合には、まとめ章へスキップしてください。
tsi_v4_normal.cを見ると、このサンプルプロジェクトは、MCU内蔵TSIハードウェアをキャリブレーション(L127)後、下記3つの方法でTSIを制御しているサンプルであることが解ります。
※キャリブレーションとは、測定系ハードウェアの測定精度を上げる処理で、ADCなどでも必要です。
- (L136)SOFTWARE TRIIGER SACN USING POLLING METHOD
- (L159)SOFTWARE TRIIGER SACN USING INTERRUPT METHOD
- (L178)HARDWARE TRIIGER SACN
1や2でもTSIソフトウェアライブラリ単独制御ではなく、TSIハードウェア/ライブラリ両方が必須であることに注意してください。3も同様です。
サンプルプロジェクトでは、1~3の方法を順に処理し、各方法の最後にPRINTFで取得値xxxxをConsoleへ出力します。その出力例がreadme.txtにあります。
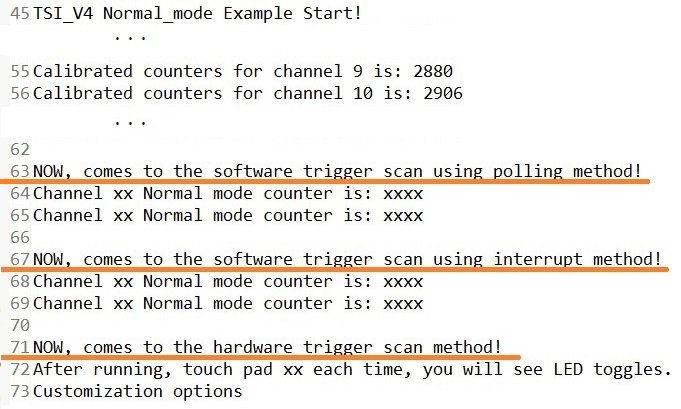
3番目のハードウェア割込み方法設定後、無限ループへ入ります。
このサンプルプロジェクトソースコードは、本来は3サンプルプロジェクトに分離すべきものを、1つにまとめた書き方をしています。つまり、TSIソフトウェアポーリングプロジェクト、TSIソフトウェア割込みプロジェクト、TSIハードウェア割込みプロジェクトを1つにまとめています(ので、少々解りにくいかもしれません)。
TSIソフトウェアポーリングプロジェクト
そこで、TSIソフトウェアポーリングプロジェクトのみを抽出します。
先ずは、ソフトウェアポーリング処理後、他の2方法を飛ばして無限ループへジャンプさせます。例えば、L157のTSI_ClearStatusFlags()の後にgoto LOOP;を追加し、無限ループの前に飛び先ラベルLOOP:を加えます。すると、ポーリング方法のみの処理結果がConsoleへ正常出力されます。
つまり、ソフトウェアポーリングのみで、1回TSI制御ができることが確認できました。
組込み処理は、初期設定と無限ループ内の繰返し処理の2つに分けて考えるのが常套手段です。そこで、ソフトウェアポーリングの方法も、初期設定と繰返し処理の2つへ分けます。
L101~L143がソフトウェアポーリングの初期設定、L143~L157が繰返し処理です(※L143がダブっているのは間違いではありません)。この繰返し処理先頭L143に無限ループに付加したラベルLOOP:を移動し、無限ループ化します(無限ループに加えたラベルは削除してください)。
動作させ、TSIソフトウェアポーリングプロジェクトのみの抽出と連続ポーリング処理が完成です。
他の2方法、TSIソフトウェア割込みプロジェクトや、TSIハードウェア割込みプロジェクトのみを抽出する場合も同様です。3プロジェクトに分離すると、各方法の理解がより深まります。
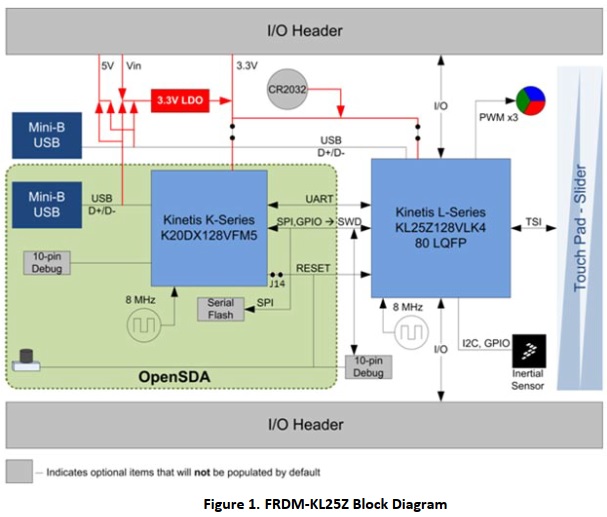
※FRDM-KL25Zは、TSI channel 9と10の両方を使っています。両チャネルを使うメリットは、2つあります。1つは、その取得値変化から、指がスライダの左右どちらへ移動したかが解ることです。抽出プロジェクトで、その取得値変化の様子を実際に試してください。

※もう1つのメリットは、タッチ感度が上がることです。上図のように、各チャネルカバー範囲は相補的ですので、片チャネルでタッチ検出するよりも両チャネル検出の方が、より高感度になります。
FRDM-KL25Z タッチスライダの使い方
前章までで、FRDM-KL25ZタッチスライダのSDKサンプルプロジェクト3制御方法を解説しました。
本章は、もっと実用的なタッチスライダの使い方を説明します。
前章のTSIソフトウェアポーリング方法で、TSIチャネル9のみを使い、タッチスライダを物理スイッチの代わりに動作させる使い方です。
この動作は、オリジナルサンプルプロジェクトのTSIハードウェア割込み方法で、タッチスライダを指で触るとLEDがトグル点滅、つまり、スライダではなくタッチパッドとして動作するのと同様です。物理スイッチではないので、経年変化が少ないことが特徴です。
FRDM-KL25Z の性能を100%使ったTSIサンプルプロジェクトでは、タッチスライダ動作も十分可能です。
しかし、FRDM-KL25ZでTSI処理以外にも様々な処理を行う場合は、このタッチパッド的使い方が実用的だと筆者は思います。オリジナルサンプルプロジェクトも、この事を暗に示しているのかもしれません。
FRDM-KL25Z タッチスライダの初期設定
初期設定は、抽出したTSIソフトウェアポーリングプロジェクトの初期設定からチャネル10設定分を削除します。
FRDM-KL25Z タッチスライダの無限ループ内処理
抽出プロジェクトは、無限ループ内でチャネル9と10を「連続計測」しConsole出力しました。実用的な処理では、タッチスライダ処理以外の様々な他の処理を1個のMCUで行うため、この計測処理は(他の様々な処理が間に挟まるため)「離散的」になります。
離散計測処理を行う際の注意点は、チャタリング対策です。
指によるタッチであっても、本当にタッチしたのか、または、たまたま触っただけなのかをソフトウェア側で判断する必要があり、これをチャタリング対策(=入力ノイズ対策)と言います。
例えば、複数回の離散タッチ検出ならば本当のタッチ、1回のみのタッチ検出ならば、触っただけのノイズでタッチと判断しない等です。
まとめ
FRDM-KL25Z評価ボード付属タッチスライダ制御を、MCUXpresso SDK TSIサンプルプロジェクトのソフトウェアポーリング、ソフトウェア割込み、ハードウェア割込みの3方法から解説し、タッチスライダを物理スイッチの代わりに動作させるタッチパッド的な使い方を説明しました。
3方法をまとめたオリジナルサンプルプロジェクトを、方法別に分離プロジェクト化し、初期設定と無限ループ内処理の2つに分け、ループ内処理のソフトウェアチャタリング対策を説明しました。
開発中のKinetis Lテンプレートには、本稿で示したチャタリング対策済みの応用例を添付します。