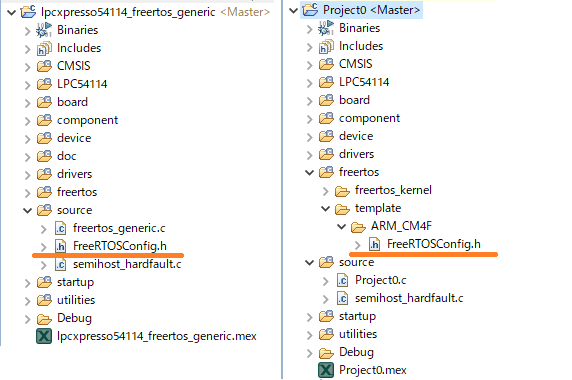
2021年6E目標に、FreeRTOSアプリケーションテンプレート新発売(税込価格2000円予定)を目指しています。このFreeRTOSアプリケーションテンプレート構想を示します。
FreeRTOSアプリケーションテンプレート構想骨子
FreeRTOSアプリケーションテンプレート構成ボード
実務利用可能なFreeRTOSアプリケーションテンプレート提供
FreeRTOS開発とベアメタル開発のアプリケーション直接比較可能
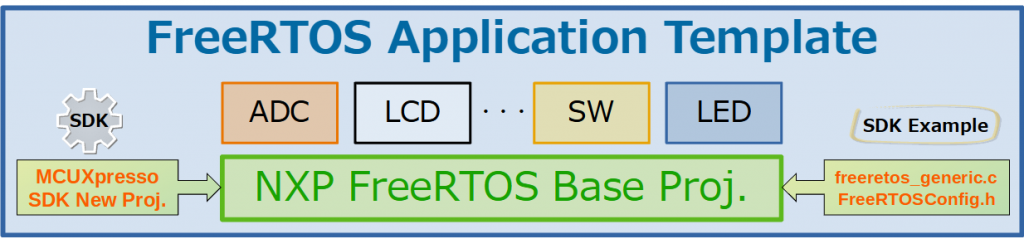
第1弾はNXP)LPCXpresso54114のSDK(Software Development Kit)で開発、次回STMのコード生成ツールなど利用予定
FreeRTOSソフトウェア開発は面白いです。従来ベアメタル開発手法が使える部分と、新たにFreeRTOS向きの工夫が必要な部分、つまり差分があるからです。
弊社FreeRTOSアプリケーションテンプレートは、この面白さや差分を開発者に味わって頂き、IoT MCUのRTOS普及期に備えることを目的に開発しようと考えています。
対象者は、既にMCUベアメタル開発ができ、新たにFreeRTOSを習得したい開発者とします。過去に弊社テンプレート のご購入者様は、50%割引特典の1000円で購入できます。MCUコアは、FreeRTOS能力を十分引き出すCortex-M4クラスを利用します。
FreeRTOS講座問題点
MCUベンダによるFreeRTOS講座は、①FreeRTOS基礎知識、②FreeRTOSのIDE利用方法、③クラウド接続例など盛りだくさんの内容です。
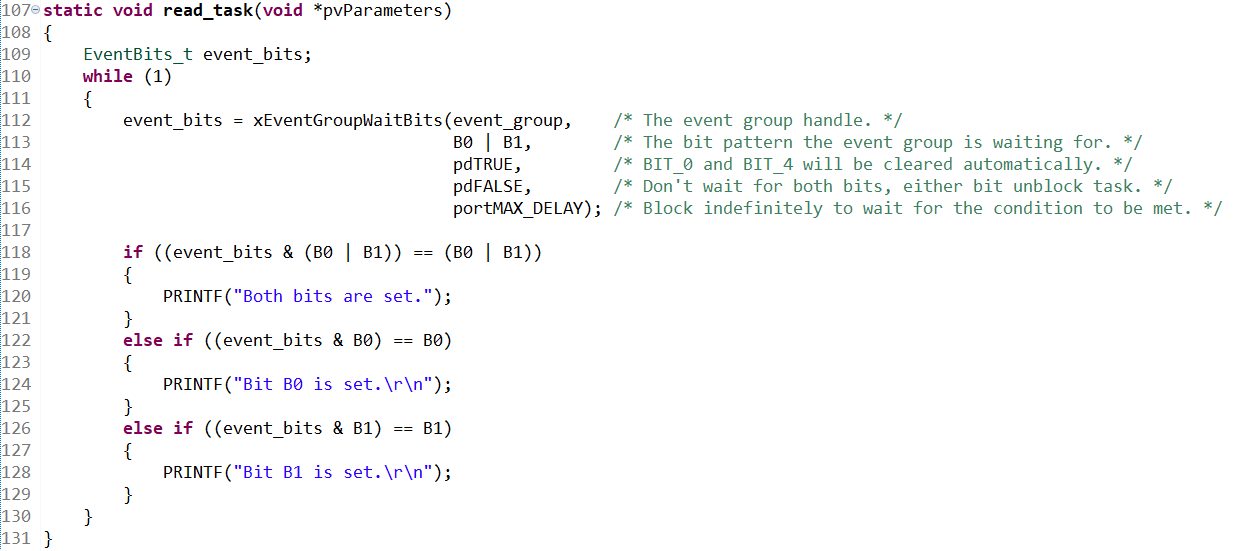
FreeRTOS基礎知識で、セマフォなどのFreeRTOS関連技術やタクス分割、ユーザタスクプライオリティ、RAM使用量増加などが理解できますが、サンプルコード以外の具体的なアプリケーションでもFreeRTOSを動作させたいと欲求不満になります。
FreeRTOSのIDE利用時、特にコード生成ツールをIDEと併用する場合、①で使ったFreeRTOSサンプルソースコードに、更にベアメタル開発が前提のコード生成ツール出力コードも加わるため、追加分がFreeRTOS理解の邪魔になります。
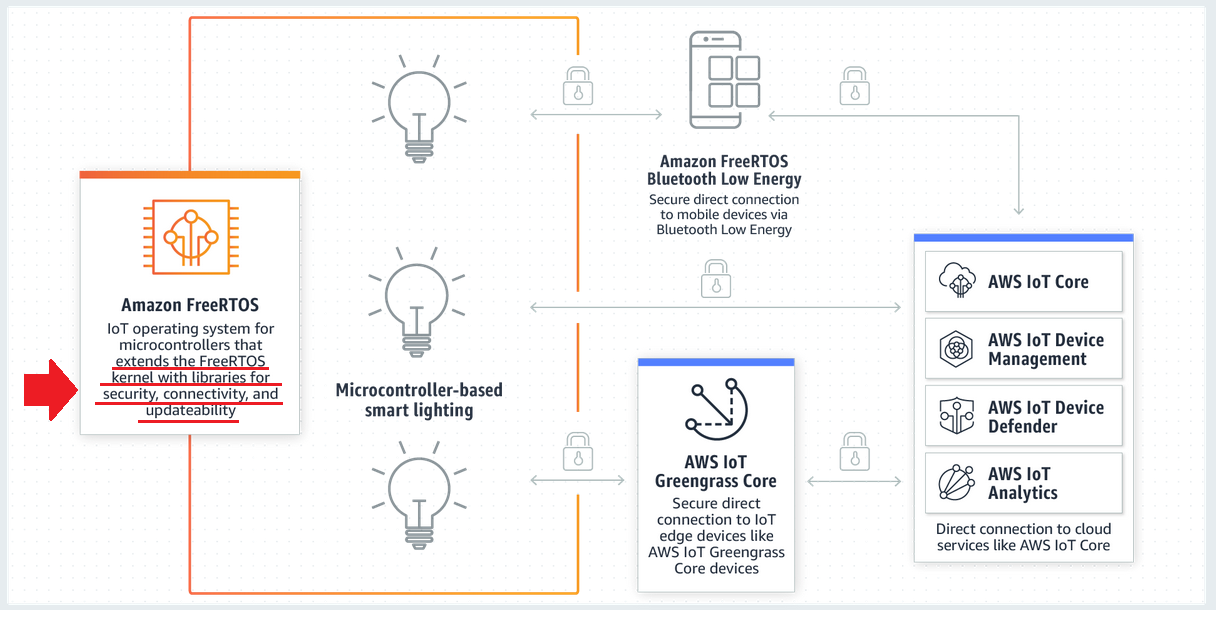
IoTクラウド接続にFreeRTOSは必須です。しかし、主流のAWS(Amazon Web Services)以外にもMicrosoftのAzureなどもあり、FreeRTOS以外の様々な知識(例えばMQTTプロトコルなど)がクラウド接続のためだけに必要です。
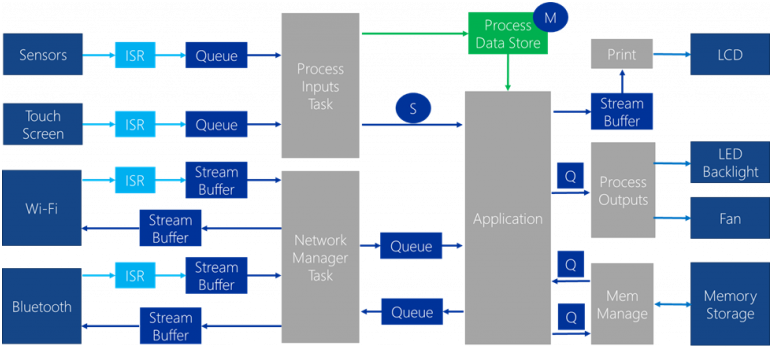
FreeRTOS本体とユーザ追加タスク、この「両方の動作」をしっかりと把握しないとFreeRTOS開発のメリットが享受できないこと、これがベアメタル開発との最大の差です。
FreeRTOSとベアメタルとの違いを理解することが最優先、2. はSDK利用で回避、3. は時期尚早です。
ベンダ講座の主旨は、①FreeRTOS基礎知識に加え、自社製品へのユーザ囲い込みも目的のため、②や③は必然です。しかし、現段階ではFreeRTOSそのものを知り、IoT MCUのRTOS普及期(FreeRTOS、Mbed OS 、μITRONなど)に備えるためのツールが欲しいと思い、ネット検索しましたが見当たりません。
そこで、開発するのが弊社FreeRTOSアプリケーションテンプレートです。
FreeRTOSアプリケーションとベアメタル比較
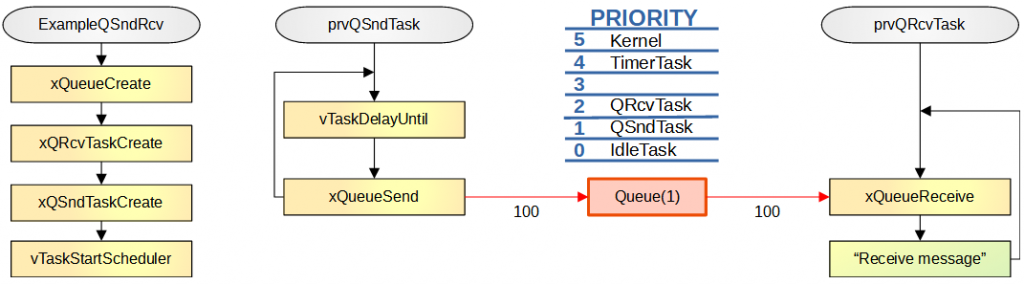
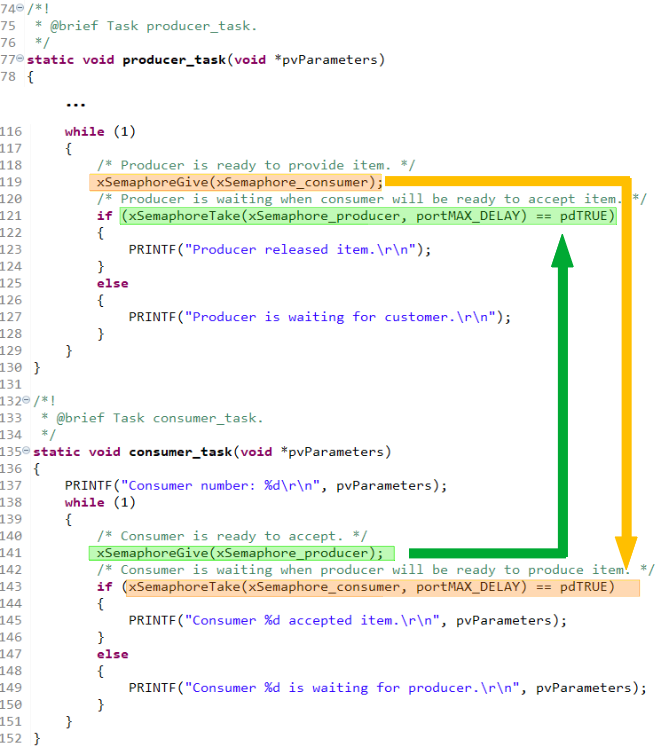
FreeRTOSサンプルコードは、セマフォなどのFreeRTOSで使う技術解説が目的です。従って、サンプル付属タスクはシンプルで解り易く作られています。
サンプルコードは、実務アプリケーションとは乖離しており、タスク分割やユーザタスクが複数ある時の優先順位設定、RAM使用量がベアメタル比どれ程増加するかなど肝心のFreeRTOS実務利用時ノウハウは、サンプルコードからは判りません。
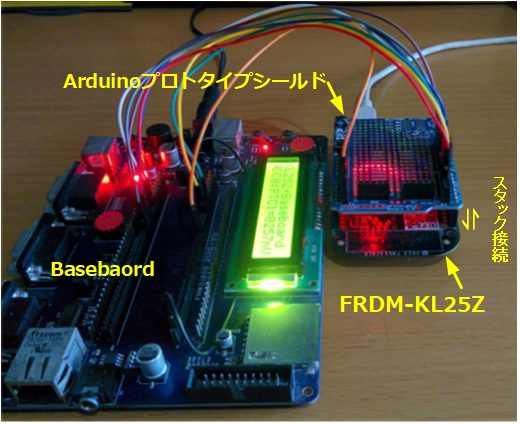
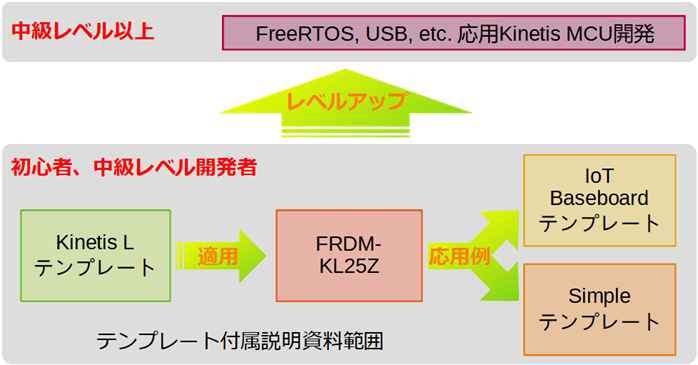
そこで、弊社が過去提供してきたベアメタル開発のIoT Baseboardテンプレート と同じ動作のアプリケーションを、FreeRTOSを使って開発します。つまり、同じ評価ボードで同じアプリケーション動作を、FreeRTOSとベアメタルの両方で開発します。
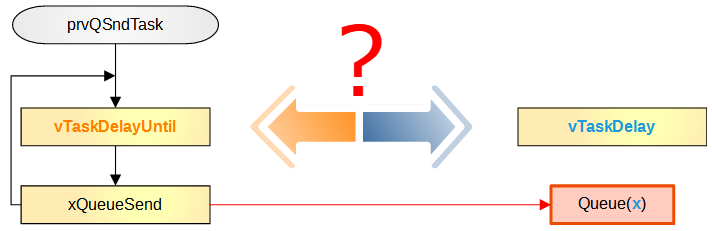
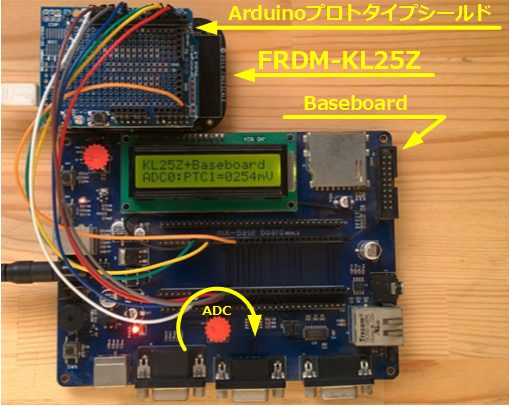
ベアメタル開発IoT Baseboardテンプレート(評価ボードはFRDM-KL25Z、これがLPCXpresso54114に変る) FreeRTOS/ベアメタル両アプリケーションの比較により、複数実務タスクでの優先順位設定やRAM増加量が具体的に判ります。また、優先順位やRAM使用法などのFreeRTOS重要パラメタを変えた時の動作変化も判ります。
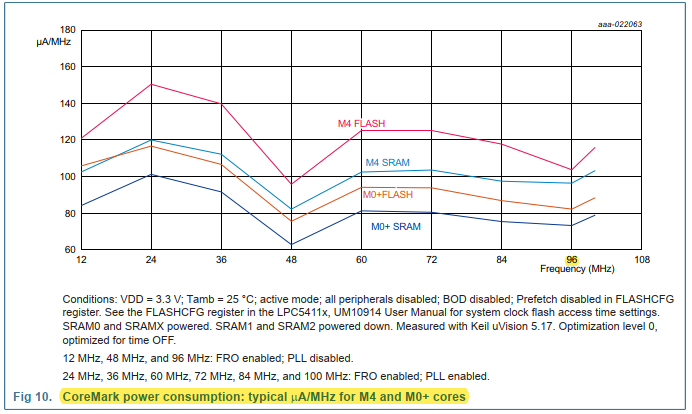
もちろん一例にすぎませんが、FreeRTOS/ベアメタルのアプリケーション差、開発困難/容易、消費電力差など、実務開発時に知りたい事柄を評価 でき、かつ、基本的なFreeRTOSアプリケーションのテンプレート としても利用可能です。
FreeRTOSアプリケーションテンプレートは、下記動作を予定しています。
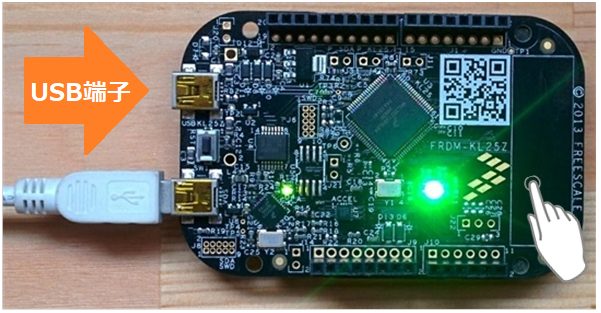
評価ボード搭載LED周期点滅とVCOMメッセージ入出力
Arduinoプロトタイプシールド搭載ユーザSWプッシュによる搭載LED点滅
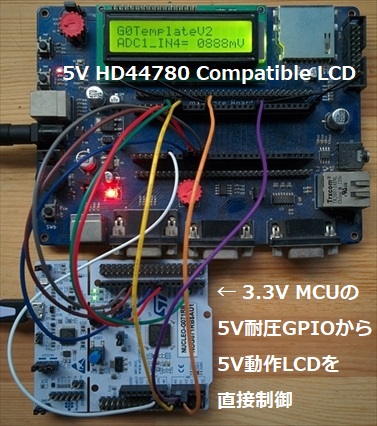
Baseboard搭載LCDメッセージ出力とポテンショメータADC変換値のLCD出力
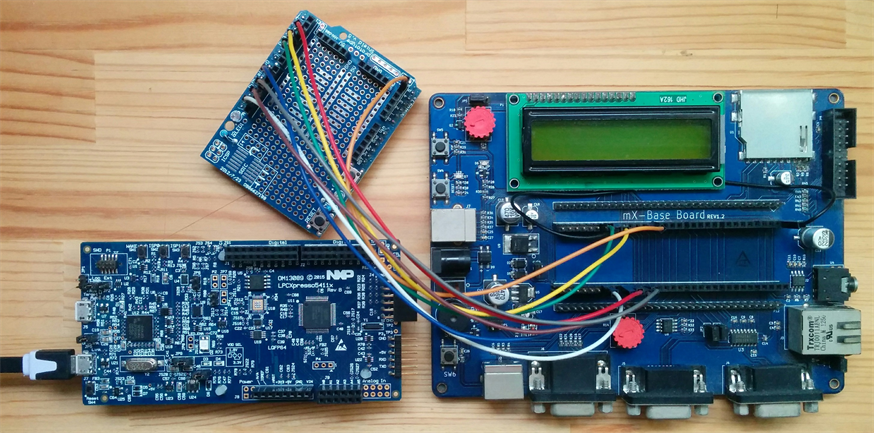
FreeRTOS/ベアメタル両アプリケーションは、評価ボード+Arduinoプロトタイプシールド+Baseboardで動作確認済みです。FreeRTOSアプリケーションテンプレートには、FreeRTOS/ベアメタルそれぞれの動作プロジェクトファイルがあり、FreeRTOSアプリケーション詳細説明を付属資料へ添付します。
SDKとコード生成ツールのAPI比較
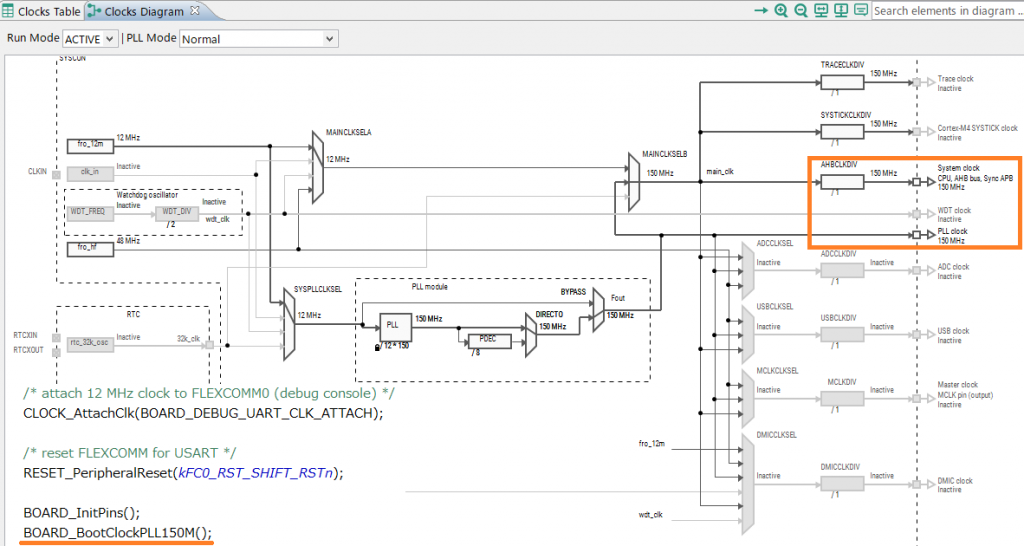
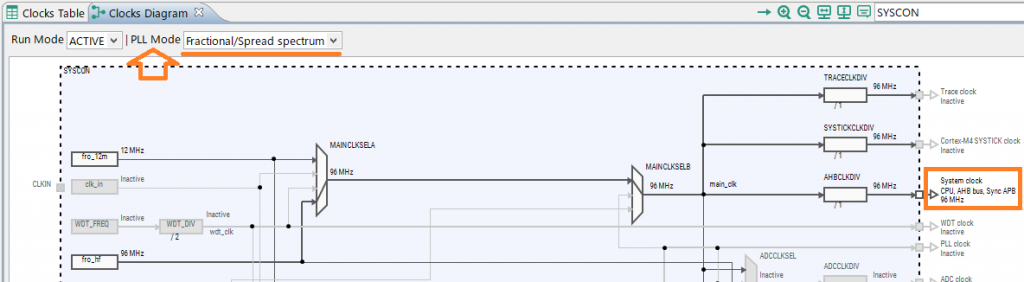
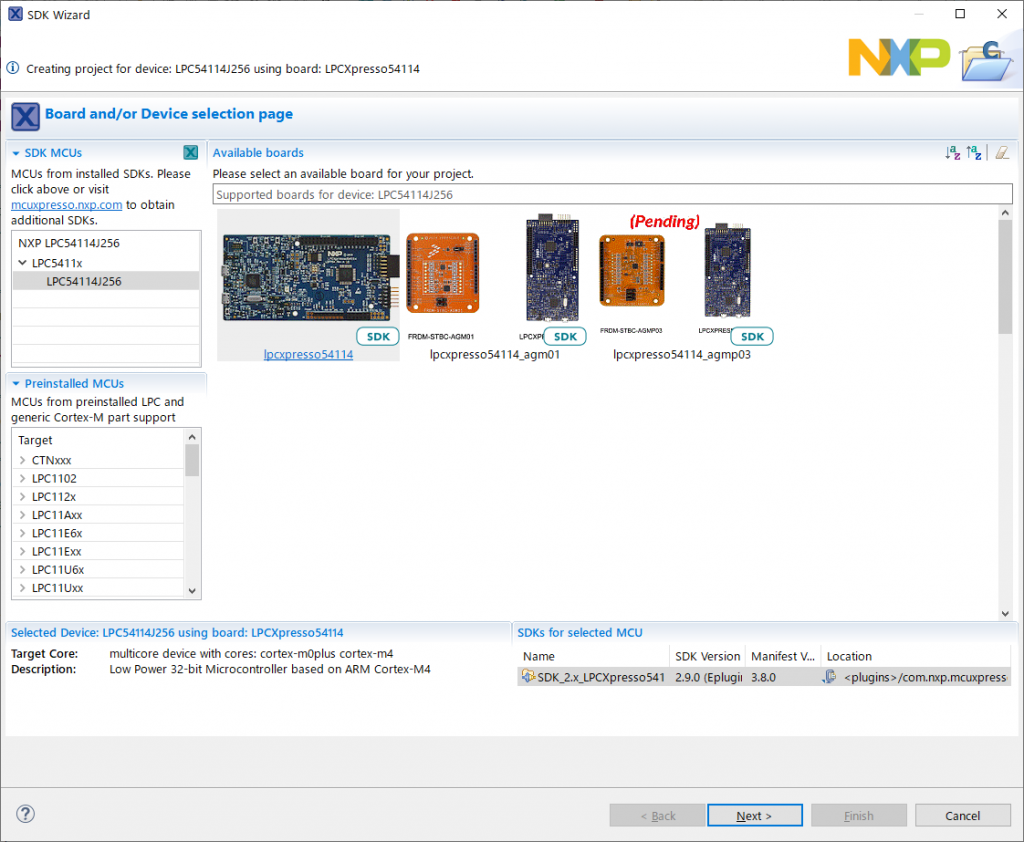
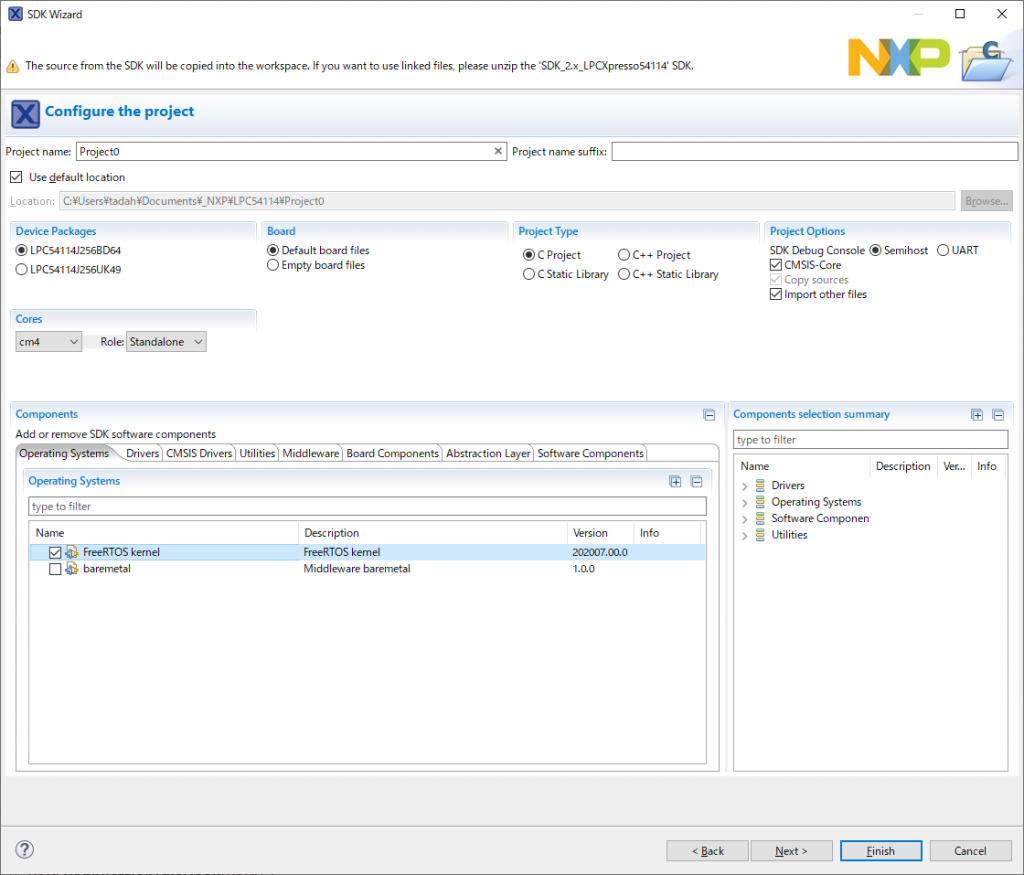
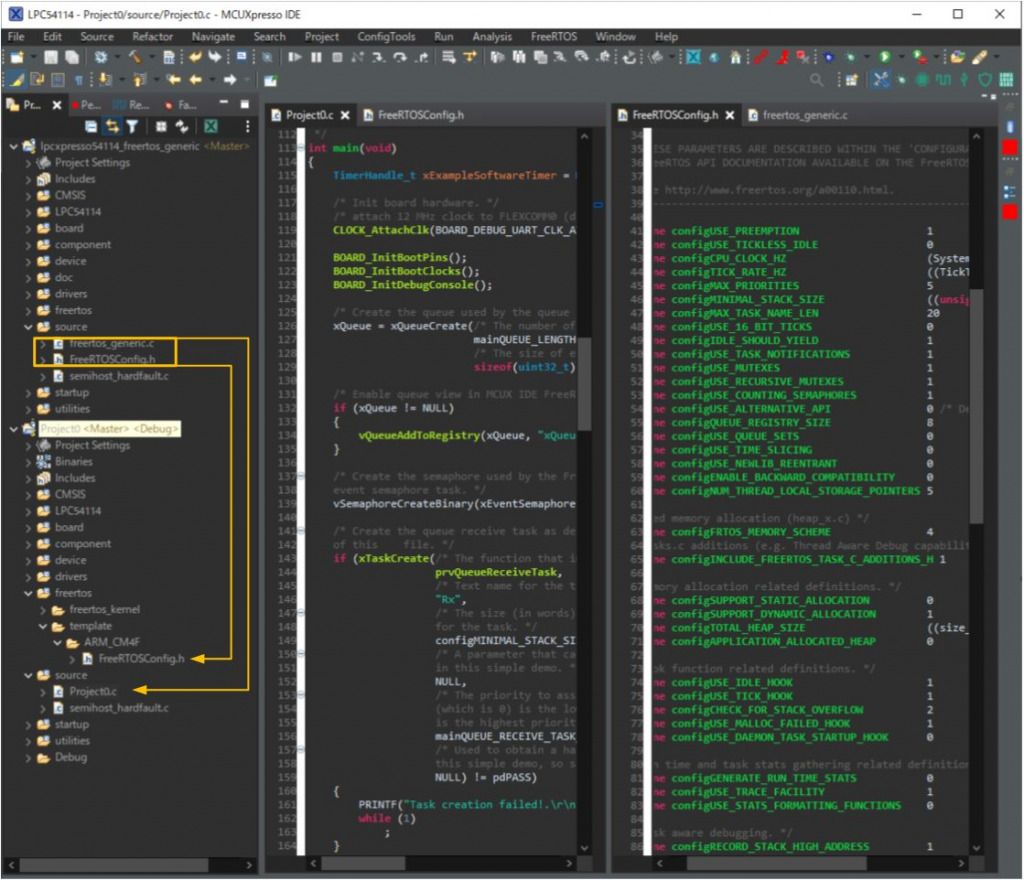
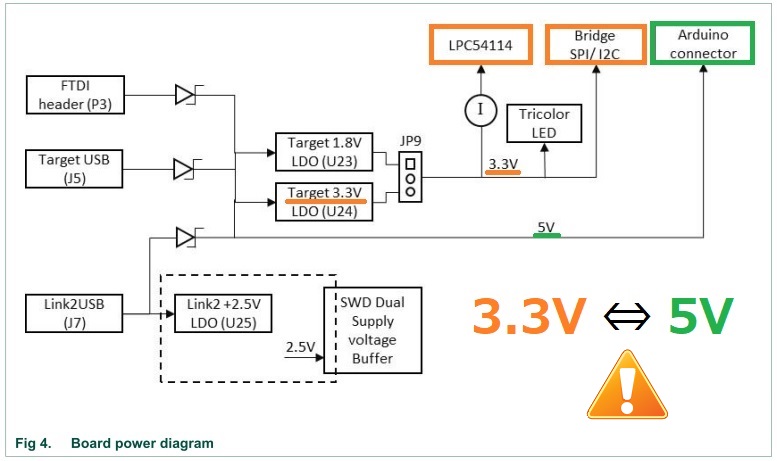
FreeRTOSアプリケーションテンプレートの第一弾評価ボードは、NXPのLPCXpresso54114 (Cortex-M4/100MHz、256KB/Flash、192KB/RAM)を使います。
弊社MCU RTOS習得(2020年版) の解説にも使っていること、FreeRTOSサンプルコードが11種類と多く、かつSDKで提供されていることが理由です。
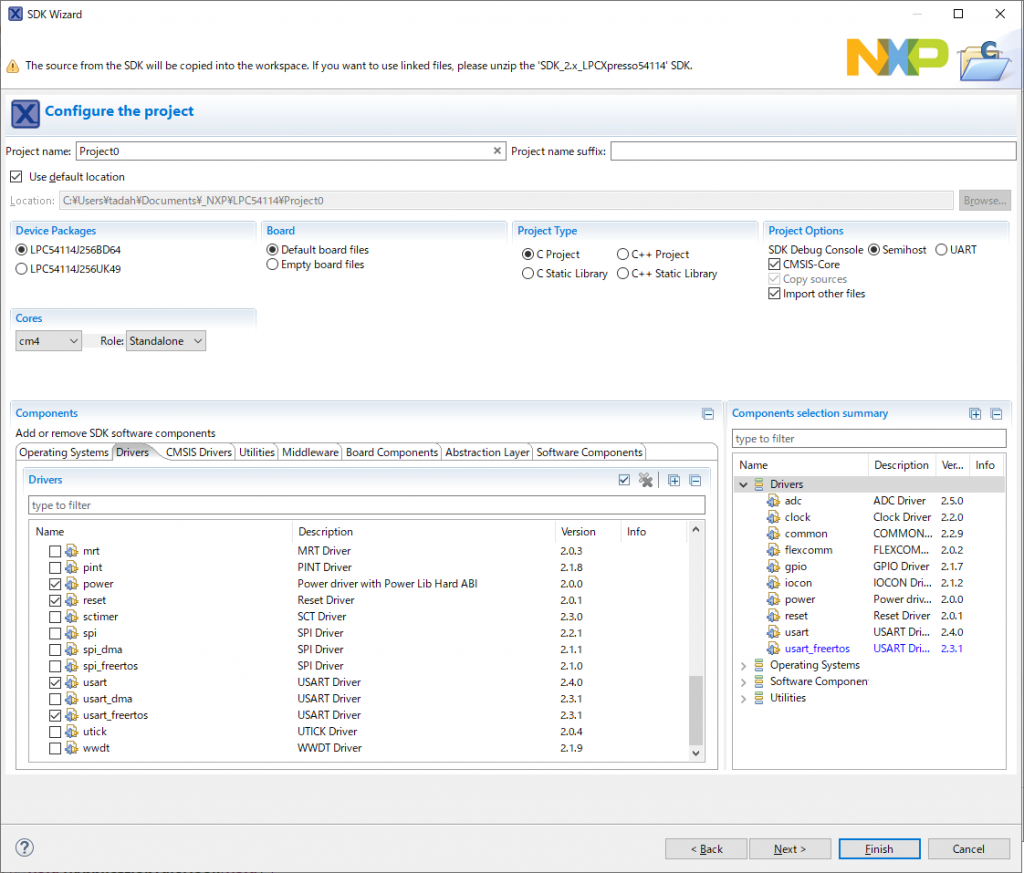
SDKとコード生成ツールのAPI比較は、コチラ の関連投稿の3章をご覧ください。SDK利用を、関連投稿ではMCU設定タイプと記載しています。
APIパラメタが多いのがSDKです。このパラメタをFreeRTOS側でも使う可能性があること、コード生成ツールの使い方を別途説明しなくてもFreeRTOSサンプルコードのみに集中できること、これらも第一弾評価ボードにLPCXpresso54114を選定した理由です。
STマイクロエレクトロニクスのコード生成ツール:STM32CubeMXも、FreeRTOSアプリケーション開発に適応済です。第1弾はSDK利用ですが、STM32G4(Cortex-M4/170MHz、512KB/Flash、96KB/RAM)評価ボードなど、コード生成ツール利用のCortex-M4クラスMCUも、順次FreeRTOSアプリケーションテンプレートを開発したいと考えています。
クラウド接続はブラックボックスライブラリ利用
IoT MCUと接続するクラウドは、無償ではありません。接続には、クラウド側から有償接続ライブラリを取得し、これをIoT MCUのFreeRTOSへ組込んだ後、必要な接続APIを利用します。
有償ライブラリ自身は、ユーザがその内容を変える必要は無く、ブラックボックスとして利用するだけです。IoTクラウド接続時には必須ですが、FreeRTOS理解・習得時には不要です。
まとめ
Cortex-M4クラスのIoT MCUへFreeRTOSを利用するメリットは、独立の単体タクス設計ができ開発タスク資産化も容易なことです。
しかし、複数タスクをFreeRTOSで上手く動作させるには、タスク間の優先順位設計やRAMメモリ使用法などベアメタル開発には無かったFreeRTOS向けの新スキルが必要になります。
これらスキル習得とFreeRTOS基礎固め、FreeRTOS/ベアメタル比較評価のため、開発者個人で低価格購入できるFreeRTOSアプリケーションテンプレートを6E目標に開発予定です。これは、基本的なFreeRTOSアプリケーションのテンプレートとしても利用可能です。
発売時には、FreeRTOSアプリケーションで実際に使用した実務FreeRTOS技術、優先順位設計結果なども付属資料で示します。
本FreeRTOSアプリケーションテンプレートに関するご意見などは、info@happytech.jp へお寄せください。