本稿は、IoT MCUソフトウェア/ハードウェア開発者向けTipsで、「MCU開発基本のキ」シリーズの第1回目です。MCUベンダ横断的に開発ポイント、Tipsなどを不定期に投稿します。
今回は、そもそもIoT MCUに、なぜセキュリティが必要かという最も基本的な点について示します。
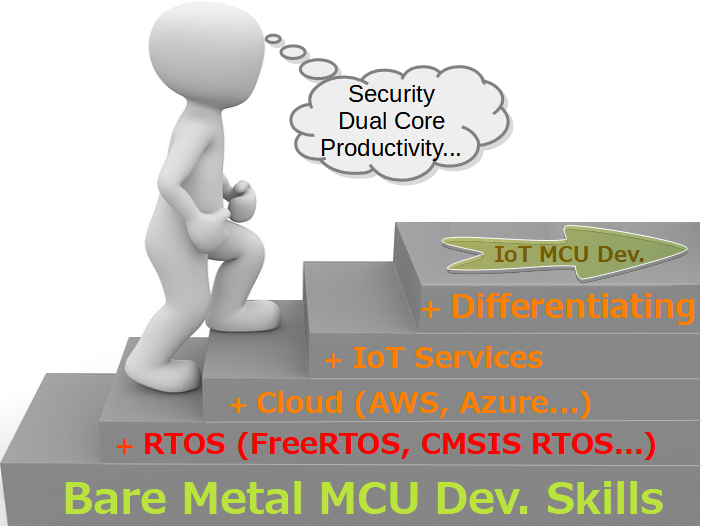
幅広い技術がIoT MCU開発者には必要です。しかし、全てを理解し、時々刻々変化する状況に対応するには時間がいくらあっても足りません。情報が多く幅広いからこそ、短時間で効率的なIoT MCU開発のためのポイントやTipsが必要です。
このポイントやTipsについて筆者個人の考え方を示します。これを、たたき台にして、ブログ読者の方々の考え方に発展・貢献できれば幸いです。
接続とセキュリティ

IoT MCUは、インターネットなどに接続し動作することが前提です。
人がネットに接続する時は、事前にアカウント登録し、IDやパスワードなどの登録情報を接続時に手入力、ネット側で受信データと事前登録情報と比較し接続を許可します。
IoT MCUは、人の手入力の代わりに自動で登録情報をネット送信することで接続します。この時大切なのが、IoT MCU内部に保存済みの登録情報です。登録情報をサイバー攻撃やハッカーから守る手段がIoT MCUセキュリティです。
ハッカー、セキュリティ、OTA
ハッカーとセキュリティは、「いたちごっこ」を繰返します。
例えば、コチラのFirefox 91とWindows 10規定ブラウザー設定、Windows 11で更に複雑化する設定がその例です。この場合、ハッカー役がFirefox、セキュリティ役がWindow設定です。
様々なIoT MCUセキュリティ手段がありますが、ポイントは、守りは攻めに対する対処療法なので守りの追加や更新が必要となる点です。
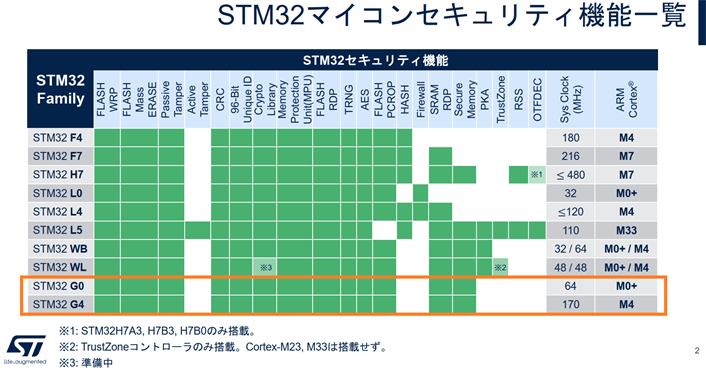
つまり、個々のセキュリティ手段を知ることよりも、何を(IoT MCUの登録情報や秘密鍵などの重要情報)どのように守るかの方がより重要です。ソフトウェアによる守りよりもより強固な内蔵ハードウェアで重要情報を守るのが、ARM Cortex-M33コアのTrustZoneです。
いたちごっこの終息策として、MCU内蔵TrustZoneとその制御ソフトウェアを採用した訳です。
Windows 11で導入されるTPM 2.0も、TrustZone相当です。しかし、TPM保護PCから情報を抜出す方法という記事もあります。セキュリティには終わりが無いと言っても良いでしょう。
終わりが無いので、OTA(Over The Air)によりセキュリティ手段の追加や制御方法更新が必要になる訳です。OTAは、IoT MCUセキュリティ追加更新が本来の目的で、ソフトウェアバグ修正は副次的だと思います。
接続伝送路エラー訂正
無線であれ有線であれ、ネット接続の伝送路にノイズ混入の可能性があります。ただ、IoT MCUセキィリティが正常か異常かの判断は、受信データにノイズ(誤り)が無いことが前提です。
そこで、受信側に、受信データに混入ノイズを除去する機能があれば便利です。
2021年9月9日、米)MITは、あらゆる種類のデータ誤り検出し訂正するGuessing Random Additive Noise Decoding (GRAND)採用のハードウェアデコーダを開発しました。128ビットまでのコードを約1u秒でデコードでき、高速通信規格5GやIoT分野での利用が期待されています。
まとめ:IoT MCUセキュリティ3Tips
- ネット接続が前提のIoT MCUには、サイバー攻撃から内蔵重要情報を守るセキィリティ必須
- セキュリティは、対処療法なので機能追加更新OTA必須
- より強固に重要情報を守るTrustZone、受信データ誤り検出訂正GRANDデコーダなどのセキュリティ対策ハードウェアが、IoT MCU要件になる可能性あり
IoT MCUセキュリティ用語、関連性、対策ハードウェアがご理解頂けたと思います。
※TrustZoneに似たハードウェアに、ルネサス:Trusted Secure IP(TSIP)、STマイクロ:Secure Memoryなどもあります。
セキュリティは終わりがありません。どの程度のセキュリティをIoT MCUへ実装すれば良いかを検討するには、IoTセキュリティ手引書やPlatform Security Architecture: PSA Certified認証制度などが参考になります。
但し、IoT MCU開発者に解り易いかと言えば、正直疑問も感じます。そこで、IoT MCUセキュリティ関連で、最低限開発者が押さえておくべき3項目をまとめました。
特に項目3は、初めからIoT MCUに実装済みでないと後付けやOTA更新ができません。今後の欧米IoT規格や総務省動向にも注意を払う必要があるでしょう。
補足:IoTセキュリティコスト
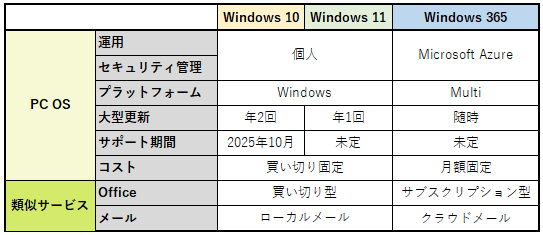
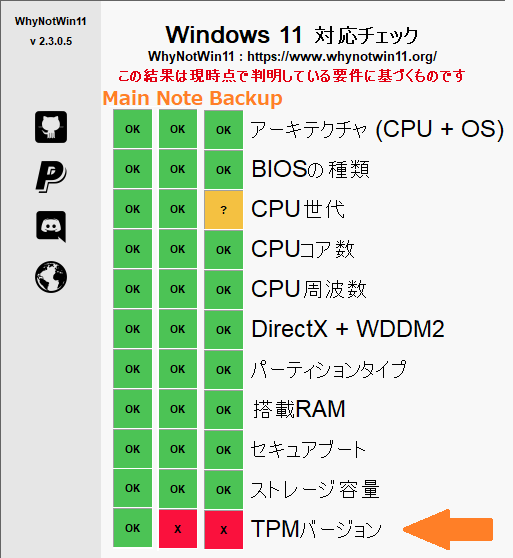
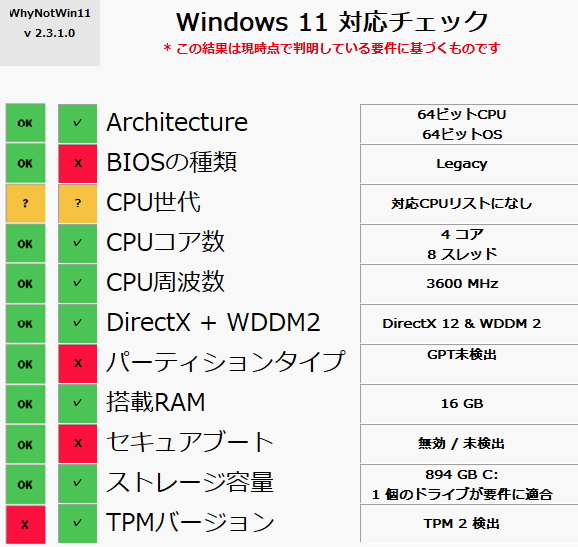
筆者利用ネットカフェPCのWindows 11対応チェック結果を抜粋したのが下図です。2PCのみ抜粋しましたが、他PCも同様で、全項目OKのPCは皆無でした。弊社PCも3PC中1台のみ全OKですので、Windows 11無償アップグレード可能PCは、Windows 10 PCの30%以下になりそうです。
Windows 10サポート終了の2025年10月以降、多くのWindows 10セキュリティが低下し、サイバー攻撃に弱くなります。セキュリティ対サイバー攻撃コストを示すのは大変でしょうが、Microsoftは示す責任があると思います。
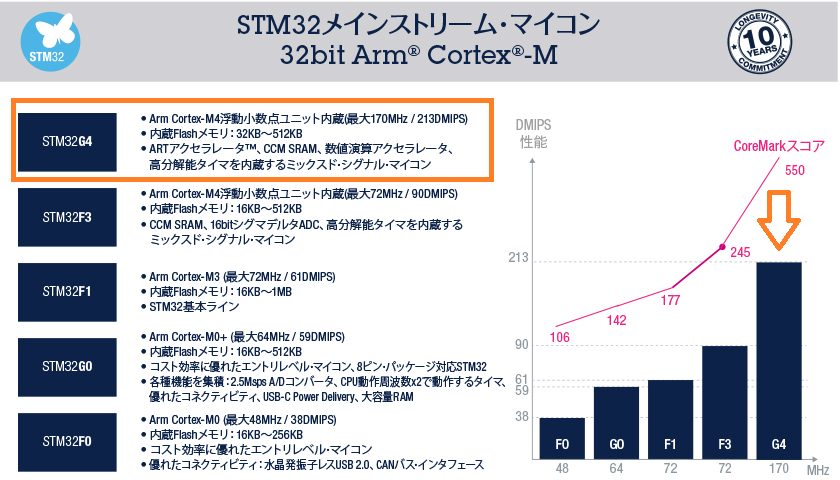
同様にIoT MCU顧客もセキュリティ対策コストを望むと思います。ちなみに、Cortex-M4比、Cortex-M33 TrustZone MCUは、2倍工数必要が弊社見解です(関連投稿:Cortex-M33とM0+/M4の差分の3章)。