お知らせ
弊社サイト:マイコンRTOS習得を2020年版へ改版しました。前稿までのFreeRTOSサンプルコード(1)~(5)結果を、2017年版へ反映させた結果です。是非、ご覧ください。
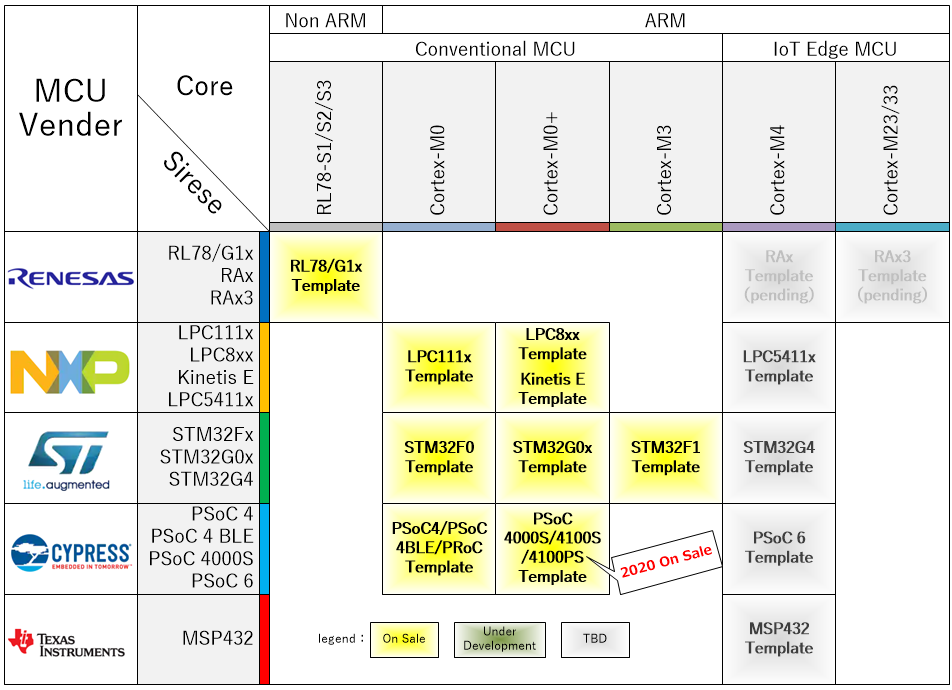
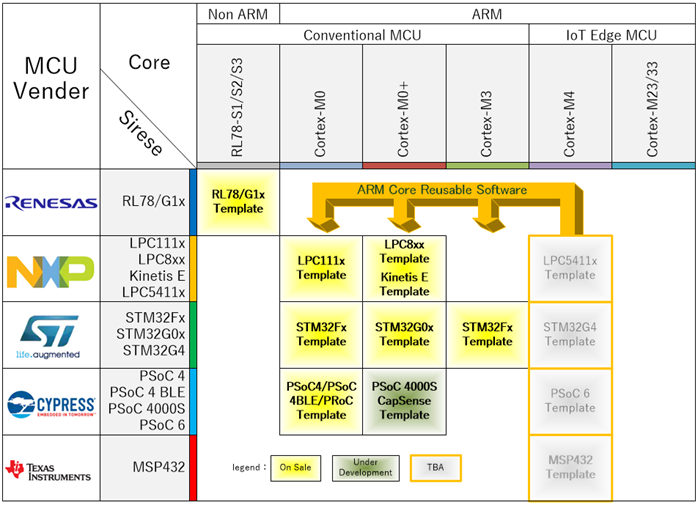
MCUベンダAPI生成ツール一覧
FreeRTOSサンプルコード(1)で予告したベンダ毎に異なるAPI生成ツールやその違い、サンプルコードとの関係を説明します。本ブロブ掲載MCUベンダ5社のAPI生成ツール一覧が下表です。
| ベンダ | API生成ツール | ブログ掲載MCU | API生成方法 |
| Runesas | CS+ | RL78/G1x | 個別ハードウェア設定 |
| NXP | SDK | LPC111x/LPC8xx/Kinetis E/LPC5411x | MCU設定 |
| STM | STM32CubeMX | STM32Fx/STM32Gx | 個別ハードウェア設定 |
| Cypress | PSoC Creator | PSoC4/PSoC4 BLE/PSoC4000/PSoC6 | 個別ハードウェア設定 |
| TI | CCS | STM432 | MCU設定 |
IDEとは別のAPI生成ツール専用名があり、ツール単独で更新するのが、NXP)SDK、STM)STM32CubeMXです。Runesas)CS+、Cypress)PSoC Creator、TI)CCSは、IDEにAPI生成ツールが組込まれていますので、IDE名称をAPI生成ツール欄に記載しています。
※CS+のAPI生成ツールは、単独でコード生成と呼ぶこともあります。
さて、これらAPI生成ツールには、2種類のAPI生成方法があります。
- MCU設定:利用MCUを設定し、内蔵ハードウェアAPIを一括生成…NXP)SDK、TI)CCS
- 個別ハードウェア設定:利用内蔵ハードウェアを個別設定し、APIを生成…Runesas)CS+、STM)STM32CubeMX、Cypress)PSoC Creator
MCU設定タイプのAPI生成ツールは、全内蔵ハードウェアAPIを、ユーザ利用の有無に係わらず一括生成するため、規模が大きく、SDK(Software Development Kit)などパッケージ化してIDEへ提供されます。但し、コンパイル時に利用ハードウェアのみをリンクしてMCUへダウンロードするので、少Flashサイズでも問題はありません。
MCU設定タイプの特徴は、例えば、UART速度設定などのハードウェア動作パラメタは、APIパラメタとしてMCUソースコードにユーザが記述します。
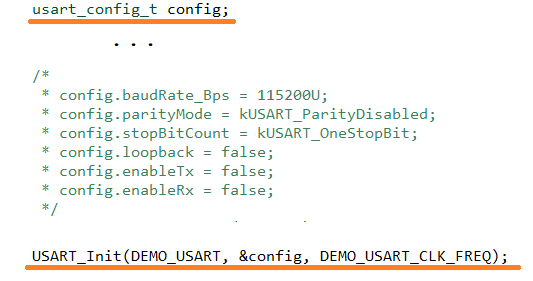
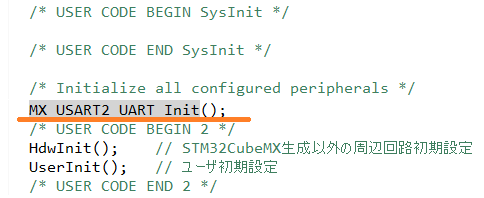
一方、個別ハードウェア設定タイプは、UARTなどのハードウェア動作パラメタは、API生成前にGUI(Graphical User Interface)で設定し、設定後にAPIを生成します。このためユーザが、MCUソースコードのAPIに動作パラメタを追記することはありません。
API生成ツール比較
MCU設定タイプのAPI生成ツールは、使い方がMCU設定のみで簡単です。また、ハードウェア動作パラメタがMCUソースコード内にあるため、動作変更や修正もIDE上で行えますが、人手によるバグ混入の可能性も高まります。
個別ハードウェアタイプAPI生成ツールは、MCUソースコード内のAPI記述が簡素です。生成されたAPI内部に動作パラメタが含まれているからです。但し、ハードウェア動作変更には、IDEから一旦API生成ツールに戻り、APIの再生成が必要です。この場合でも、MCUソースコードは不変ですので、GUI設定にミスが無ければバグ混入は少ないでしょう。
どちらにも、一長一短があります。敢えて分類すると、ソフトウェア開発者向きが、MCU設定タイプ、ハードウェア開発者向きでTP:Test Program応用も容易なのが、個別ハードウェア設定タイプです。
個別ハードウェア設定タイプであっても、Cypress)PSoC Creatorなどは、通常パラメタはBasicタブ、詳細パラメタはAdvanceタブで分け、誰でも設定を容易にしたツールもあります。
MCUソフトウェアは、C言語によるMCU API制御です。MCU API生成ツールの使い勝手が、ソフトウェア生産性の半分程度を占めていると個人的には思います。
サンプルコード/サンプルソフトウェア
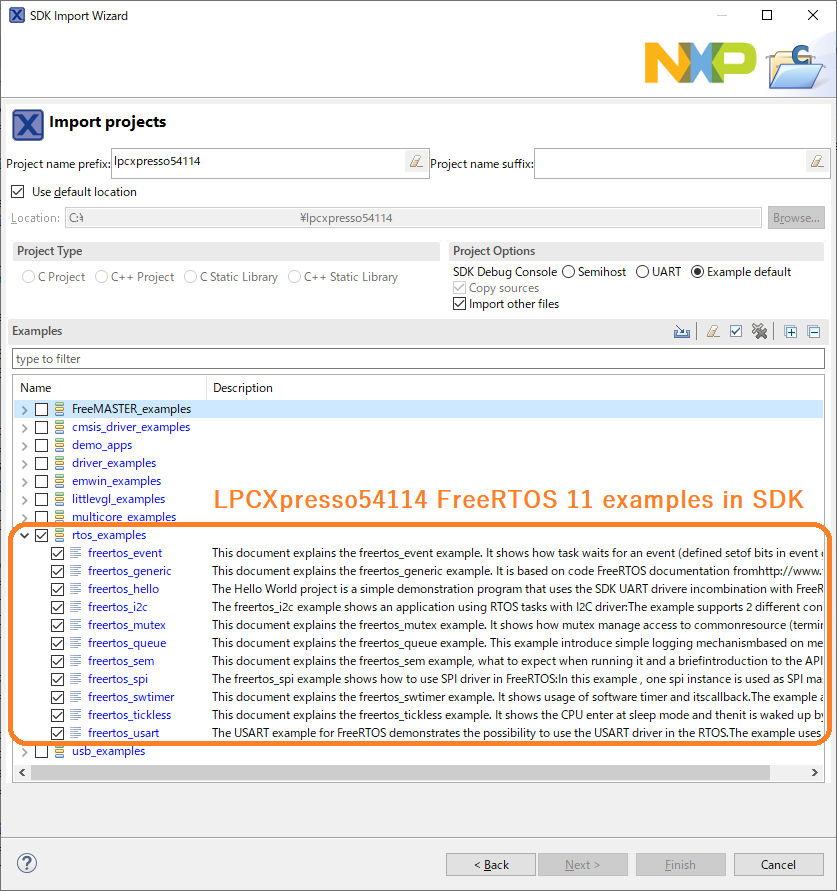
各社のサンプルコード/サンプルソフトウェアは、上記API生成ツールのMCUソースコード出力例です。
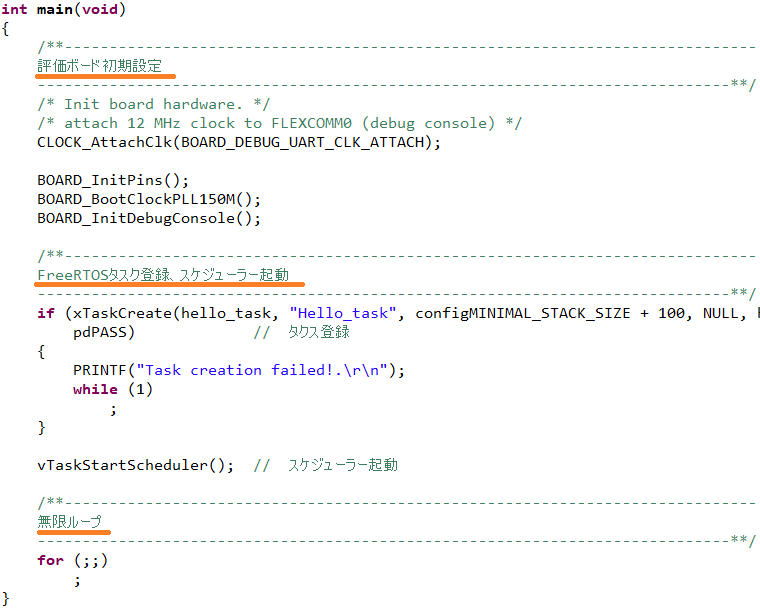
従って、サンプルコードには、出力例と明示的に判るよう多くのコメントが付加されています。初めてサンプルコードを見る開発者は、注意深くコメントを読んで、そのMCU開発の全体像を理解することが重要です。
全体像が理解済みであれば、より効率的な開発手法、例えば、(推薦はしませんが)個別ハードウェア設定タイプであっても、IDEからAPI生成ツールに戻らずに、直接MCUソースコードでハードウェア動作パラメタを変更するなどのトリッキーな使い方も可能です。
MCU開発とCOVID-19
新型コロナウイルス:COVID-19が世界的に流行しつつあり、工場閉鎖や物流への影響も出始めています。現状は治療薬が無いので、「個人の免疫力と体力」が生死の決め手です。
同時にMCU供給不足/停止など、開発への波及も懸念されます。これに対し「個人で第2のMCU開発力」を持つことが解決策を与えます。
本稿は、MCUベンダトップシェア5社のMCU API生成ツールを比較しました。MCUシェア、評価ボード価格や入手性、個人の好みなど、是非ご自分にあった比較項目で、現在利用中のMCUに代わる第2のMCU開発力を持つことをお勧めします。
第2のMCU開発力は、現行と視点が変わり利用中MCUスキルも同時に磨くことができ、様々な開発リスクに耐力(体力)が付きます。短期で効果的な第2のMCU開発力の取得に、弊社マイコンテンプレートがお役に立てると思います。