IoT MCUソフトウェア/ハードウェア開発者向け基本のキ、今回は、組込み処理の「ポーリング」、「割込み」、「低消費電力動作」とMCU開発の秘訣(コツ)を示します。ベアメタル開発でもRTOS開発でもこれらは同じです。これら基本を知ると、サンプルコードの読み方、利用法も解ります。
ポーリング と 割込み
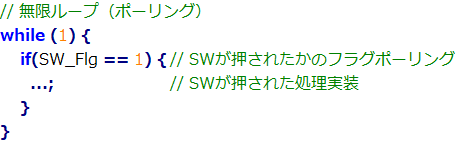
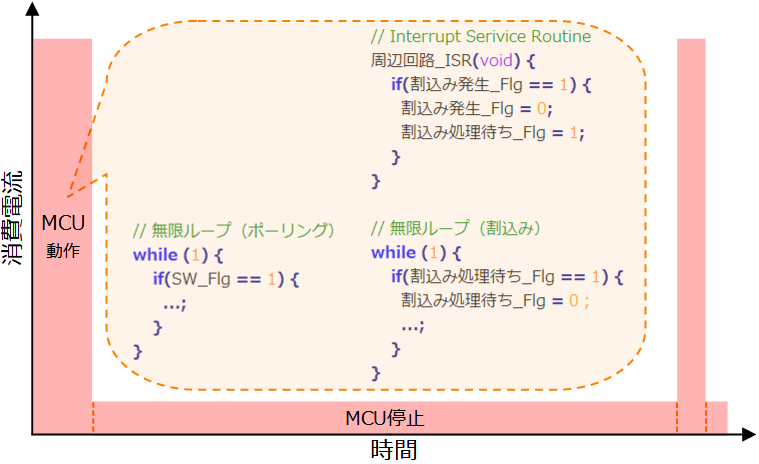
「ポーリング」とは、無限ループを周る度に例えばSWが押されたかどうかのフラグ相当をポーリング(polling)し、フラグが立ったら、その処理を実行することです。
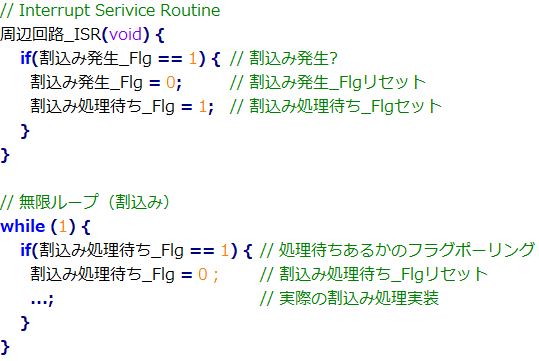
「割込み」は、割込み発生時に周辺回路が自動で呼出すISR(Interrupt Service Routine)を開発します。
ISRは、出来るだけ軽く(小さく)することが重要です。別周辺回路の割込みもできるだけ取込むためです。そこでISRでは、周辺回路が割込み発生時に立てた割込み発生フラグをリセット、このフラグとは別の割込み処理待ちフラグを立ててコード化するのが常套手段です。
この割込み処理待ちフラグを無限ループでポーリング、ブラグが立っていれば実際の割込み処理を実行します。
つまり、割込み処理の前段階にISRがあり、ポーリングのフラグ相当が割込み処理待ちフラグに変るだけ、結局、ポーリングに帰着します。
ベアメタル開発でもRTOS開発でも上記は同じです。RTOS時は、タスク間のセマフォ/Queueによる処理待ちが差分として追加されます(これら以外にも処理待ちはありますが、セマフォ/Queueで当面賄えます)。
低消費電力動作
無限ループをそのまま連続で回し続けると消費電力が増加します。そこで、間欠的にループを回し、ループを回さない時間は、最も電力を消費するMCUを停止するのが「低消費電力動作」です。
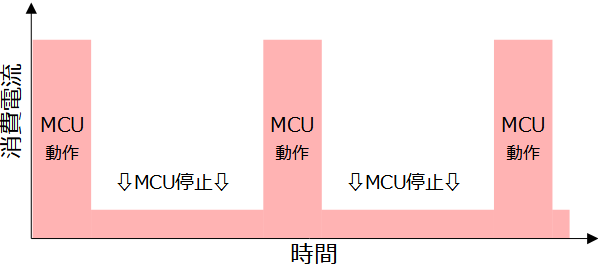
例えば1秒毎に1回ループを回すなど、低電力化を図りつつループ連続回しの時と大差なく処理する、つまり、どの程度間欠動作させるかが開発者の腕の見せ所です。
まとめ:ポーリング、割込み、低消費電力動作の3Tipsと開発秘訣
IoT MCUで開発するのは、MCUを含む周辺回路の初期設定と、無限ループ内の処理です。
初期設定とは、内蔵周辺回路を動作させるための設定です。周辺回路は、初期設定が終わると直に動作を開始します。そこでMCUは、動作中の周辺回路を監視し、必要に応じて処理を行います。このMCU監視が、無限ループ内の処理です。「組込み処理の中身」は、このように初期設定とループ内処理の2種類です。
初期設定の前にRAMクリアなどのスタートアップ処理もありますが、ここはIDEが自動生成し、通常、開発者が手を加えることは殆どありません。
初期設定は、サンプルコードの初期設定をそのまま流用する部分です。サンプルコードに使用例がない特殊(!?)な周辺回路の使い方をする時は、データシートやユーザマニュアルの当該周辺回路部分を熟読すればコード化できます。
次の開発部分が、無限ループ内です。ループ内処理をまとめた本稿の3Tipsが下記です
- 無限ループ内は、「ポーリング」か「割込み」のどちらか
- 割込みは、ISRで「割込み発生フラグ」を「割込み処理待ちフラグ」へ事前変換しポーリングへ帰着
- 無限ループの間欠動作と、間欠中のMCU停止が、「低消費電力動作」
組込み処理の中身とこれら3Tipsを知らずに組込み開発を始めるは、非効率です。中身と3Tipsを習得するには、紆余曲折、結構な時間と実務(失敗)経験が必要だからです。
例を挙げると、技術背景が少ない初心者にとっては、関連情報が多いため消化不良を起こします。また、初心者でなくても、開発自由度が高い(≒無いに等しい)ので、開発を上手く収束させには、Tipsやコツが必要になるなどです。
全てを網羅的に記述しているデータシートやユーザマニュアルは、既にこれらコツや技術背景を習得済みの中級者以上には役立ちますが、それ以外の人が読んでも実質の理解はできません。いきなり六法全書を読んで弁護士をする様なものです😂。
MCU開発の秘訣(コツ)は、先ず、3Tipsを基にプロトタイプを開発し、次に、実際に動作するプロトタイプを使って、開発自由度の高さを活かし動作チューニングすることです。
実働プロトタイプがあれば、データシート実質理解も進みますし、チューニング結果で変な動作になっても元のプロトタイプへ戻れますので、安心して色々な試行錯誤ができ、開発者スキルアップも容易です。
サンプルコード利用法
主要MCUベンダは、多くのサンプルコードを提供中です。
サンプルコードの目的は、“1つ”の周辺回路の基本動作を解り易く示すことです。基本動作は、初期設定と無限ループ内の2つに分けて読みます。無限ループ内は、Tips1/2から処理内容が理解できます。割込みの時は、ISRがあります。
初期設定は、開発に使う使用例と同じかどうかを添付コメントなどから判断します。使用例が同じ、または、近いなら、そのままコピーして流用します。内容を理解したい時は、”その周辺回路のデータシートのみ”を読めば十分です。
もちろん、サンプルコード無限ループ内のポーリング/割込み処理もそのままコピーして流用可能です。
但し、サンプルコードは、一般的にTips3:低消費電力動作への配慮がありません。また、サンプルコードを、“複数”集めて動作させる作り方ではありません。1周辺回路の動作コードを、シンプルに解り易く示すためです。
弊社マイコンテンプレートは、複数サンプルコードを利用する仕組みを予め持っています。また、無限ループの間欠動作と停止MCUを復帰させる仕組みも、テンプレートへ組込み済みです。
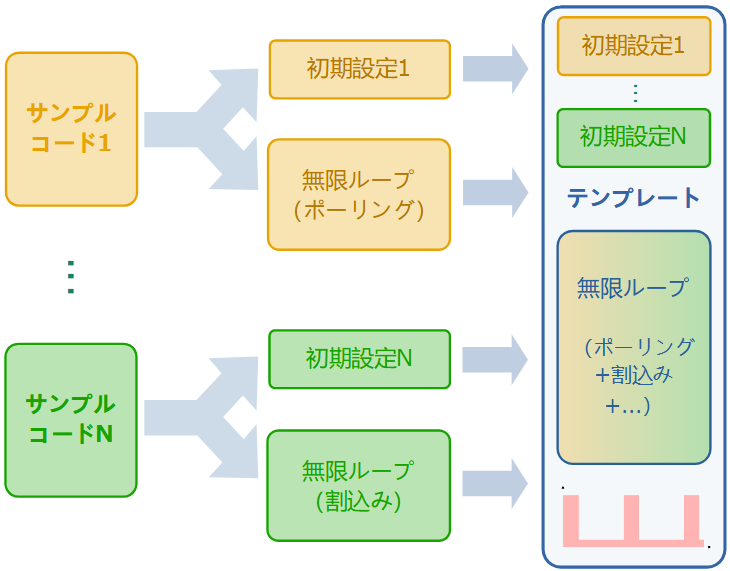
つまり、初めから複数サンプルコードの活用・流用が即座に出来るようテンプレート化、主要ベンダの汎用MCUに対応し、適用例と詳しい説明資料付き(一部ダウンロード可)で販売中です(ベアメタル開発用:1000円、RTOS開発用:2000円、テンプレート一覧と価格はコチラ)。
本稿3Tipsを知っていれば、サンプルコードを分析しながら読むことができ、必要に応じて各部分を自分のソフトウェアや弊社テンプレートへ組込むことも可能です。
プロトタイプ開発に最適なのが、弊社テンプレートです。テンプレートを使って早期にプロトタイプ開発を実現すれば、開発者の効率的スキルアップ、要求仕様に対するMCU性能過不足なども明らかとなり、お役に立てると思います。
テンプレートご購入、お待ちしております。