経産省が2021年6月4日に発表した「半導体・デジタル産業戦略」について、専門家の評価は悲観的です。
我々IoT MCU開発者は、ホノルル便パイロットを見習い、対応策を持つべきだと思います。
経産省半導体・デジタル戦略の評価
今こそ日本の大手電機各社は半導体技術の重要性に気付くべき、EE Times Japan、2021年6月15日
日本の半導体戦略は“絵に描いた餅”、TechFactory、2021年6月16日
日本の半導体ブームは“偽物”、再生には学校教育の改革が必要だ、EE Times Japan、2021年6月22日
専門家が日本政府や経産省の方針を批判するのは、コロナ対策と同様、当然です。また下記、英)Financial Times評価を紹介した記事からも、専門家評価と同様、概ね懐疑的であることが判ります。
半導体製造業の日本の取組みに対する海外メディア評価、Gigazine、2021年7月6日
この戦略結果として生じる半導体・デジタル産業の市場変化の影響を直接受けるのは、我々IoT MCU開発者です。しかも、結果がでるまでの時間は、ますます短くなっています。この分野が、自動車や次世代通信などを含む「全ての産業の要」だからです。
経産省戦略資料は、コチラからダウンロードできます。概要・概略だけでも相当な量があり、対象がMCU技術者ならまだしも、マネジメントや一般技術者が、本当に要点を把握できるか、筆者でも疑問に感じます。
ホノルル便緊急事態対策
かつて護送船団方式ともいわれた日本産業の舵取りは、成功もありますが失敗も多いです。同調圧力に弱い日本人には、この方式が向いていたのかもしれません。
問題は、舵取りの結果生じる市場変化に、どう対応するかです。
対応策ヒントの1つになるのが下記記事です。
太平洋の真ん中でエンジン停止したらどうなるか、東洋経済、2021年6月27日
パイロットは、太平洋上での緊急事態対応のため、60分毎に東京/ミッドウェー/ホノルルの天候情報を集め、燃料残量や対地速度などの機体状況を確認し、180分以内に着陸できる空港を検討するのです。しかも、この緊急事態は、パイロットが入社し定年退職するまでに一度も経験することの無い0.024%の発生確率でもです。

この東京~ホノルル便エンジン停止などの緊急事態発生確率に比べると、半導体・デジタル産業の国による舵取り失敗確率は、高いと思います。
我々MCU開発者も、ホノルル便パイロット並みとはいかなくても、せめて開発が一段落付く毎に、最新IoT MCU状況を確認し対応を検討することは重要です。一段落が付いた時は、開発に使ったMCUの利点欠点を把握直後なので、他MCUとの比較も精度良くできるからです。
この検討結果をどのように反映するかは、開発者次第です。
お勧めは、もしもの時の「第2候補IoT MCU案:Plan Bを、開発者個人で持つこと」です。Plan Bは、たとえ同じARM Cortex-Mコア利用であっても、ベンダ毎に手間やAPIが異なるIoT MCU開発に、心理的余裕を与えます。Non ARMコア利用ならなおさらです。
個人でなら、同調圧力に関係なく、自分の開発経験や勘を使ってPlan Bを検討できます。
まとめ
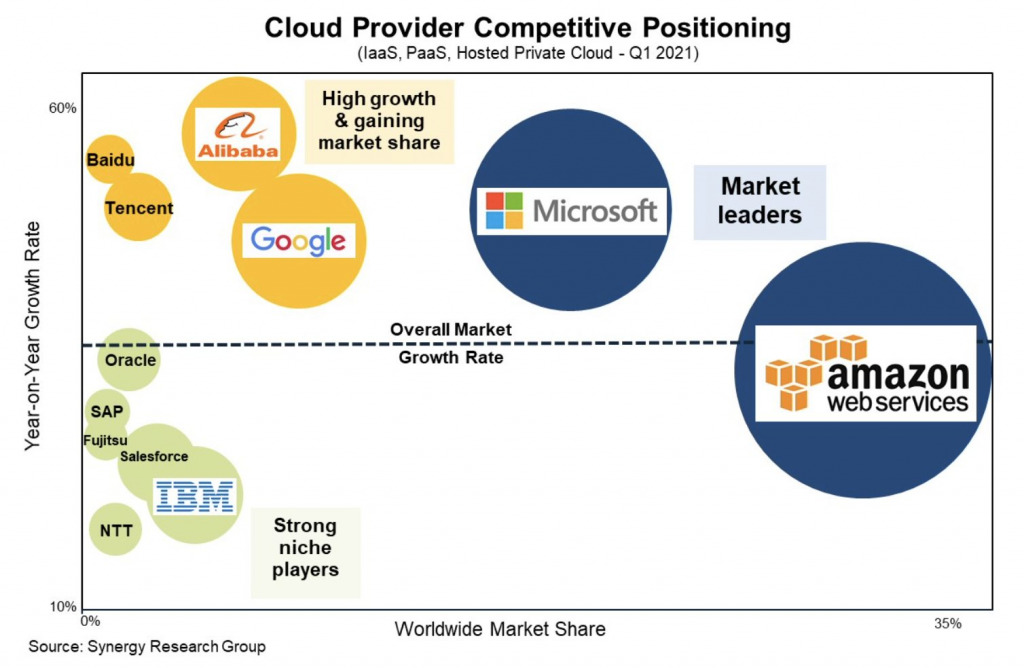
2021年6月経産省が発表した半導体・デジタル産業戦略の専門家評価は、悲観的です。国の舵取りが失敗した例は、過去の電機や半導体企業の衰退が物語っています。巨額投資と市場シェアの両方が必要な半導体・デジタル分野は、既に弱体化した国内企業の巻返しにも期待はできません。
舵取り失敗確率は、現役ホノルル便パイロットが、太平洋上で緊急事態に出会う確率よりも高いでしょう。
最先端デバイスを利用するIoT MCU開発者の対応策の1つは、開発が一段落付く毎に、最新半導体・デジタル市場を確認し、もしもの時の第2 IoT MCU利用案:Plan Bを開発者個人で持つことです。
個人で安価にPlan Bを持つため、評価ボード動作確認済み各種マイコンテンプレートはお役に立てると思います。関連投稿:半導体不足とMCU開発案に、Plan B構成案もあります。