昨年2021年のMCUサプライヤトップ5が、2022年6月21日のTech+記事に示されました。
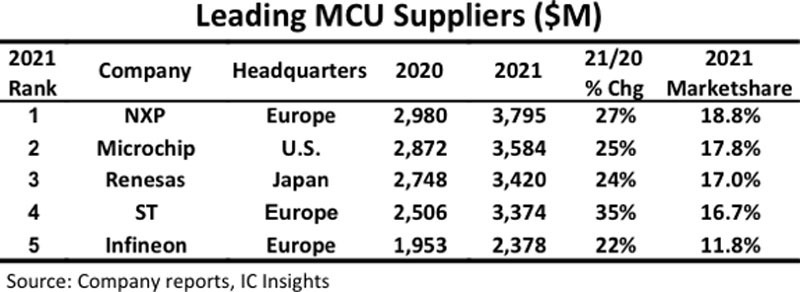 2021年MCUサプライヤシェア(出展:記事)
2021年MCUサプライヤシェア(出展:記事)
NXP、STマイクロ、Infineon(旧Cypress)など弊社ブログもカバーする欧州3サプライヤが強く、米国マイクロチップ2位、日本ルネサス3位、これら上位5社で82.1%のMCUシェアを独占します。
記事によると、トップ5独占率は、増加中だそうです。
半導体は国家
今年2022年2月に始まったロジアのウクライナ侵略が、半導体ビジネスにどう影響するかのMassa POP Izumida氏の考察が、コチラの記事にあります。
記事を引用すると、“限られた企業のみが先端半導体製品や製造装置を作れ、半導体が戦略物資、国家の運命を左右する”、つまり「半導体は国家なり」です。納得できますね。
日本開発者は多様性
激変する半導体ビジネスで日本人開発者が生き残るには、得意の協調性だけでなく、多様性が必要だと思います。変化しつつある状況を把握し、「個人レベル」で少し先を見据えた行動指針を持つことです。
半導体は国家の著者:Izumida氏が、ARM、RISC-Vのプロセサ潮流を考察しています。MCUの少し先を考えるのにも役立つと思います。もちろん、1指針だけでなく、第2第3の予備指針を持つことも良いでしょう。※本ブログ2021年最後の傾向と対策:日本低下でも、Izumida氏の記事が読めます。
ポイントは、多様性実現へ開発視野を広くしておくことです。
MCU開発中は、視野狭窄に陥りがちです。対策は、開発中に狭まった視野を、意識して自ら時々広げる習慣を持つことです。激変半導体業界でMCU開発者自身のサスティナビリティ(持続可能性)検討は、納期を守ることと同じぐらい重要な事だと思います。
2022ウクライナ侵略影響
ロシアでは、Windows 10とWindows 11ダウンロードが遮断されました。
欧米のウクライナ侵略への報復は、テクノロジーへも及び始めました。Windows以外にも様々な欧米製ツールが、製品開発には必要です。例え半導体を製造できても、その半導体を使う新製品が開発できなければ、本末転倒です。
テクノロジー遮断は、開発者のやる気や元気を無くすのに効果的です。
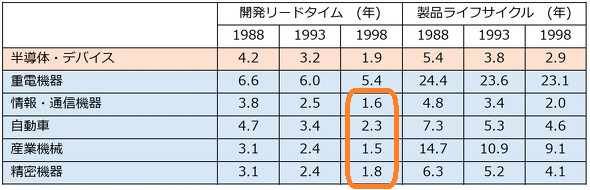
今回の侵略影響を注視している中国や欧米各国自身も、テクノロジー鎖国化・保守化傾向へバイアスが掛かる気がします。また、より強い開発者育成にも積極的になるでしょう。逆に、1998年以来、約24年ぶりの円安影響を受ける日本企業は、開発者育成などの人的先行投資は、後回し傾向がより強まると思います。
侵略は、極東アジアG7参加国日本が、ビジネスや金融など多くの点で「西側欧米各国とは異質の国であること」を、際立たせる結果を生んでいます。
まとめ
日本国内は、災害級の酷暑です。熱中症対策エアコン、節電対策、コロナ対策マスク、これら3対応が上手くできるでしょうか?
政府やマスコミは、「優先度を付けて」と言います。“優先度”は、各個人で異なります。しかし、日本人は、本来個人主体で決めるべき優先度を、他人と比べ決める傾向が強い民族です。先ず、他人ありきです。日本国内では、これでも良いでしょう。
しかしながら日本開発者は、世界の中で生きていきます。
異質の日本、視野を世界へと広くし、自分で自分を育成していくしか生き残り方法はない状況だと分析します。いかがでしょうか?
日本開発者の英語対策(7月3日追記)
2022年6月29日、経済産業省所管の日本IT国家戦略を技術面・人材面から支援する独立行政法人:情報処理推進機構IPAが、セキュリティエンジニア向け英語教材2点を発行しました。MCU開発者にも役立つ資料ですので紹介します。
英語Reading
セキュリティエンジニアのためのEnglish Reading、これは、英文読解力や英文情報収集力を高めるTips集で、「楽に」「上手く」英文を読む方法が記載されています。
セキュティ英単語集、こちらは、ポイントとなる頻出330英単語の、和訳を示しています。
どちらも形容詞の “セキュリティ” が付いていますが、普通のエンジニア向け資料です(というか、セキュリティ関連のAcronyms:略語集ではありません)。
両資料に目を通しておくと、「あらゆる英文」から効率的、効果的に情報収集が出来そうです!
英語Listening
2022年6月29日、日本ニューズウィークに中学英語をしっかりモノにすれば必ず話せるが掲載されました。英会話の大前提、「大事なことは最初」、「説明や細かいことは後」、が判ります。
英会話の冒頭部分に集中してListeningすれば、おおよその内容が把握できそうです!
日本開発者の英語
 日本開発者の英語ハードル
日本開発者の英語ハードル
英語Readingやウェビナー英語Listeningは、日本人開発者最初のハードルです。しかし、ハードルは倒したとしても、早く走れればOKです。上記の資料、記事は、ハードルの倒し方、上手く早く走るテクニックを解りやすく示しています。
日本人開発者の視野を世界へ広くするには、英語ReadingとListeningは必須です。
クラウド環境進歩で、AI自動翻訳なども期待できますが、ピュアな世界情報に触れるには、原文(英語)から直接内容を理解する方が、脳にとっても良いハズです。
残りの英語Writingは、PCやクラウドの自動翻訳をどんどん使っても良さそうです!
あとがき
最初のEnglish Reading資料にあるように、英語情報は、12億人のため、日本語情報の1.2憶人の10倍です。デマや誤報などの内容妥当性にも注意が必要とあります。納得できます。
人口減少の日本と英語圏との知的情報差は、今後さらに広がります😭。
第2言語、技術者スキルとしての英語、必要性は高まるばかりです。少し長めですが貴重な “日本語表記” の資料、是非目を通してください。

 2022年11月11日、
2022年11月11日、