弊社FreeRTOS習得ページで使う評価ボード:LPCXpresso54114(Cortex-M4/100MHz、256KB Flash、192KB RAM)は、FreeRTOSだけでなく、Mbed OSやZephyr OSなどオープンソース組込みRTOSにも対応しています。多くの情報がありRTOSを学ぶには適した評価ボードだと思います。
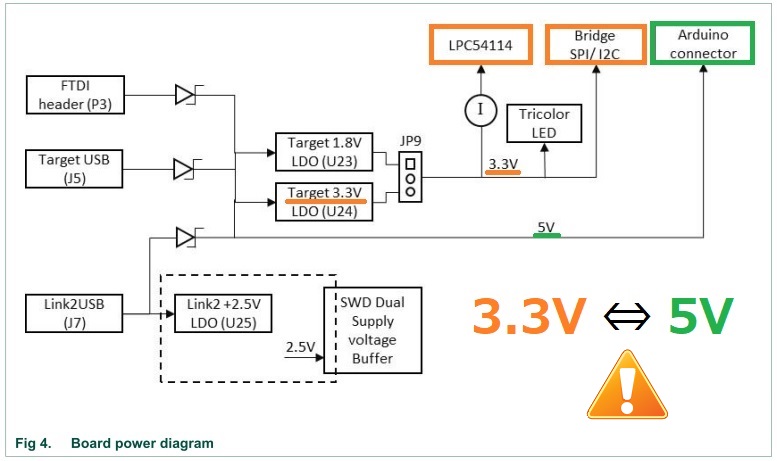
さて、このLPCXpresso54114の電圧ブロック図が上図です。MCUはデフォルト3.3V動作、低電力動作用に1.8Vも選択可能です。一方、Arduinoコネクタへは、常時5Vが供給されます。
本稿は、このMCU動作電圧とArduinoコネクタに接続するセンサなどの動作電圧が異なっても制御できる仕組みを、ソフトウェア開発者向けに説明します。
MCU動作電圧
高速化や低電力化の市場要求に沿うようにMCU動作電圧は、3.3V → 3.0V → 2.4V → 1.8Vと低下しつつあります。同時にMCUに接続するセンサやLCDなどの被制御デバイスも、低電圧化しています。しかし、多くの被制御デバイスは、未だに5V動作が多く、しかも低電圧デバイスに比べ安価です。
例えば、5V動作HD44780コンパチブルLCDは1個500円、同じ仕様で3.3V動作版になると1個550円などです。※弊社マイコンテンプレートに使用中のmbed-Xpresso Baseboardには、5V HD44780コンパチブルLCDが搭載されています。
レベルシフタ
異なる動作電圧デバイス間の最も基本的な接続が、間にレベルシフタを入れる方法です。
TI)TXS0108E:8ビットレベルシフタモジュールの例で示します。低圧A側が1.8V、高圧B側が3.3Vの動作図です。A側のH/L電圧(赤)が、B側のH/L電圧(緑)へ変換されます(双方向なので、B側からA側への変換も可能です)。
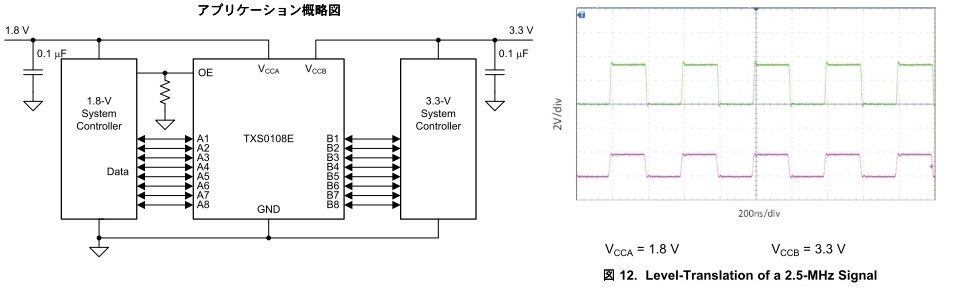
レベルシフタ利用時には、電圧レベルの変換だけでなく、データレート(スピード)も重要です。十分なデータレートがあれば、1.8VのH/L波形は、そのまま3.3VのH/L波形へ変換されますが、データレートが遅いと波形が崩れ、送り側のH/L信号が受け側へ正確に伝わりません。
例えば、LCD制御は、複数のLCDコマンドをMCUからLCDへ送信して行われます。データレートが遅い場合には、コマンドが正しく伝わらず制御ができなくなります。
MCUの5V耐圧ピン:5V Tolerant MCU Pad
LPCXpresso54114のGPIOピンには、5V耐圧という属性があります。PIO0_0の[2]が5V耐圧を示しています。
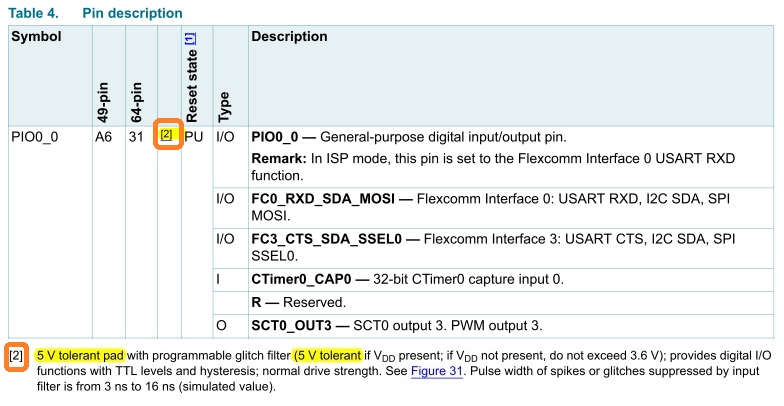
5V耐圧を簡単に説明すると、「動作電圧が3.3/1.8V MCUのPIO0_0に、5Vデバイスをレベルシフタは使わずに直接接続しても、H/L信号がデバイスへ送受信できる」ということです。または、「PIO0_0に、1ビットの5Vレベルシフタ内蔵」と解釈しても良いと思います。
※ハードウェア担当者からはクレームが来そうな説明ですが、ソフトウェア開発者向けの簡単説明です。クレームの内容は、ソフトウェア担当の同僚へ解説してください😌。
全てのGPIOピンが5V耐圧では無い点には、注意が必要です。但し、ArduinoコネクタのGPIOピンは、5V耐圧を持つものが多いハズです。接続先デバイスが5V動作の可能性があるからです。
また、I2C/SPIバスで接続するデバイスもあります。この場合でも、MCU側のI2C/SPI電圧レベルとデバイス側のI2C/SPI電圧レベルが異なる場合には、レベルシフタが必要です。MCU側I2C/SPIポートに5V耐圧属性がある場合には、GPIO同様直接接続も可能です。
I2Cバスは、SDA/SCLの2本制御(SPIなら3本)でGPIOに比べMCU使用ピン数が少ないメリットがあります。しかし、その代わりに通信速度が400KHzなど高速になるのでデータレートへの注意が必要です。
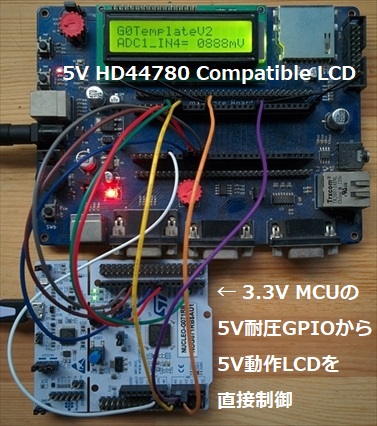
LPCXpresso54114以外にも5V耐圧ピンを持つMCUは、各社から発売中です。ちなみに、マイコンテンプレート適用のMCUは、6本の5V耐圧GPIOを使ってmbed-Xpresso Baseboard搭載5V LCDを直接制御しています。
5V耐圧MCUデータシート確認方法
MCUのGPIOやI2C/SPIを使って外部センサやLCDなどのデバイスを制御する場合、下記項目を確認する必要があります。
- MCU動作電圧と被制御デバイス動作電圧は同じか?
- MCU動作電圧と被制御デバイス動作電圧が異なる場合、外付けレベルシフタを用いるか、またはMCU内蔵5V耐圧ピンを用いるか?
- MCU内蔵5V耐圧GPIOやI2C/SPIを利用する場合、そのデータレートは、制御に十分高速か?
5V耐圧ピンは、使用するMCU毎に仕様が異なります。MCUデータシートは、英語版なら「tolerant」、日本語版なら「耐圧」で検索すると内容確認が素早くできます👍。
MCU動作電圧と接続デバイス動作電圧が異なっても、MCUのH/L信号が被制御デバイスへ正しく伝わればデバイスを制御できます。
MCU動作電圧に合わせたデバイス選定やレベルシフタ追加ならば話は簡単ですが、トータルコストや将来の拡張性などを検討し、5V耐圧ピンの活用も良いと思います。