マイコン開発には、各社が低価格で提供している評価ボードは必須です。
採算度外視の低価格、高信頼ハードウエア ソフト開発者に「確実に動くハードウエア」を「低価格」で提供する、これが評価ボードです。
マイコン開発には、「専用」のソフトウエアと「専用」のハードウエアの両方が必要です。そして片方のデバッグには、もう片方にバグが無いことが必須です。つまり、ソフトデバッグには、バグなしのハードが必須なのです。そこで、バグなしで確実に動作する「汎用」ハード、これが各ベンダ提供の評価ボードです。
但し、専用ハードがいずれ開発されるので、汎用の評価ボードは低価格とならざるをえない運命です。高ければ誰も買ってくれないからです。しかし開発者にとっては、以下のように優れた教材と言えます。
ソフト開発者が、専用ハードが出来上がる前にソフトデバッグ可能な環境を自由に構築できる
ハード開発者が、そのまま専用ハードにも使える高信頼ハード設計を学べる
マイコン初心~中級者が、ベンダ標準のデバッグ技術で低価格な開発環境を使って自習できる
評価ボードは、各ベンダフォーラムで多くの情報が記載されており、適用サンプルソフトも多い
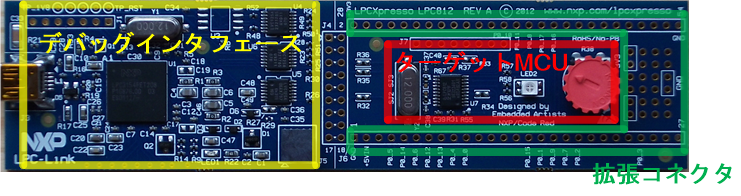
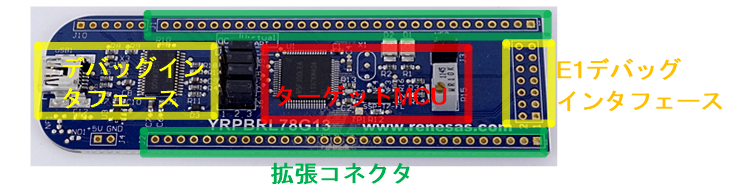
ターゲットMCU、デバッグインタフェース、拡張コネクタの3構成 評価ボードは、ターゲットMCU、デバッグインタフェース、拡張コネクタの3つから構成されます。
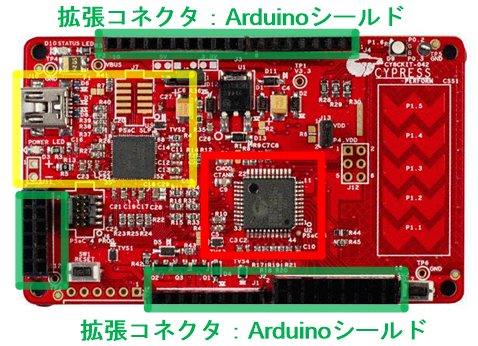
NXPの評価ボード:LPCXpresso LPC812とルネサスのRL78G13-Stick、CypressのCY8CKIT-042 の例を示します。
NXP LPCXpresso LPC812構成 Runesus RL78G13-Stick構成 Cypress CY8CKIT-042構成 ターゲットMCU
ターゲットMCUとは、開発MCUそのものの部分です。残りのデバッグインタフェースと拡張コネクタは、ターゲットMCUが異なっても同一です。
拡張コネクタ
最近はArduino用シールドコネクタを拡張コネクタに用いる評価ボードが多いです。これは、市販Arduinoシールドの種類が増えたため、上手く探せれば汎用の評価ボードに複数のArduinoシールドを拡張コネクタで接続し、専用ハードに近い、いわば「疑似専用ハード」を市販品のみで作れます。ボード単位のハード部品化がもたらした結果と言えます。
個人的には、シールドよりも、mbed – Xpresso Baseboard の方がより低コストで疑似専用ハード実現ができると思っています(こちら に詳しく記載しました)。
デバッグインタフェース
デバッグインタフェースは、IDEデバッグ機能を使うために必要な部分で、ターゲットMCUのシリアル入出力とパソコンUSBを変換する機能もここに含みます。この機能専用のマイコンが実装されることが多くなりました。このマイコンでデバッガ機能も代行するので、別途デバッガを購入せずにソフトデバッグが可能です。
MCUがARM Cortex-M0/M0+の場合には、ARM標準のCMSIS-DAPでMPUコアをデバッグできるインタフェースも実装されます。CMSIS-DAPはこちらの記事 も参照してください。
CMSIS-DAPは、ターゲットMCUとデバッグインタフェースを切り離した後に、ソフトデバッグする時、別途ARM専用デバッガが必要ですが使えます。このように、1つの評価ボードで複数のデバッグ方法が使えるのも特徴です。
ARM系コアの場合は、ベンダ評価ボードもほぼ同じ構成で、ARM専用デバッガを1台持っていれば、ベンダ各社の評価ボードをまたがっても使えるのがメリットです。マイコン開発のデファクトスタンダートになりつつあります。
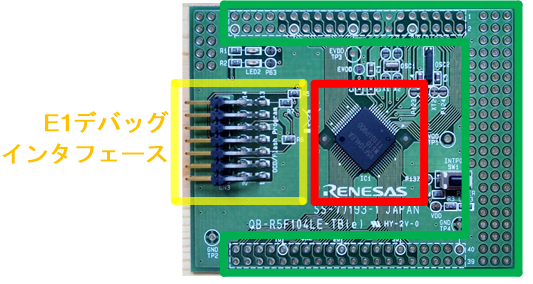
一方、デバッグインタフェースをE1コネクタでしか持たないルネサスのCPUボードをデバッグする際は、別途E1デバッガを接続しないとデバッグができません。この点は、Cortex-M0/M0+コアのMCUと比べるとコスト的に劣ると言えるでしょう。
Runesus QB-R5F104LE-TB構成 デバッガ機能なしの統合開発環境:IDEの背景 シールドなどのボード単位の部品化が進んだ結果、専用ハードは、もはや既存ハードを組み合わせて、その小型化のみを行う設計、つまり専用基板化が主な開発内容と言えるかもしれません。
同様に、ソフト開発もベンダが、多くのライブラリを提供することで、専用ソフトをライブラリの組合せで完成できるレベルを目指しているようです。IDEにデバッガ機能がないArduino IDEなどは、この現れのような気がします。
ハードとソフトのオープンソース ハード版オープンソースとしてArduinoシールドコネクタを持つ既成基板は、増えつつあります。
オープンソースを活用したソフト開発は、Unix系では当たり前です。この流れがマイコンソフトへも徐々に浸透する可能性を感じています。この場合、ハードの専用基板化開発に相当するのは、RTOS適用や弊社のマイコンテンプレート になるかもしれません。