IoV:Internet of VehiclesやV2X:Vehicles-to-Everything通信により、車載半導体チップとソフトウェア需要が指数関数的に増加、ユーザの自動車選択基準が、エンジンなどのメカから車載ソフトウェアへ移行しつつある、という記事がEE Timesに記載されました。
これらIoV状況が、IoTへ与える影響について考えてみました。
IoVとIoT
車のカタログから、エンジン特性や足回りのメカ説明が消え、スマホ連動性や運転支援など車載ソフトウェアによるサービスの説明に変ったのはここ数年です。記事によると、車の新しいユーザ選択基準になりつつあるカーエレクトロニクスが、半導体業界にとってはスマホ以来の最大チャンスだそうです。
また、「CASE」で車載半導体はどう変わるのか(2021年9月15日、EE Times Japan)でも、自動運転と電動化が今後の車載半導体動向を左右すると結論付けています。
※CASE:Connected(通信機能)、Autonomous(自動運転)、Shared&Services(共有化/サービス化)、Electric(電動化)
年々向上するユーザのソフトウェア指向を満たす車載IoV業界、COVID-19の影響で停滞気味の民生IoT業界とは雲泥の差です。
車載半導体需要予測は初めの記事数値を参照して頂くとして、両記事のポイントは、ソフトウェア差別化や付加価値追加には、カスタムチップまたは、IP(Intellectual Property)などの組込みハードウェアが効果的という点です。これらIPには、セキュリティやエッジAIなどIoTへ流用できるものが数多くあります。
従って、IoVは、結果としてIoTも牽引すると思います。
但し、世界的半導体不足が続く状況では、優先度、調達コスト、多くの数量が確実に見込めるIoVが優勢、IoTはこの影響で、しばらくチップ供給不足や停滞が続くでしょう。
停滞気味のIoT側開発者として今できることは、IoV同様、IoTソフトウェア差別化に備えることだと思います。
IoT MCUのTrustZone、SOTB
IoTの観点から、IoTソフトウェア差別化や付加価値追加のための組込みIPと言えば、ARM TrustZone内蔵Cortex-M33コア、ルネサスの新製造プロセスSOTB:Silicon On Thin Buried Oxideなどが相当します。
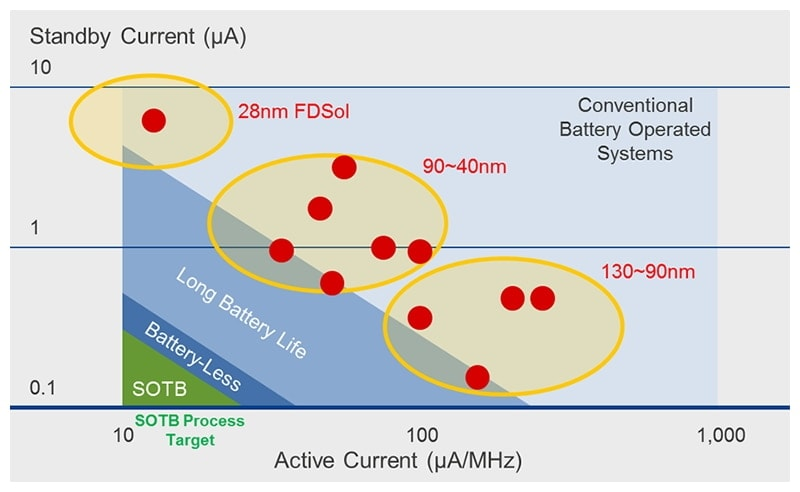
例えば、TrustZoneが、高いセキュリティ効果を発揮するのはご存知の通りですし、SOTB製Cortex-M0+搭載ルネサスREファミリは、超低スタンバイ電流により太陽光発電環境などのエナジーハーベストでも電池交換不要を実現するなどです。
SOTBは、超低消費電力動作と高速動作を両立する革新的製造プロセスです。全てのルネサスMCUへ採用すれば強力な差別化技術になると思いますが、今のところ出し惜しみなのか(!?)戦略的なのか、REファミリにのみ採用中です。
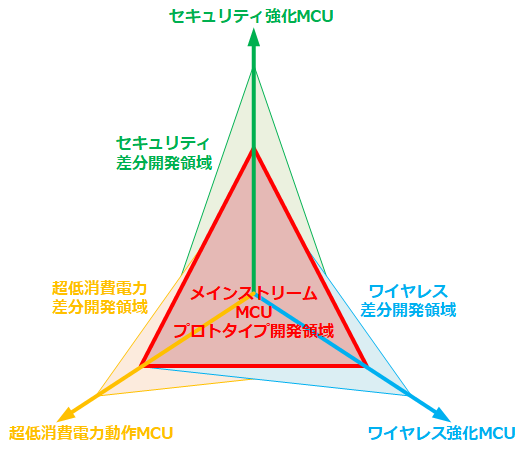
一見、ASSP:Application Specific Standard Produceのようですが、これら差別化技術は、汎用MCUに採用された時に最も効果を発揮します。
従来のエッジMCUでの単純なアナログデジタル変換に加え、セキュリティや超低電力動作などのIoT化に伴う付加機能がIoT MCUには必須です。IoT付加機能内蔵MCUが、汎用IoT MCUになります。
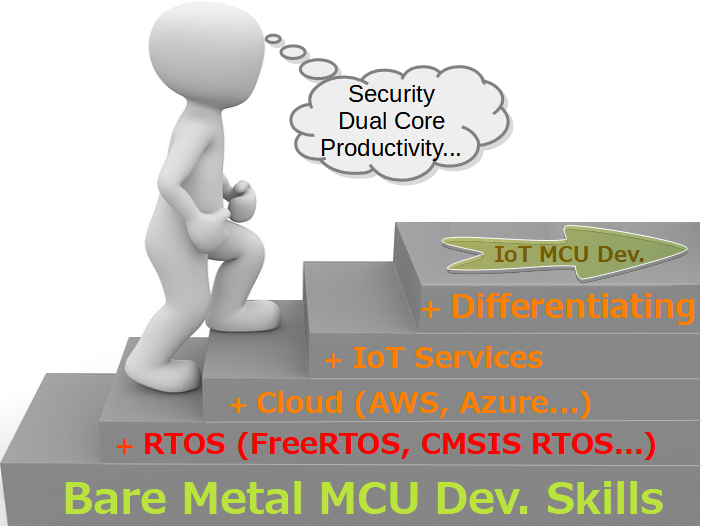
IoT開発者は、これらIoT付加技術を今のうちに習得しておくことが必要です。
IoVとIoTの最も大きな差は、車載と民生半導体の電源仕様でしょう。IoVは、EV(Electric Vehicle)のモータ高出力要求に伴いバッテリーが12V供給から48Vへ高電圧化しつつあり、万一の耐圧やフェイルセーフが求められます。IoTは、低電圧(≦3.3V)電源で低圧化しつつあります。
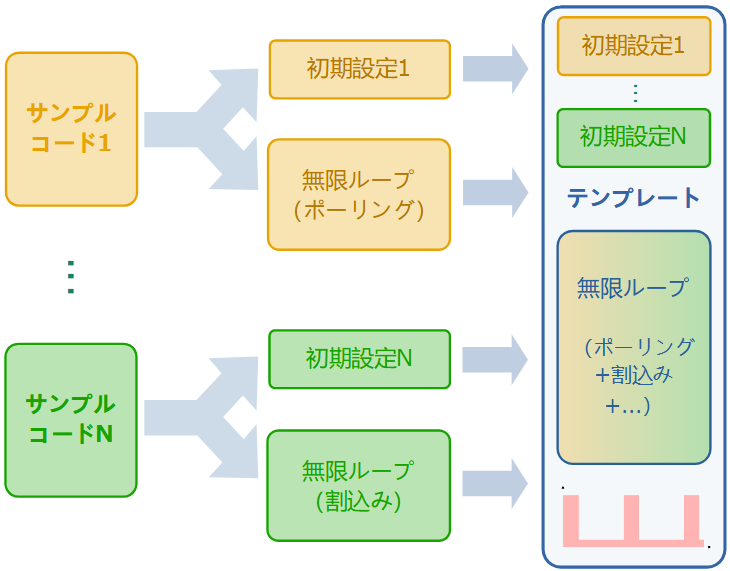
RA/REテンプレート構想
残念ながらSOTB製REファミリ評価ボードは、まだ値段が高く、個人レベルでは手が出しにくい状況です。そこで、SOTBプロセスではありませんが、REファミリとソフトウェア互換性があると思われるCortex-M33コア搭載ルネサスRAファミリを、弊社テンプレート対象にと考えています。
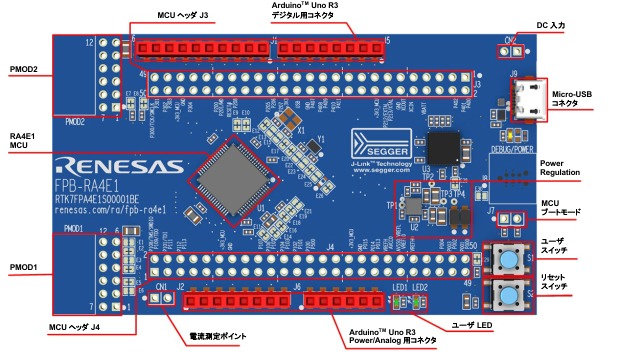
RAファミリは、TrustZoneでIoTセキュリティへ対応しています。また、9月22日発売のRAファミリRA4E1グループの評価ボード:RA4E1 Fast Prototype Boardは、20米ドル台と低価格です。ルネサス独自コアではないため、コンパイラFlash容量制限もありません。
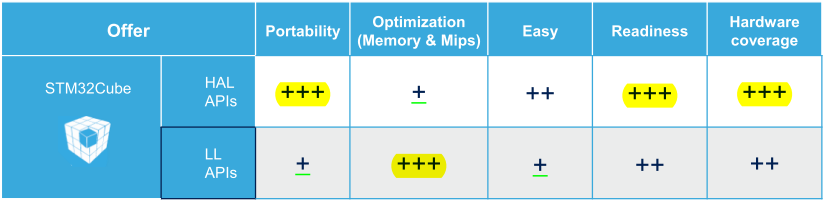
RL78/G1xテンプレートから新しいルネサスMCUをテンプレート対象に出来なかった理由の1つが、この容量制限です。ARMコア他社同様、GNUまたはARM Compiler V6が、e2 studioでRAファミリ開発に無償で使えます。
今のところRAテンプレートは、REへも使えると考えています。ARMコア差は、CMSIS:Cortex Microcontroller System Interface Standard やHAL:Hardware Abstraction Layerで吸収できるハズだからです。
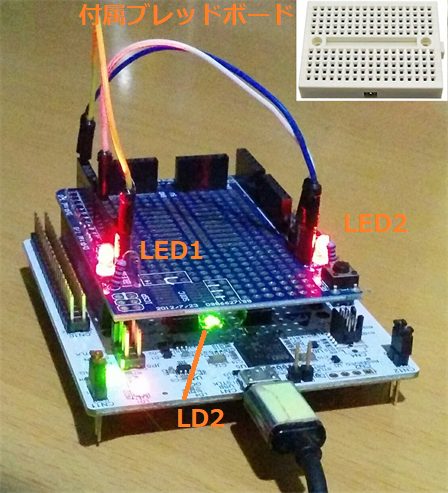
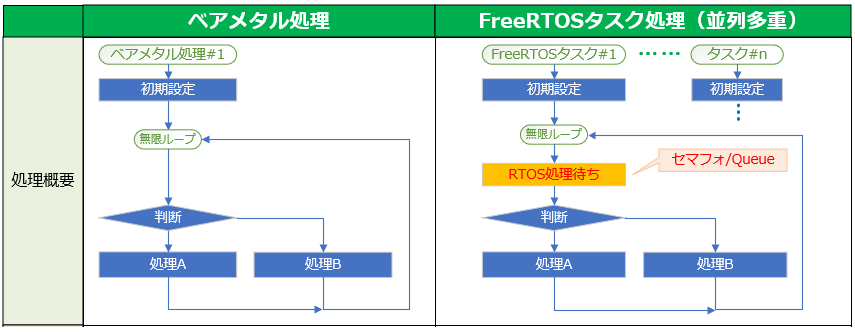
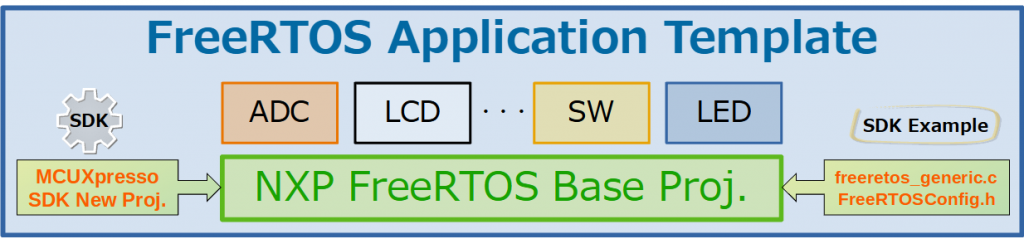
ADC、SW、LED、UART(VCOM)などのIoT MCU基本動作をRA/REテンプレート共通部分でサポートし、TrustZoneや超低電力動作などRA/RE特徴を活かす部分は、共通部分へ特徴サンプルコードを追加する方法で実現できれば嬉しいと考えています。構想段階ですが、詳細は今後投稿します。