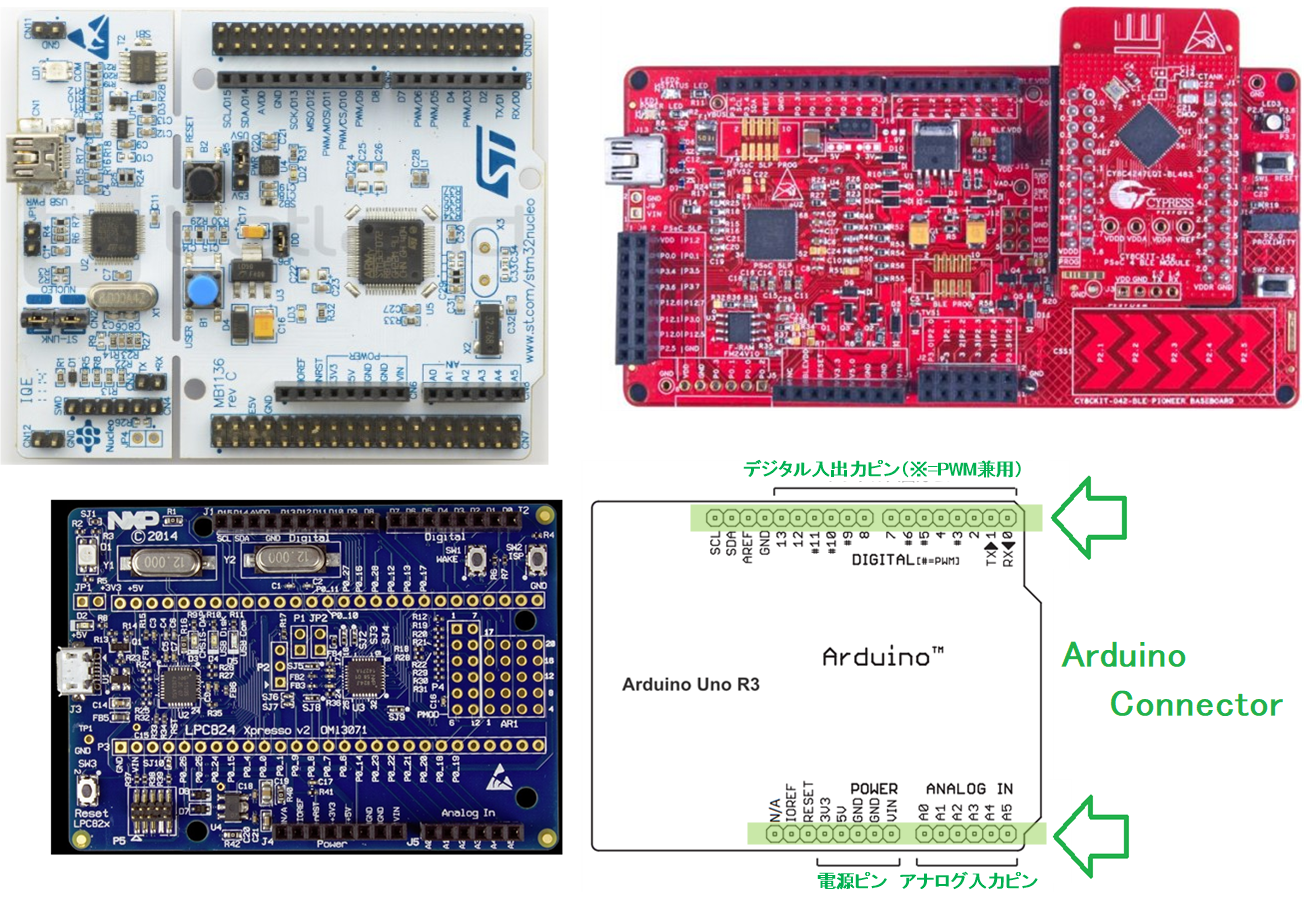
本稿は、Arduinoコネクタを持つMCU評価ボードが多い理由を、少し丁寧に説明します。上図は、Arduinoコネクタレベルでコンパチブル(=置換え可能)なSTマイクロエレクトロニクス、サイプレス・セミコンダクター、NXPセミコンダクターズ各社のMCU評価ボードを示しています。
Arduinoコネクタ
イタリア発で「オープンソースハードウェア概念」の発端となったArduino(アルデュイーノ、もしくはアルドゥイーノ)。その制御系とArduinoシールドと呼ばれる被制御系ボード間の物理インタフェースがArduinoコネクタ(右下)です。
I2C(SCL/SDA)/ADEF(アナログ基準電位)/DIGITAL(PWM兼用)/ IOREF(IO基準電位)/RESET/POWER/ANALOG INのピン配置が決まっています。
Arduinoコネクタのおかげで、制御系とシールドに分離して開発でき、それぞれをArduinoコネクタで接続すれば、Arduinoボードシステムが完成します。
Wikipediaによると、2013年には制御系とシールド、公式非公式合わせて140万台ものArduinoボードが販売されていて、安価にプロトタイプシステム構築が可能となっています。
Arduinoコネクタを持つMCU評価ボードが多い理由その1:市販安価シールド資産が使える
既にこれだけの数のシールドが販売中ですので、MCU開発にそのまま流用や小変更で使えるシールドもあります。
Arduinoコネクタを持つMCU評価ボードが多い理由その1が、この既製品で安価なシールド資産が使えるからです。使用部品選定やアートワークパターンなども十分に練られた既製品が入手できるのです。しかもこれらは殆どの場合、オープンソースハードウェアなので詳細が開示済みです。
シールドは縦方向に段重ね(スタッカブル)できますので、複数段を重ね機能増加も可能です。
ハードウエア基板を0から動作するレベルにまでもっていくのは、時間もコストも掛かります。市販シールドを利用したプロトタイプ開発が可能なことが、MCU評価ボードにArduinoコネクタを持つ理由です。
Arduinoコネクタを持つMCU評価ボードが多い理由その2:MCU性能評価に使える
シールドを使ってハードウエアが用意されれば、後はソフトウェアです。
図のようにシールドは、複数ベンダーのMCU評価ボードに使えますし、同一ベンダー内の異なるMCUの性能評価にも使えます。
例えば、最も重要な処理に必要なシールドと、その制御ソフトウェアのみをプロトタイプ開発し、MCU性能が重要処理に十分か否かの評価を行います。この評価結果で、コストパフォーマンスに優れたMCU選択が可能となります。
場合によっては、ピンコンパチブル性を利用して他ベンダーのMCU選択も可能です。Cortex-M系MCUはどれも似通ってはいますが、例えば、サイプレスのPSoCシリーズはアナログブロントエンド機能内蔵など、各ベンダーでそれぞれ特徴があります。これらMCU特徴を活かした開発で競合他社との差別化もできます。
MCU評価ボードプロトタイプ開発スピードを上げるマイコンテンプレート
その1もその2もポイントは、プロトタイプ開発のスピードです。効率的に、しかも精度良くプロトタイプ構築し評価するには、MCU製品で使用頻度が高いLCD出力やアナログポテンショメータ入力、LED出力などの単機能シールドを複数使うよりも、これら機能実装済みの汎用Baseboardを使う方が、より低コストにプロトタイプハードウエアの構築ができます。
関連投稿:CY8CKIT-042とCY8CKIT-042-BLEへの機能追加、サンプルソフトが直に試せるマイコン開発環境の章
弊社マイコンテンプレートは、Baseboard動作に必要なソフトウェアをBaseboardテンプレートで提供済みです。開発要件に必要なシールドを見つけ、シールド単体でMCU性能評価を行い、さらにBaseboard実装機能を付加すれば、MCU製品完成形により近いプロトタイプシステムでの評価も可能です。

マイコンテンプレートは、MCU評価ボードプロトタイプ開発の「速さ」をより早めます。
MCU評価ボード、IDE、開発ツール、ベンダーが変わってもテンプレート本体は不変
テンプレート本体、具体的にはアプリケーションのLauncher機能は、MCU評価ボード、IDE、コード生成ツールなどの開発ツール、ベンダー各社には依存しません。つまり、単純なC言語でできています。
従いまして、開発ツールやIDEが時代により変化・更新しても、テンプレート本体は変わりません。ご購入頂いた弊社マイコンテンプレートの付属説明資料は、発売当時の環境をベースに解説しております。しかし、最新版のIDEやコード生成ツールに更新されても、このテンプレート本体は不変ですので、安心してお使いください。
まとめ
Arduinoコネクタを持つMCU評価ボードが多い理由は、市販安価シールド資産を活用し、MCU性能評価へも活用すれば、MCUプロトタイプ開発が効率的かつ容易になるからです。プロトタイプ開発スピードをさらに上げるためマイコンテンプレートが役立つことも示しました。
マイコンは種類が多く、どのベンダーの何を使って開発すれば良いかというご質問を時々頂きます。お好きなベンダーのArduinoコネクタを持つMCU評価ボードを使ってプロトタイプ開発することをお勧めしています。制御系ベンダー差は、Arduinoコネクタで消えます。先ずは着手、あえて言えば被制御系の開発着手が先決です。