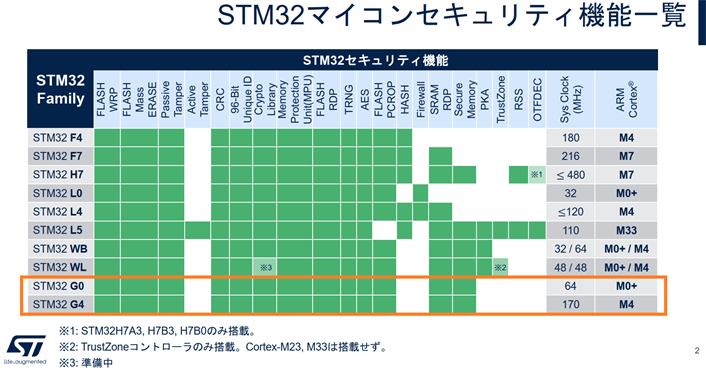
ルネサスRAファミリカタログが、最新版2021.11に更新されました。高度セキュリティTrustZone搭載IoT MCUとして、弊社は、ルネサス)RAファミリとSTマイクロ)STM32L5/U5に注目しています。
本稿は、RAファミリ中核のRA4とRA6両シリーズ特徴、TrustZoneオーバーヘッド処理がM4比2倍を説明し、評価ボードを紹介します。
RAファミリのCortex-M33とCortex-M4

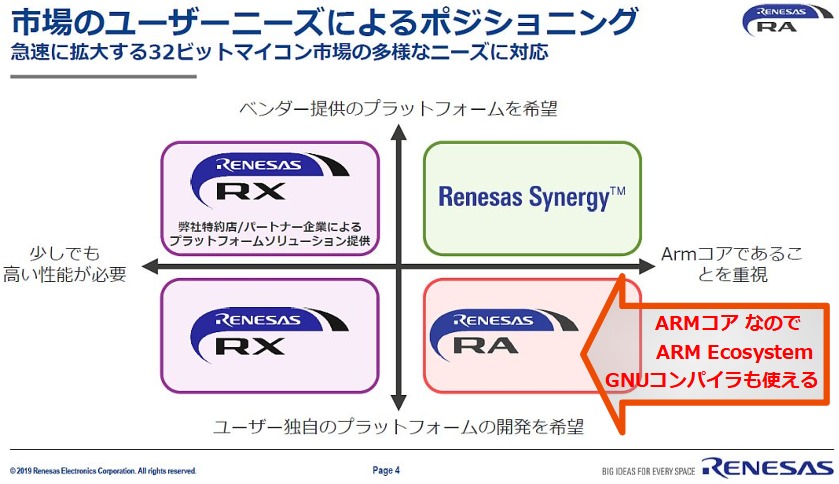
ルネサスオリジナルやARM Cortex-M系など、多種多様なMCUコアを販売しているルネサスのRAファミリ位置づけと開発方法は、コチラの関連投稿にまとめ済みです。Cortex-M系競合他社より出遅れ感もありますが、最新RAファミリカタログを見ると、TrustZone対応Cortex-M33搭載IoT MCUの精力的製品化が感じられます。
Cortex-M33搭載RAファミリの中核MCUが、RA4/6シリーズです。RA2シリーズはCortex-M23搭載、RA8シリーズは未発売です。ターゲットアプリケーションは、カタログP5にまとまっています。
※Cortex-M33 ≒ Cortex-M4後継、セキュティ機能強化コア
※Cortex-M23 ≒ Cortex-M0+後継、セキュティ機能強化コア

RA4/6シリーズには、Cortex-M4搭載MCUもあります。これは、TrustZoneまでの高度セキュリティが不要なアプリケーション向けのMCUだと思います。Cortex-M33のTrustZone活用には、内蔵Flashのパーティション分割やSecureステートとNon Secureステート切替えなど、高度セキュリティ対応オーバーヘッド処理が必要になります。
同一シリーズ内でCortex-M33とCortex-M4の動作周波数が異なる理由は、開発アプリケーション移植を考慮すると、これらオーバーヘッド処理のためにM4比2倍の高速化が必要だからと推測します。これは、コチラの関連投稿で示したCortex-M33とCortex-M4比較や開発工数比評価の内容とも一致します。
つまり、TrustZoneの高度セキュリティは、M4比2倍もMCU能力を消費する可能性がある訳です。
コスト意識が非常に高いIoT MCU顧客に、このM4比2倍を理解してもらえるかは分かりません。前稿では、筆者がWindowsユーザで、TPM足切り要件に不満でした。同様にIoT MCU顧客も、我々開発者が高度セキュリティ内容を丁寧に説明しないと納得してもらえないかもしれません。
以後は、Cortex-M33搭載RA4とRA6評価ボードをそれぞれ紹介します。
RA4シリーズ
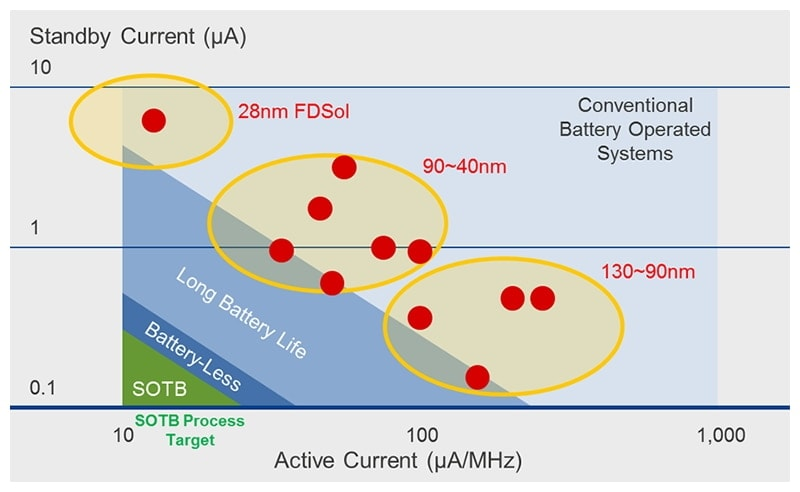
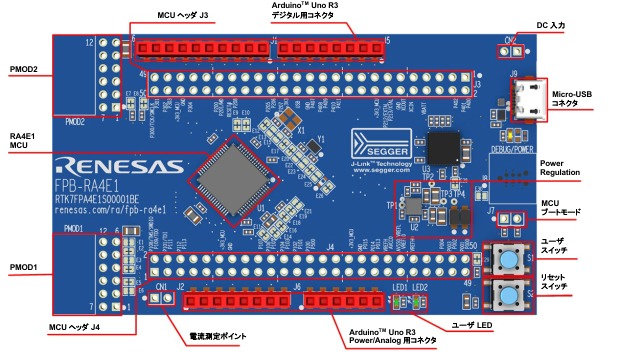
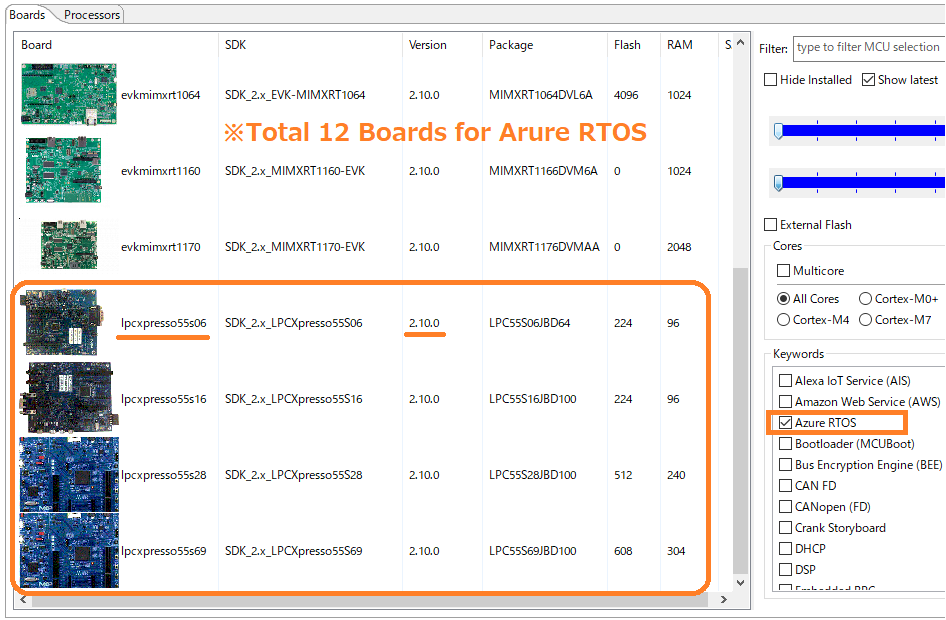
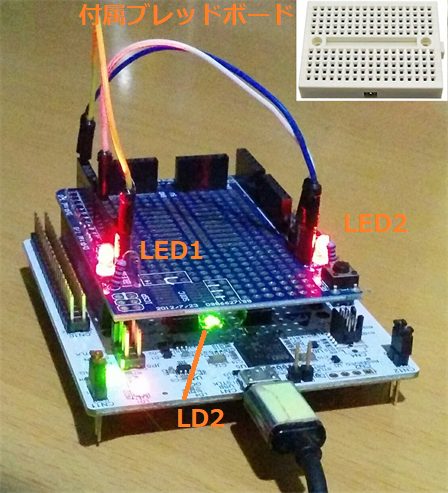
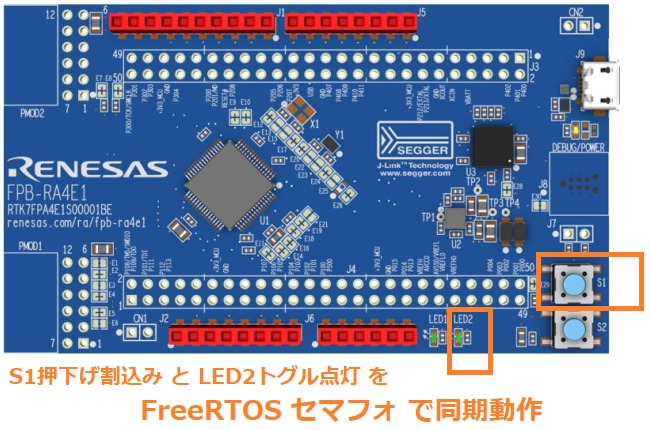
RA4シリーズの特徴は、Cortex-M33/100MHz性能と低消費電力動作です。Digi-Key記事が、判り易く特徴をまとめています。記事紹介のRA4評価ボードが、弊社も使用中のRA4E1 Fast Prototype Board (Cortex-M33/100MHz、Flash/512KB、RAM/128KB)です。
※Eは、RA4シリーズ開発エントリポイントを示します。つまり、他RAシリーズやファミリへのアプリケーション移植性に優れた汎用MCUを示しています。
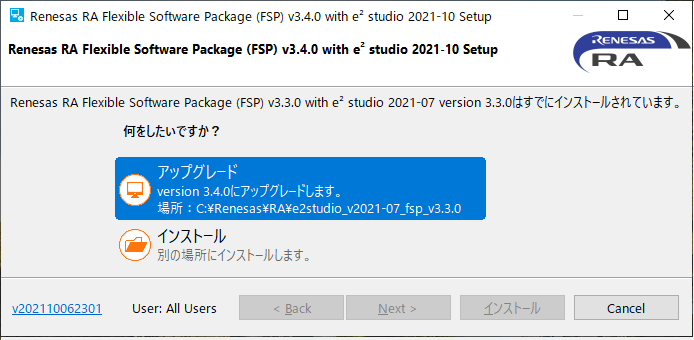
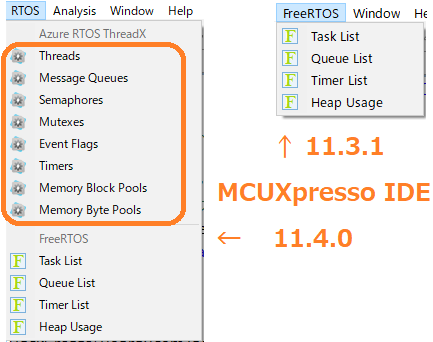
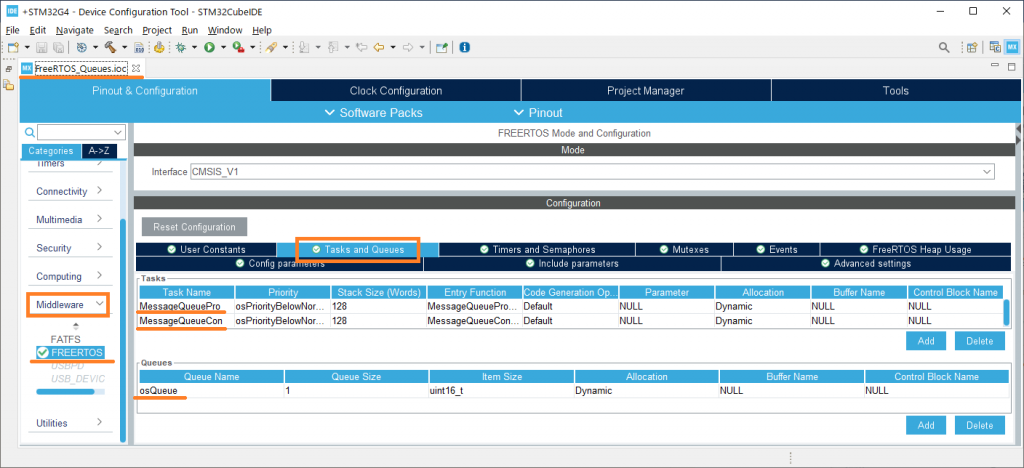
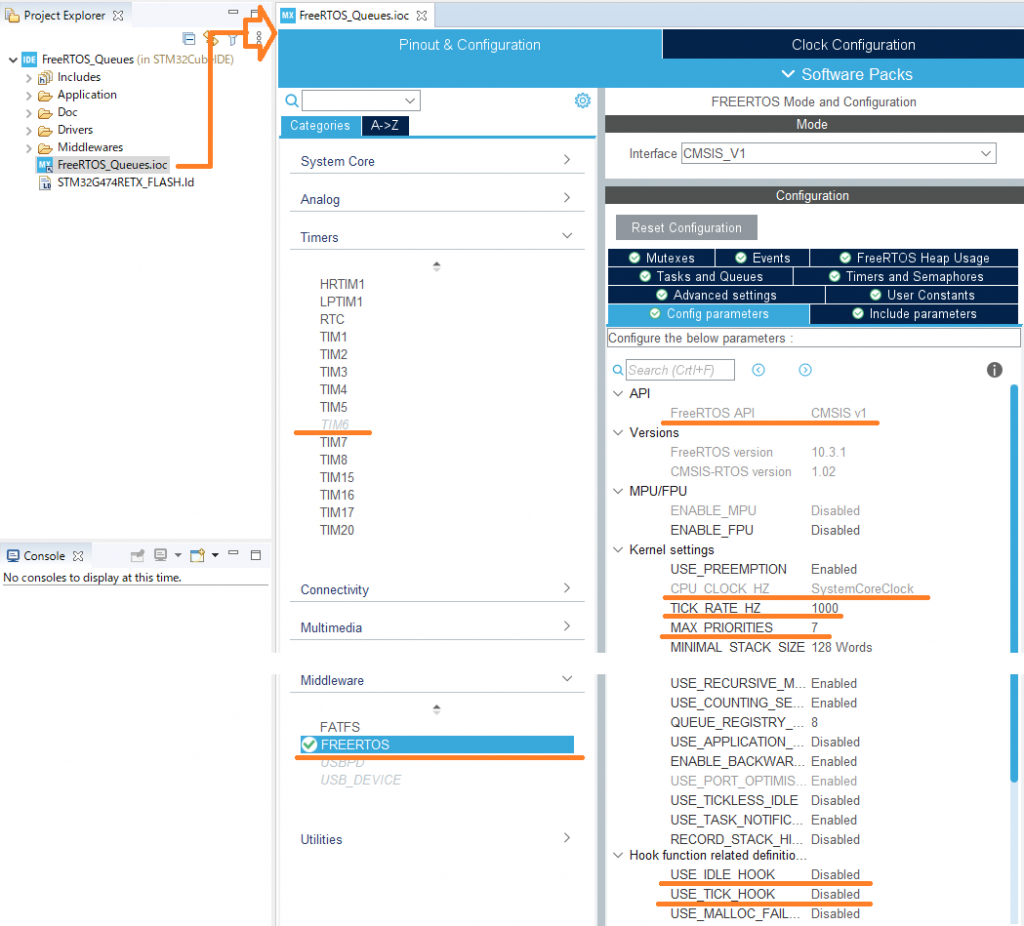
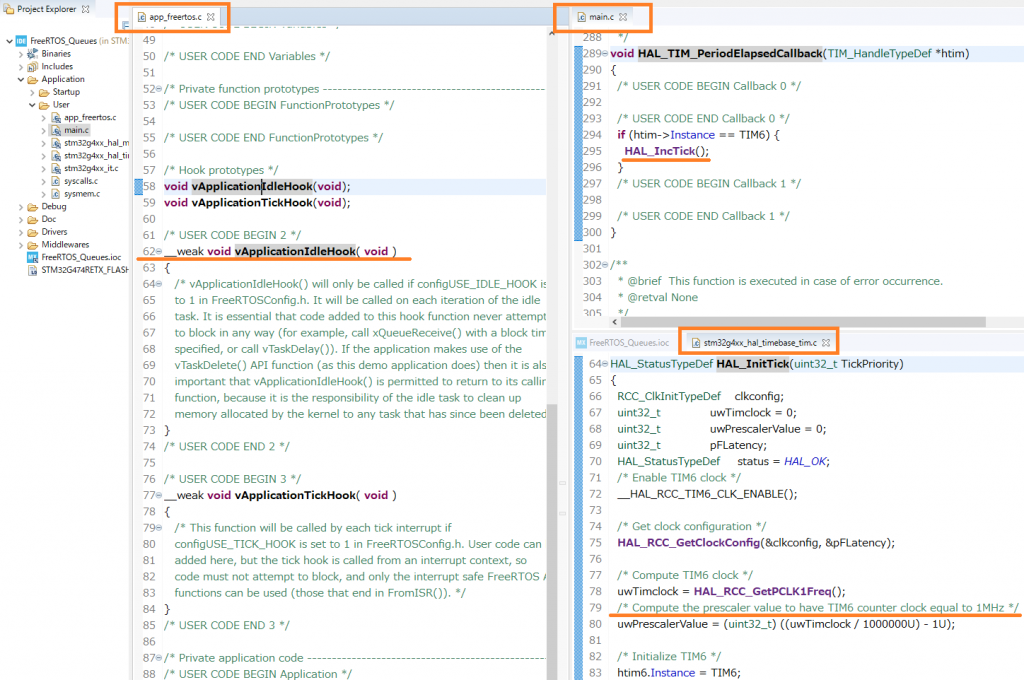
弊社は、既にRA4E1 Fast Prototype Boardを使ったFreeRTOSと、統合開発環境e2 StudioでのFlexible Software Package(FSP)の使い方を投稿済みですので参照してください。FSPとは、RAファミリ共通のSDK(Software Development Kit)のことです。
但し、どちらの投稿もTrustZone未使用です。別途投稿予定のTrustZone使用版で、2倍比を評価できればと考えています。未使用のTrustZoneですが、プロトタイプ開発初期から高度セキュリティに配慮すること、顧客がTrustZoneを要求した場合、開発プロトタイプをそのまま活用できるメリットがあります。
※TrustZone使用版は、検討中です。当面の課題は、後の章に示しています。
RA6シリーズ
RA6シリーズの特徴は、RA4比、より高速なCortex-M33/200MHz搭載です(カタログには、最大240MHzと記載されていますが、発売製品はどれも200MHzです)。モータ制御などに向いています。やはりカタログよりも、Digi-Key記事のほうが、RA6シリーズ特徴理解がし易いです。
※Mは、モータ制御向けを示します。その他、カタログ記載のWやTなどのサフィックスも、内蔵周辺回路のアプリケーション適合性を示します。
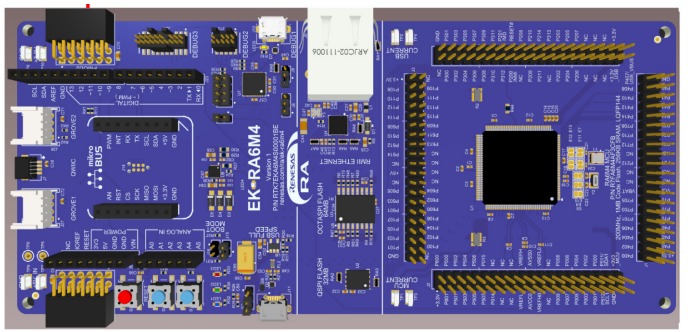
記事紹介のRA6M評価ボードが、EK-RA6M4です。モータ制御先進アナログ回路や大容量Flash内蔵ですが、個人購入するには高価な気がします。顧客モータ仕様変更に柔軟に対応するには、汎用RA6E1で共用部分を早期開発し、先進制御部分のみを差分開発する方法が効果的だと思います。
TrustZoneサンプルコード課題
TrustZone概念は理解しても、実装はどうか? が普通のソフトウェア開発者には判り難い点です。秘密鍵など、何をSecure領域に書込み、いつ読込むかなど、セキュリティ専門家解説付き具体的サンプルコードを探していますが、適当なものが今のところ見つかりません。
TrustZone利用手順と保存対象は、接続クラウド側にも多少依存するでしょうが、ほぼ決まっていると思っています。具体的サンプルコードがあればテンプレート化も可能か、というのが現状です。
Blogテーマ変更

本ブログテーマを変更しました。本年1月変更に続き2回目です。変更理由は色々ありますが、投稿記事の「カテゴリ」と「タグ」が、投稿最後に表示される点が一番の変更点です。
今後とも本ブログ、よろしくお願いいたします。