Azure RTOS習得3回目は、新規STM32CubeIDE Azure RTOSプロジェクト作成方法と、STM32CubeMX生成ソースコードの、どこに、何を、追加すれば良いかを説明します。
新規「汎用」Azure RTOSプロジェクト
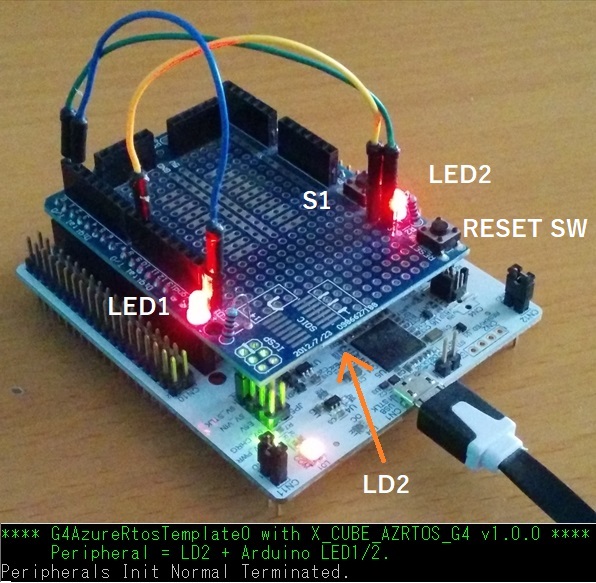
前稿で、STM32G4(Cortex-M4/170MHz)評価ボード:NUCLEO-G474REへArduinoプロトタイプシールドを追加し、最も基本的なAzure RTOS ThreadXサンプルコードのTx_Thread_Creation動作を解説しました。
このTx_Thread_CreationサンプルコードのTx_Thread_Creation .icoから、新規の「汎用」AzureRtos0プロジェクトを作成します。
汎用の意味は、このAzureRtos0プロジェクトへセマフォやキューなどのRTOS機能を追加し、Azure RTOS習得に使うからです。
残念ながら現時点では、STM32G4用Azure RTOSセマフォやキューのサンプルコードは無いため、これらRTOS単独機能を持つプロジェクトを自作する訳です。
AzureRtos0プロジェクトから自作予定のAzure RTOS機能プロジェクトが以下です。
・AzureRtosEventFlagプロジェクト(本稿)
・AzureRtosQueueプロジェクト
・AzureRtosMutexプロジェクト
・AzureRtosSemaphoreプロジェクト
Tx_Thread_Creation .ico
STM32CubeIDE(以下CubeIDE)の新規STM32プロジェクトは、様々な作成方法があります。
ただ、Azure RTOSプロジェクトは、STM32CubeMX(以下CubeMX)の設定に、ベアメタル開発と異なる注意が必要です。このような時は、既に設定済みのCubeMX Configuration File (.ico)を流用すると、注意事項を含んだ新規プロジェクト作成が簡単にできます。
Azure RTOSプロジェクトのCubeMX設定の注意事項は、別途投稿します。本稿は新規Azure RTOSプロジェクト作成に焦点を置き説明します。
新規汎用AzureRtos0プロジェクト作成
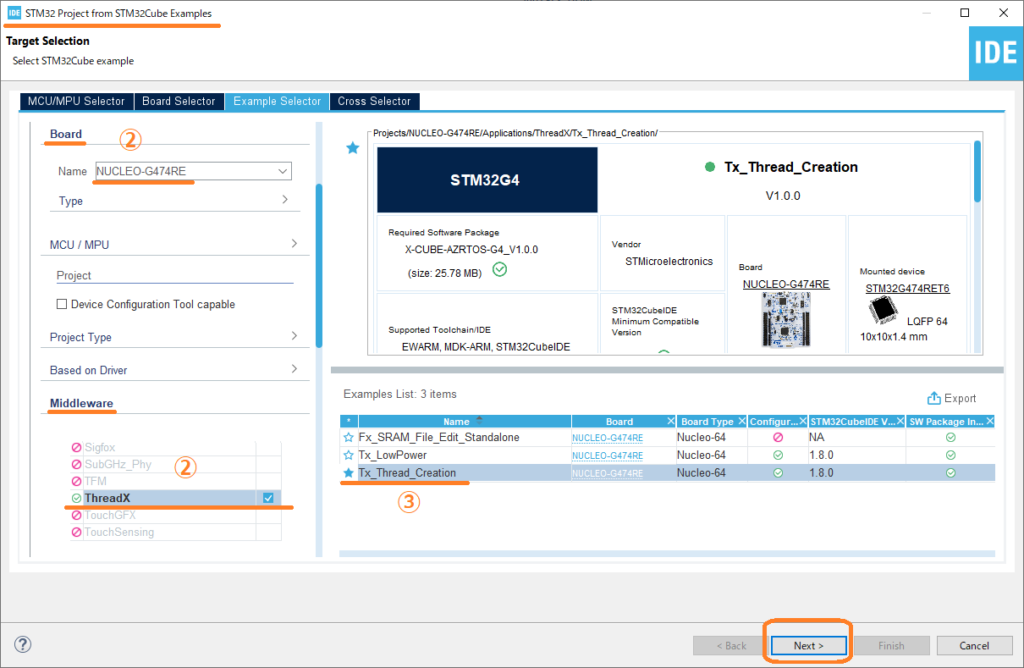
Tx_Thread_Creation .icoを流用したAzureRtos0プロジェクト作成手順が下記です。
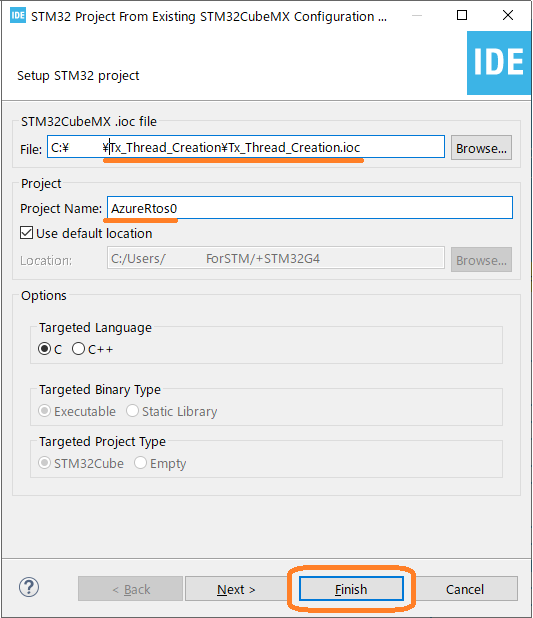
① CubeIDEのInformation Centerℹ️でStart new project from STM32CubeMX file(.ioc)クリック
② STM32CubeMX ico fileにTx_Thread_CreationのTx_Thread_Creation .ico選択、Project NameにAzureRtos0を入力しFinishクリック
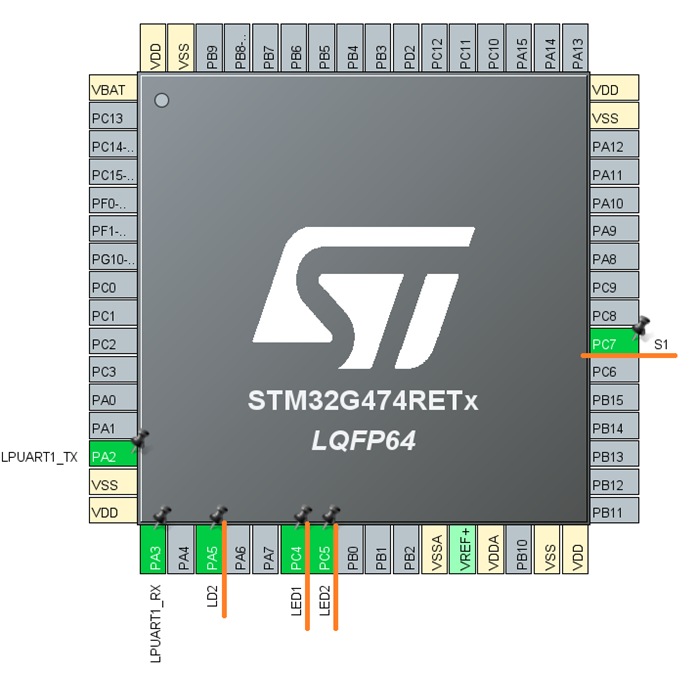
③ PA5ユーザラベルをLD2へ変更、PC4とPC5をGPIO Output、ユーザラベルLED1、LED2に設定、PC7をGPIO Input、ユーザラベルS1に設定(LD2は評価ボード、LED1/2、S1は追加Arduinoプロトタイプシールドのポート)
④ Project>Generate Codeをクリックし、初期設定コードとAzure RTOSプロジェクトファイル生成
⑤ main.c L92へ、下記タイトルVCPメッセージ出力HALコード追記

⑥ ビルドし、評価ボードへダウンロード
⑦ Tera Termなどのターミナルソフトで追記VCPメッセージを確認し、新規汎用AzureRtos0プロジェクト動作確認

Azure RTOSイベントフラグ機能追加
AzureRtos0プロジェクトへ、イベントフラグを使ってメインスレッドとスレッド1/2間同期を行う機能を追加し、AzureRtosEventFlagプロジェクトを作成します。
このプロジェクトは、Azure RTOS ThreadXサンプルコードと同じ処理内容です。従って、Azure RTOS ThreadXサンプルコードが、AzureRtos0へ追記するコードの代用に使えます。
始めに、AzureRtos0プロジェクトファイルの、どこに、何を追加するかを説明し、次章で実例を示します。
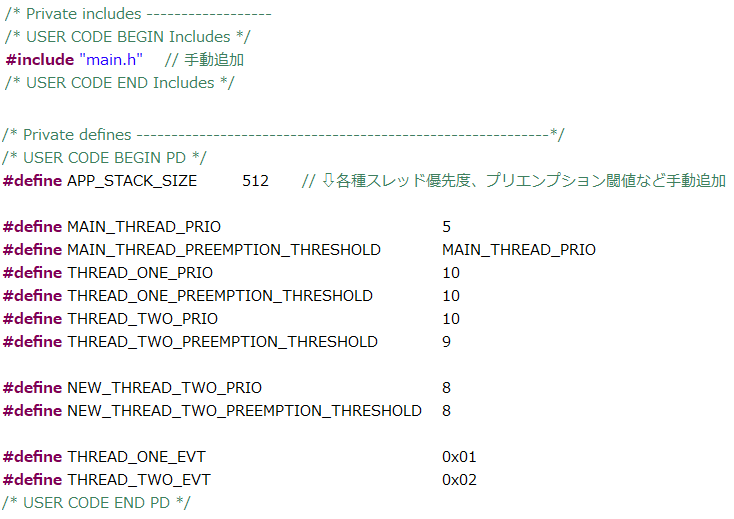
| 追記ファイル | 追加内容 |
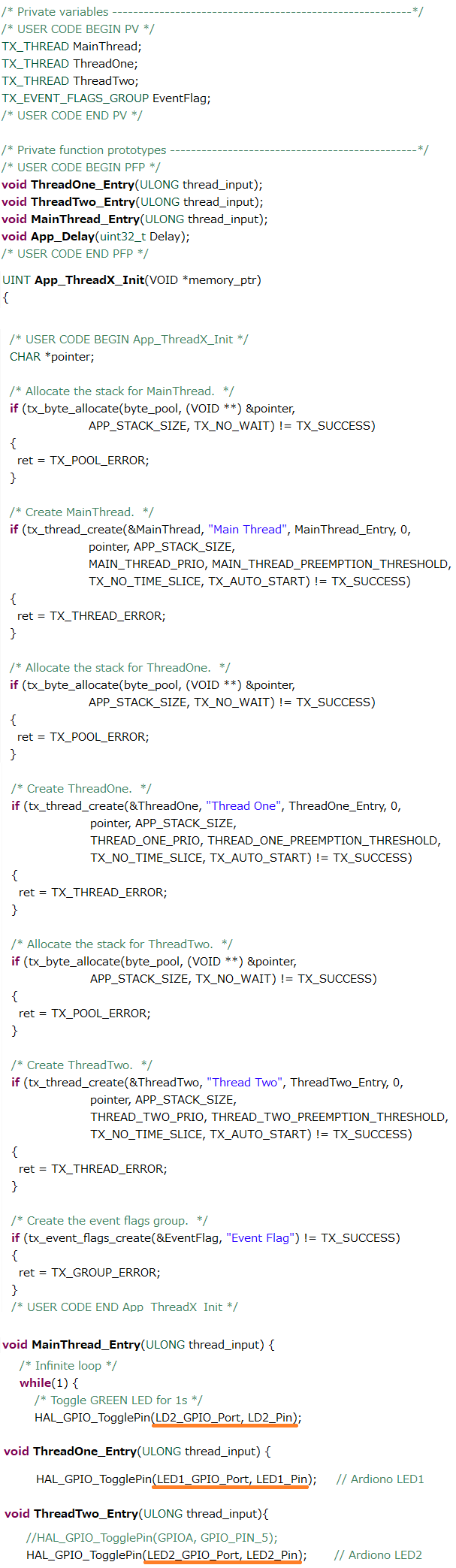
| Core>Src> app_threadx.c |
1) UINT App_ThreadX_Init()へ、イベントフラグ生成関数、追加スレッド生成関数 2) 追加スレッドのエントリ関数(メイン関数) |
| Core>Inc> app_threadx.h |
追加スレッド優先度、プリエンプション閾値などのマクロ |
RTOSであっても、ベアメタル開発で機能追加する時と同じ追記ファイルと追加内容です。
違いは、App_ThreadX_Init()の中でイベントフラグや追加スレッドを生成すると、直にRTOS動作を開始(TX_AUTO_START)する点です。従って、ベアメタル関連main.c/hの変更点は、VCP出力メッセージの変更程度です。
つまり、RTOS関連とベアメタル関連、それぞれのメインエントリー(メイン関数)があり、RTOS動作追加だけなら、main.c/hは不変でも構いません。
筆者は、cファイルとhファイルを一緒に記述したい派です。しかし、CubeMXがこれらを分離してRTOS関連ファイルを生成しますので、このファイル分離に従い追記します。
スレッド優先度やプリエンプション閾値を変えれば、Azure RTOS動作が簡単に変わりますので、分離の方が好ましいのかもしれません(動作変更例は、Azure RTOS習得(2)の4章:メインスレッド参照)。
AzureRtosEventFlagプロジェクト作成
AzureRtos0プロジェクトはテンプレートとして様々なプロジェクトで利用しますので、CubeIDEでAzureRtos0プロジェクトをコピーし、別名のAzureRtosEventFlagプロジェクトとしてペーストして使います。ペースト先のAzureRtos0.icoも、AzureRtosEventFlag.icoへRenameします。
これで、AzureRtosEventFlagプロジェクトのひな型ができました。
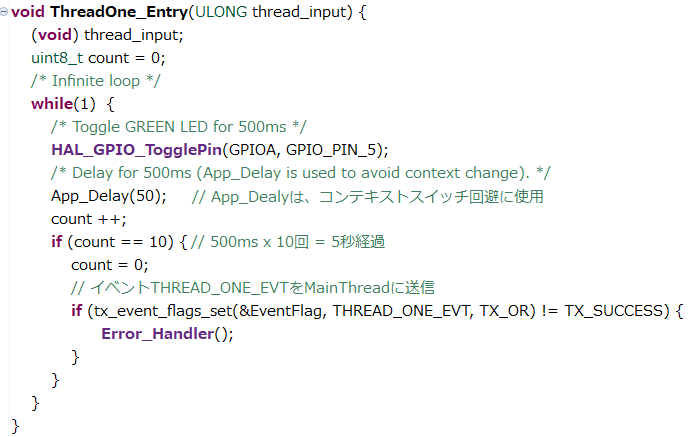
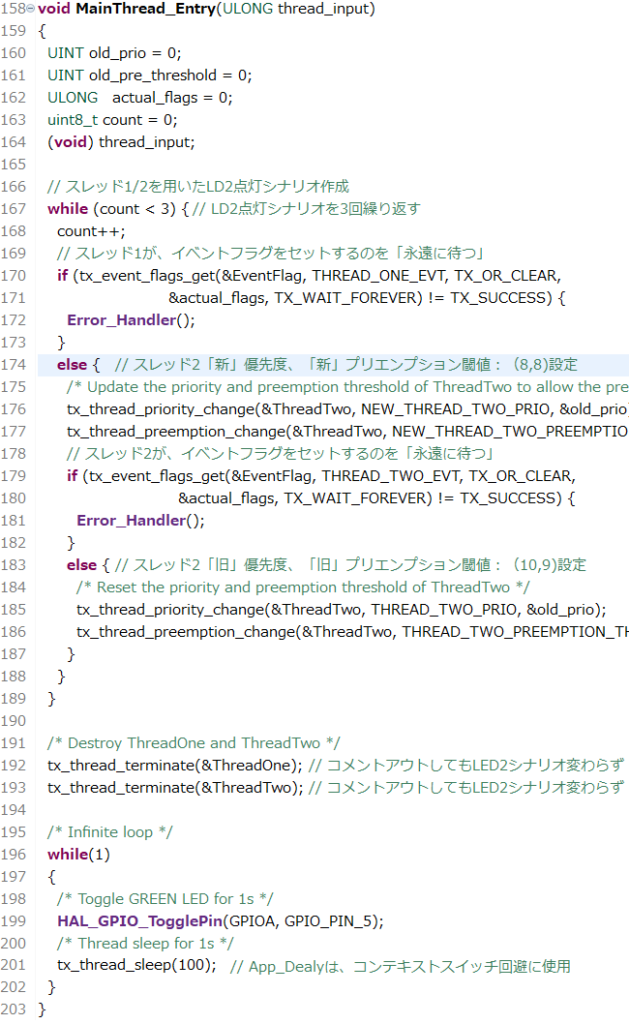
AzureRtosEventFlagプロジェクトの追記部分抜粋が下記です。追記コードは、Azure RTOS ThreadXサンプルコードです。
CubeMX生成コメントの、/* USER CODE BEGIN … */、/* USER CODE END …*/が、追記ガイドに役立ちます。
※手抜きご希望の方は、Azure RTOS ThreadXサンプルのapp_threadx.cとapp_threadx.hを、そのままAzureRtosEventFlagのapp_threadx.cとapp_threadx.hへ上書きしてもOKです😅。但し、LED1/2への出力は変更してください。
AzureRtosEventFlagプロジェクトへ追記後、ビルドし評価ボードへダウンロードします。
App_threadx.c追加例
app_threadx.h追加例
AzureRtosEventFlagプロジェクト動作確認
AzureRtosEventFlagプロジェクトは、スレッド1がArduinoプロトタイプシールドのLED1制御、スレッド2がLED2制御を行う以外は、Azure RTOS ThreadXサンプルコードと同じ動作です。
従って、同じ動作を確認しAzureRtosEventFlagプロジェクト作成の成功です。
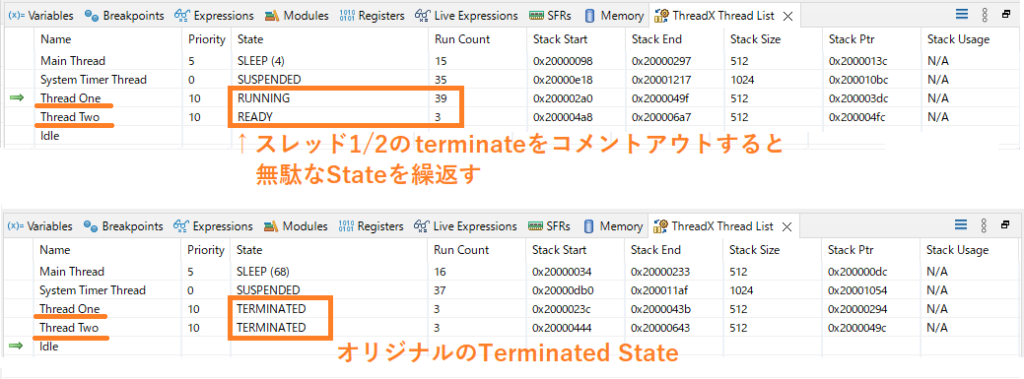
作成したAzureRtosEventFlagプロジェクトを使って、イベントフラグの制御、スレッド1/2優先度やプリエンプション閾値変更によるArduino LED 1/2動作変化を確認し、イベントフラグ機能を習得してください。
本稿で作成したAzure RTOSイベントフラグの機能は、前稿で説明済みですので、割愛します。
まとめ
Azure RTOS ThreadXサンプルコードのTx_Thread_Creation.icoを流用した、新規汎用AzureRtos0プロジェクト作成方法を示しました。
汎用AzureRtos0プロジェクトに、RTOS機能別プロジェクト例として、イベントフラグ機能を追加したAzureRtosEventFlagプロジェクトを作成し、Azure RTOS ThreadXサンプルコードと同じ動作を、評価ボードにArduinoプロトタイプシールド追加し確認しました。
機能追加したAzureRtosEventFlagプロジェクトにより、汎用AzureRtos0プロジェクトソースコードのどこに、何を追記するかを示しました。
今後、AzureRtos0プロジェクトへセマフォなどの機能を追加し、Azure RTOS機能別習得をすすめます。
付記:日本語文字化け対策
デフォルトのSTM32CubeIDEとSTM32CubeMXを使ってプロジェクト開発時、日本語文字化けが発生します。過去投稿済みの対策を付記します。
STM32CubeMXのプロジェクトGenetate Code実行「前」に、
STM32CubeIDEの設定変更
① Windows>Windows>Prefernces>Colors & font>文字セットを「日本語」へ設定
② Project>Properties>Text file encordhingをOthers:「Shift-JIS」へ設定
以上で、Genetate Codeしソースコードが上書きされても、日本語文字化けは無くなります。