NXP)LPCXpresso54114(Cortex-M4/100MHz、Flash/256KB、RAM/192KB)で動作するFreeRTOSアプリケーションテンプレート開発に着手しました(関連投稿:FreeRTOSアプリケーションテンプレート構想)。
この開発で用いる新規FreeRTOSプロジェクト作成方法、新規作成プロジェクトとMCUXpresso SDK付属FreeRTOSサンプルプロジェクトとの違いを示し、FreeRTOSアプリケーションテンプレートのベースプロジェクトを解説します。
まとめ:新規FreeRTOSプロジェクト作成方法とFreeRTOSベースプロジェクト
新規NXP FreeRTOSプロジェクト作成方法をまとめました(詳細は、次章サンプルプロジェクト留意点の後に説明)。
Step1:MCUXpresso SDKで評価ボード選択
Step2:FreeRTOS選択(デフォルト:ベアメタル)
Step3:FreeRTOSドライバ選択(デフォルト+ユーザ追加ドライバ)し、新規プロジェクト作成
Step4:新規プロジェクトへ、サンプルプロジェクトのfreertos_generic.cとFreeRTOSConfig.hを上書き
Step5:アイドルタスクへ低電力動作WFI()を追記し、FreeRTOSベースプロジェクト完成
Step3までが、一般的なFreeRTOSプロジェクト作成方法、Step4と5が、弊社FreeRTOSアプリケーションテンプレート向け工夫箇所です。
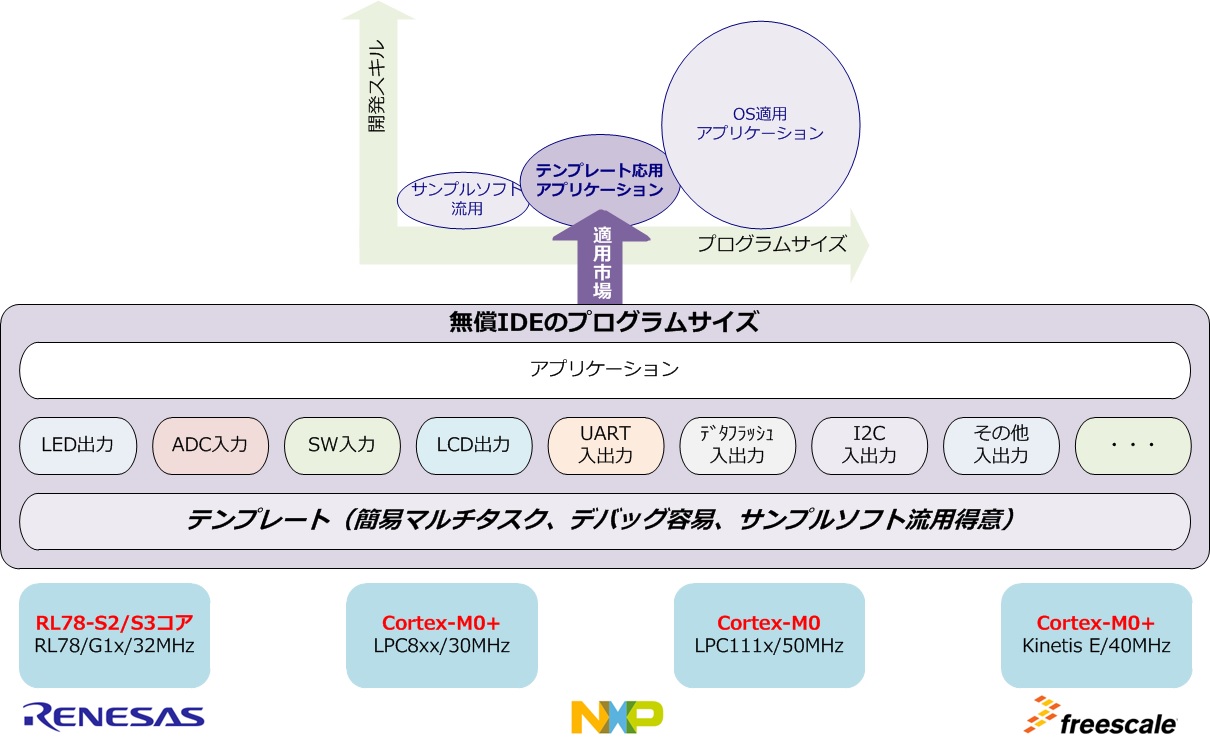
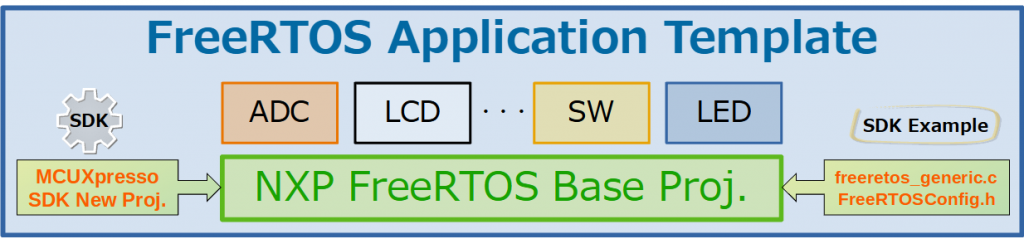
弊社FreeRTOSアプリケーションテンプレートは、Step5で作成したFreeRTOSベースプロジェクトへ、例えばADC.cやLCD.cなど制御対象毎のソースファイルを追加して開発します(最初の図)。LCDを使わないアプリケーションの場合は、LCD.cをベースプロジェクトから除外すればそのまま使えるなどポータビリティも考慮しています。
Step3で、ユーザ未追加ドライバ、例えばFreeRTOSメールボックスドライバを、SDKを使わずにベースプロジェクトへ手動で追加するのは、手間やケアレスミスが発生します。
最初から全てのドライバをベースプロジェクトへ追加しておくのも1つの方法ですが、弊社は、必須ドライバでアプリケーションを開発し、追加が必要な時には、再度SDK新規プロジェクト作成からドライバを追加する方法を推薦します。
必須ドライバは、SDKサンプルプロジェクト:freertos_genericで使用中のドライバとADC、VCOMです。これらドライバを追加したベースプロジェクトであれば、FreeRTOSアプリケーションテンプレート構想3章で示したアプリケーション動作に必要十分だと現時点では考えています。
※サンプルプロジェクト:freertos_genericの詳細は、後日、別途投稿を予定しています。freertos_generic名称から判るように、キューやセマフォなど汎用FreeRTOS処理実装のサンプルプロジェクトです。サンプルプロジェクトの概略は、関連投稿を参照してください。
SDK FreeRTOSサンプルプロジェクトと新規作成プロジェクトの違い
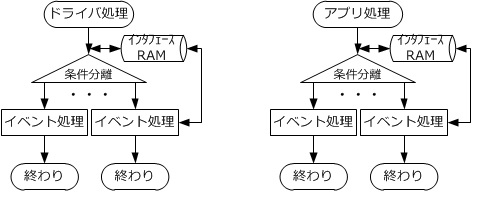
MCUXpresso SDK付属のFreeRTOSサンプルプロジェクトと、前章の新規作成FreeRTOSプロジェクトは、ファイル構成が異なります。
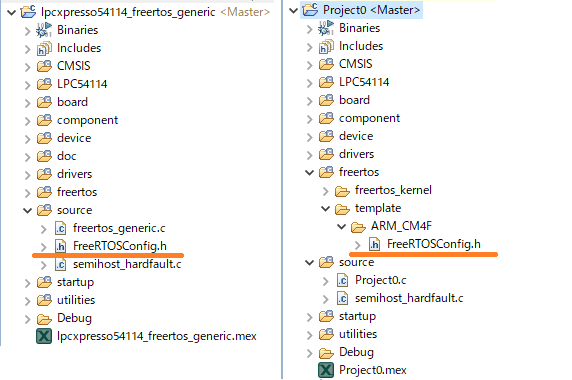
構成が異なる理由は、サンプルプロジェクトがFreeRTOS個別技術の説明に重点を置いており、これに都合が良いファイル構成になっているからです。
つまり、左側のsourceフォルダ内にあるfreertos_サンプル.c とFreeRTOSConfig.hの2ソースコードさえ読めば、提供処理が判るように全てのサンプルプロジェクトが作成されています。
※FreeRTOSConfig.h は、FreeRTOS全体動作を決める最重要ファイルです。後日freertos_generic投稿時に説明を加えます。
右側新規作成FreeRTOSプロジェクトと比べると、ポータビリティなどは犠牲になっています。SDKやFreeRTOS自身もバージョンアップしますので、開発済みアプリケーションのポータビリティは重要です。
新規作成ファイル構成で開発したアプリケーションであれば、バージョンアップした環境でも開発済みアプリケーションの移設は容易です。
FreeRTOSサンプルプロジェクトは、機能理解専用と考えれば良いでしょう。なお、FreeRTOS基本機能は、弊社特集サイトを参照ください。
Step1:評価ボード選択
以降は、1章:まとめで示した新規FreeRTOSプロジェクト作成方法とFreeRTOSベースプロジェクトの詳細を示します。
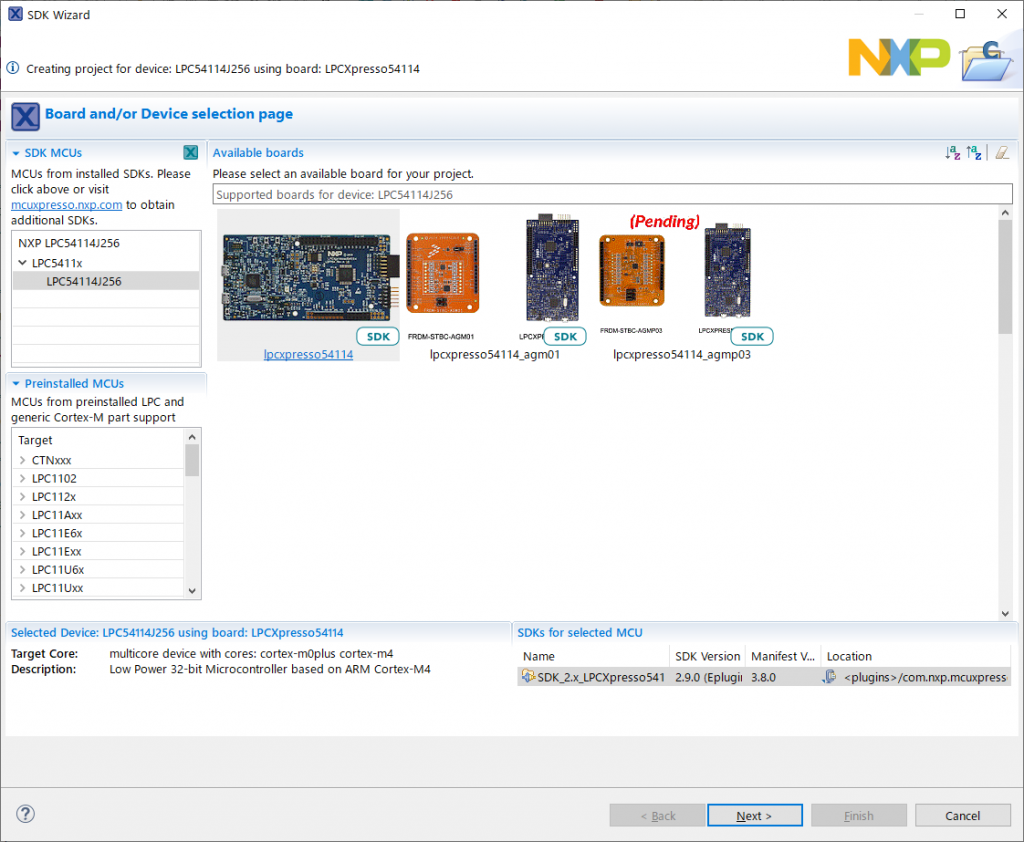
MCUXpresso IDEのNew projectをクリックし、SDK Wizardで評価ボード:lpcxpresso54114を選択、Nextをクリックします。
Step2:FreeRTOS選択
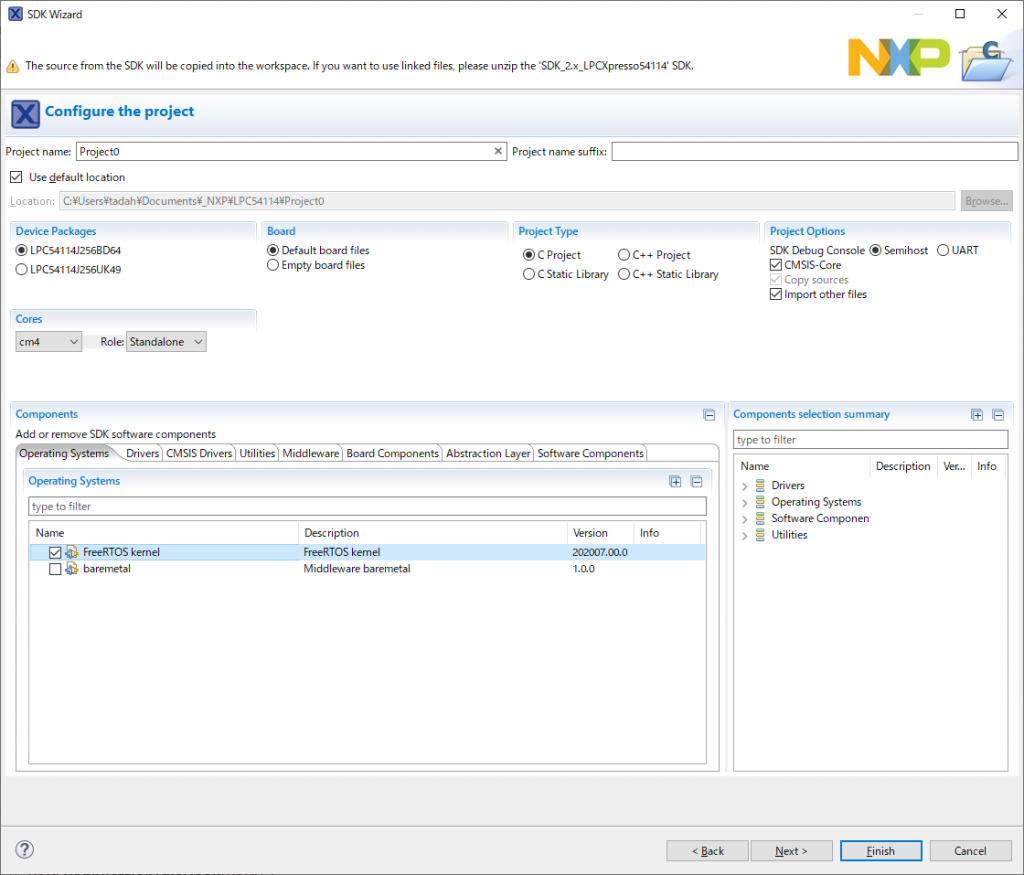
ComponentsウインドのOperating Systemタブで、デフォルトbaremetalをFreeRTOS kernelへ変更します。
Step3:FreeRTOSドライバ選択
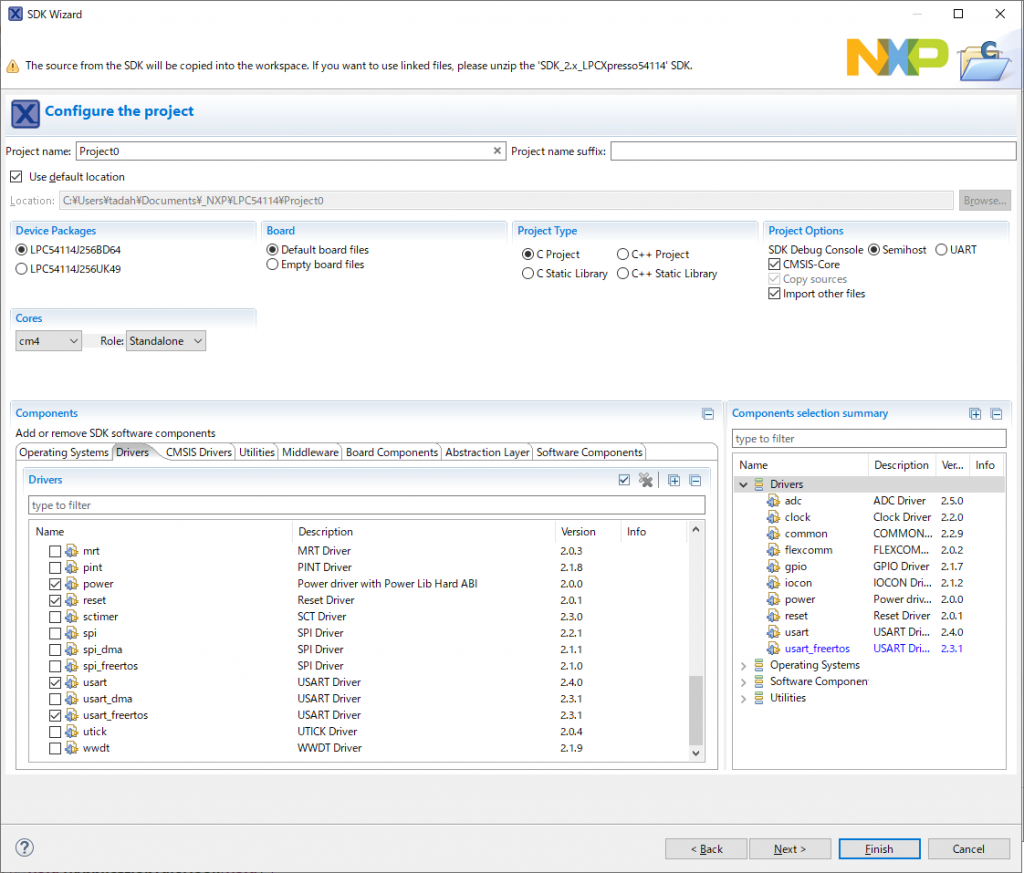
Driversタブでデフォルトドライバに加えadcとusart_freertosを追加します。Components selection summaryウインドのDriversを開くと、実装ドライバが一覧表示されます。Finishクリックで新規FreeRTOSプロジェクトを作成します。
Step4:freertos_generic.cとFreeRTOSConfig.h上書きコピー
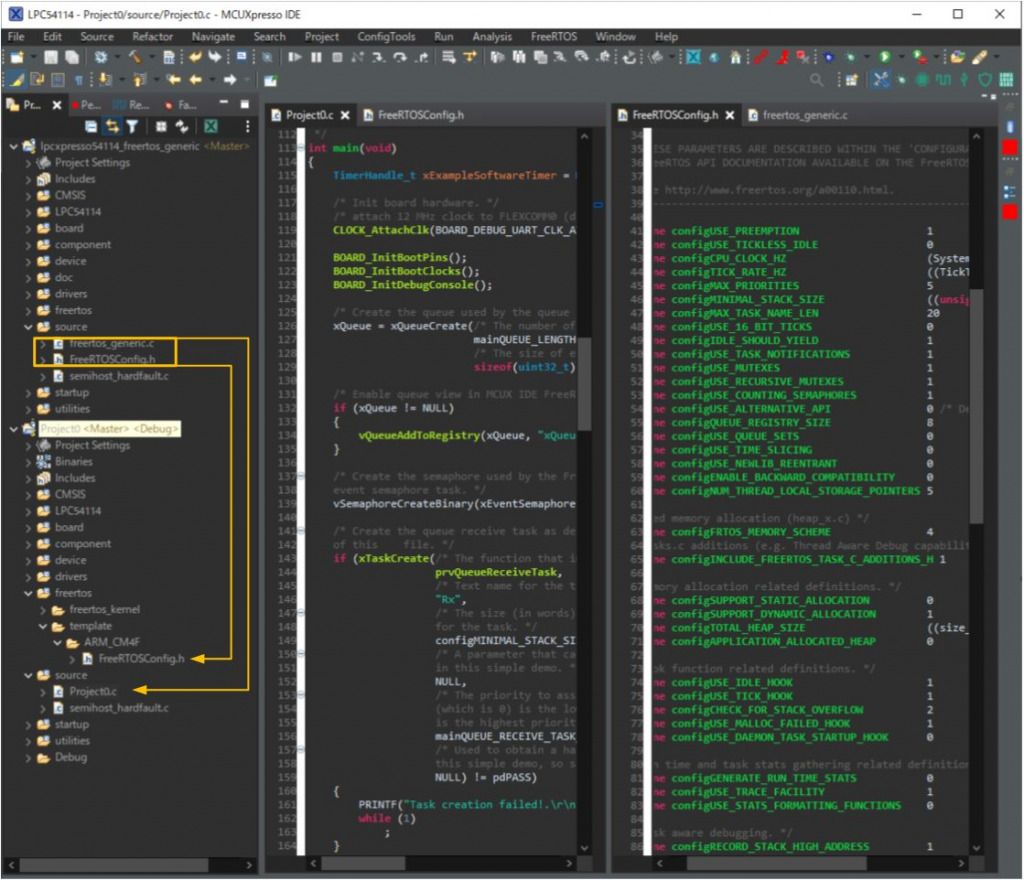
作成した新規FreeRTOSプロジェクト(Project0)のsource>Project0.cとfreertos>template>ARM_CM4F>FreeRTOSConfig.hを、サンプルプロジェクトlpcxpresso54114_freertos_genericのsource>freertos_generic.cとFreeRTOSConfig.hで上書きします。
Step5:FreeRTOS低電力動作追記
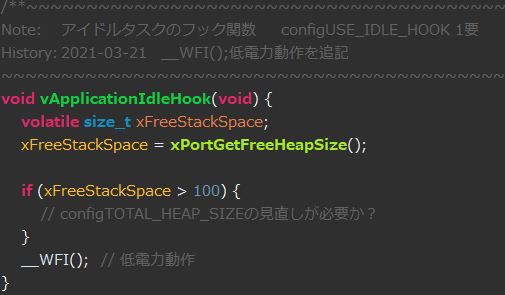
FreeRTOSアイドル時に低電力動作させるため、上書きしたProject0.cのvApplicationIdelHook()へ、WFI()を追記します。BuildしFreeRTOSベースプロジェクトが完成です。
あとがき:ダークモードと日本語コメント
Step4と5の図は、MCUXpresso IDEのAppearanceをデフォルト:ClassicからDarkに変更しています。
流行のDarkの方が、コード自体は見易いがコメントの方は今一歩に感じます。弊社FreeRTOSアプリケーションテンプレートは、Colors and Fontsにメイリオ11Pを使い、追記日本語コメントを文字化け無しに表示する方針で開発します。ClassicかDarkかは、お好みで選択してください。