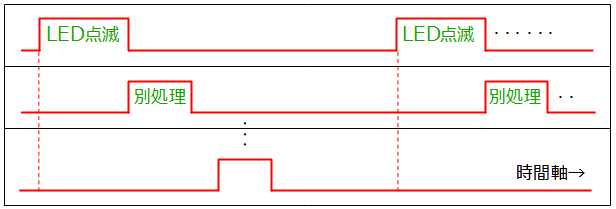
ルネサスRAファミリ開発に評価ボード毎のサンプルコードが重要であることは、過去何回か投稿済みです。今回は、これとは別の、「Stacks毎」に提供される第2のサンプルコード利用方法を説明します。
RAプロジェクトソースコード開発手順
ごく簡単にRAプロジェクトのソースコード開発手順を説明すると、
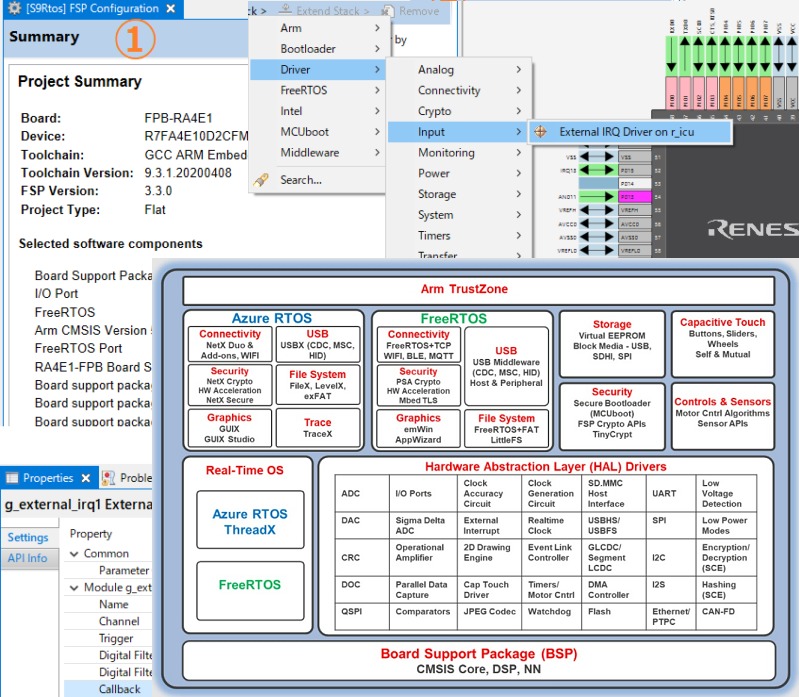
1) 利用「Stack」をFSPパースペクティブへ追加
2) Generate Project Contentクリック
3) 生成されたDeveloper AssistanceのStack API群から、利用APIをソースコード上へコピー&ペースト
という3手順の繰返しです。Stackとは、MCU周辺回路のことです。
評価ボードサンプルコードは、あらかじめ1)~3)をエキスパートが行い、サンプルで利用するStackとStack APIは、エキスパートが選択済みの実動作プロジェクトです。
一方、開発者自らが、1)~3)手順でソースコード開発する時は、どのStackを追加するか、利用するAPIは何か、を検討する必要があります。この検討に必要な情報は、全てFSPパースペクティブへ配置したStackのℹ️から得られます。
ℹ️をクリックすると、Stack PropertiesのAPI infoタブ相当の英文解説が読めます。内容は、Function、Overview、Exampleなどです。API info表示内容と同じですが、より詳しい説明が得られます。
「Stack毎」に提供される第2のRAサンプルコードとは、このExampleのことです。
Low Power Modes (r_lpm)の例
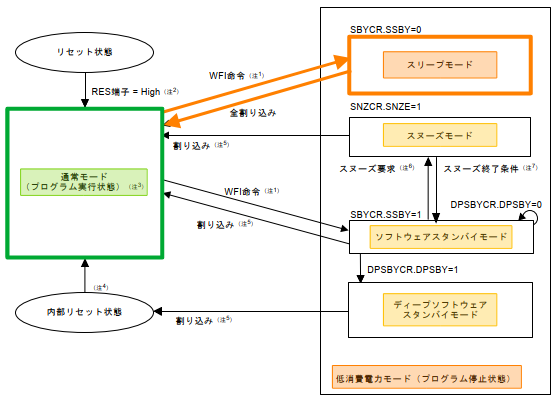
MCUアプリケーションに、低電力動作は必須です。RAファミリには、スリープ/ソフトウェアスタンバイ/スヌーズ/ディープソフトウェアスタンバイの4低電力動作モードがあります。例えば、RA6E1グループユーザーズマニュアルハードウェア編の10章を参照ください。
電力消費の最も大きいMCUを停止するのが、スリープモードです。スリープからの復帰時間も短く、簡単で効果的な低電力動作が可能です。
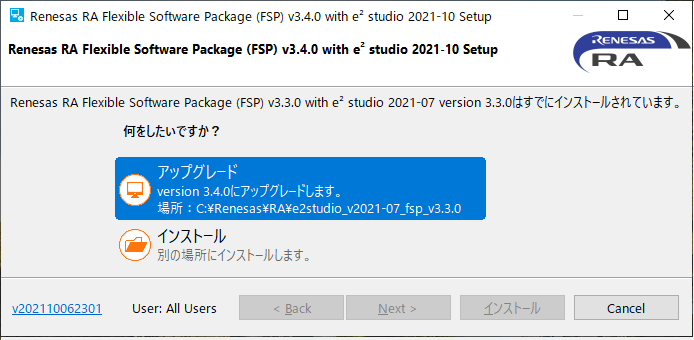
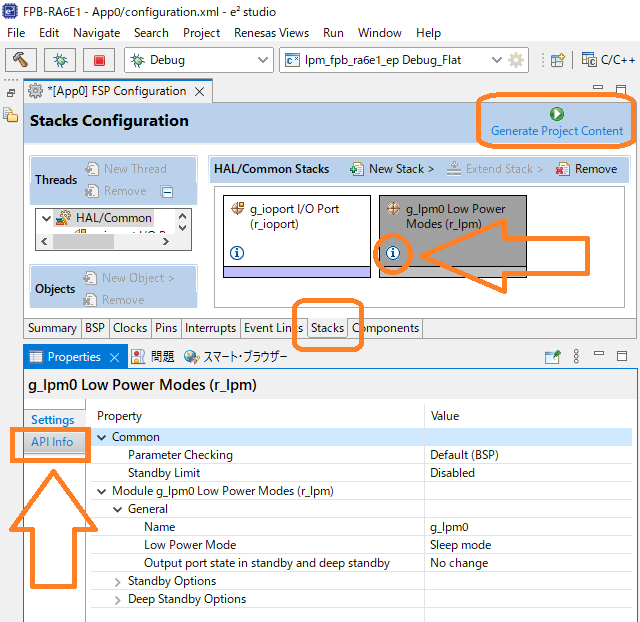
RAファミリで低電力動作を行うには、FSPパースペクティブへ、最初の図に示したLow Power Modes (r_lpm)スタックを追加します。
Stackのℹ️とサンプルコード
追加Stack ℹ️クリックで表示されるのが、LPMの詳細説明です。LPMスタック追加で増える5個全てのLPM APIが解ります。また、スリープモードプロパティがデフォルト設定済みなのも解ります。
このスリープモードのExampleが、下記LPM Sleep Exampleです。
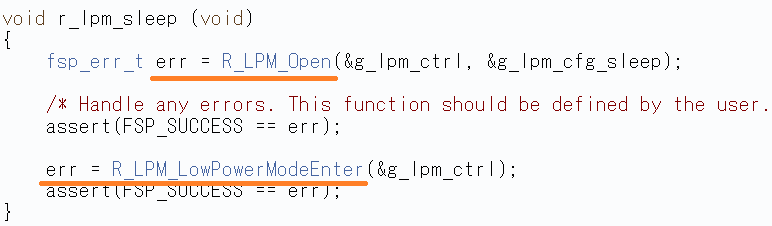
利用APIは、R_LPM_Open()とR_LPM_LowPowerModeEnter()の2個のみです。assert(FSP_SUCCESS == err)は、次章で説明します。
注意点は、この「Stacks毎」に提供されるサンプルコードは、一般的なサンプルコード構成、つまり、初期設定と無限ループ内処理の記述形式ではないことです(一般的サンプルコード構成については、コチラの関連投稿参照)。
ここで示されているのは、LPMスリープモード時に利用するAPIとその利用順序です。
つまり、最初にR_LPM_Open()でスタックAPI利用可否を判断し、次に、R_LPM_LowPowerModeEnter()でスリープ動作OKの判断をしているだけです。
LPM以外のStack Examplesでも同様です。繰返しになりますが、Stack Exampleは、利用APIとその利用順序を示します。
従って、自分のソースコードへ取込むには、Developer Assistance内に生成された5個のLPM APIから、R_LPM_Open()を初期設定へ、次に、R_LPM_ LowPowerModeEnter()を無限ループ内の適当な個所へ、コピー&ペーストすれば、LPMスリープモードのソースコードが完成です。
assert(FSP_SUCCESS == err)
assert()は、()内が真の時は、何もしません。偽の時は、発生場所や関数名、ファイル名などをコンソール出力し、プログラムを停止します。API利用後の結果判断に活用しています。
「Stacks毎」に提供されるサンプルコードでは、多くのStack API利用箇所で使われています。
lpm_fpb_ra6e1_wpと比較
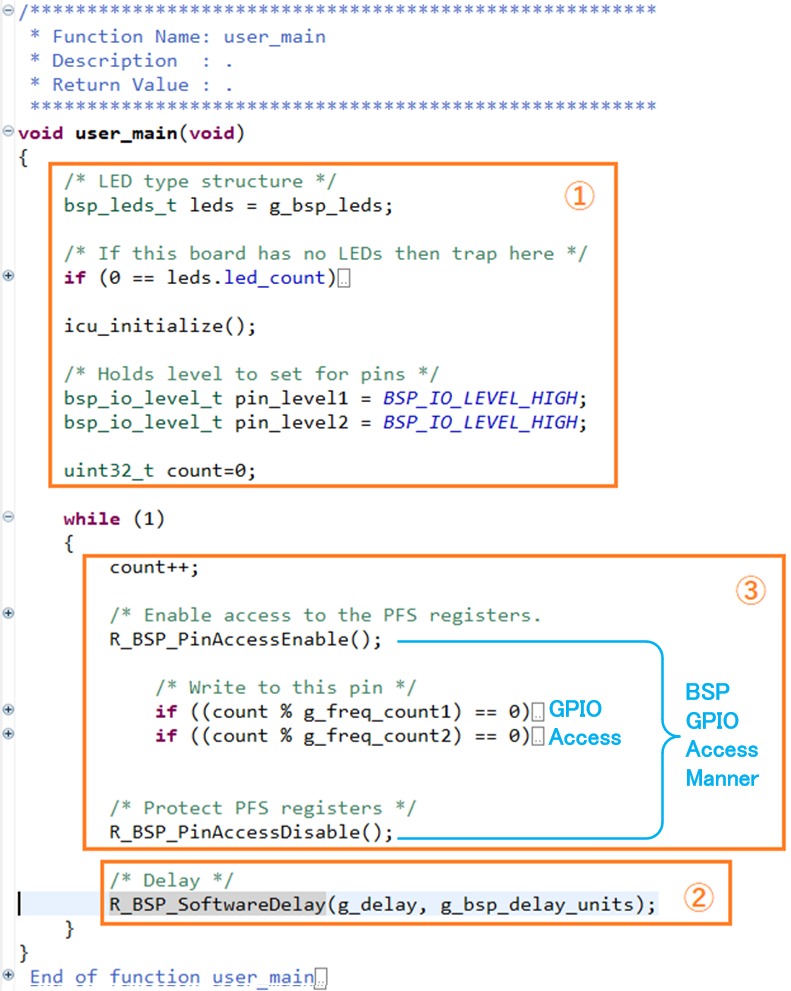
評価ボード毎のサンプルコードにも、低電力動作サンプルがありますので、前章Stack Exampleと比較します。
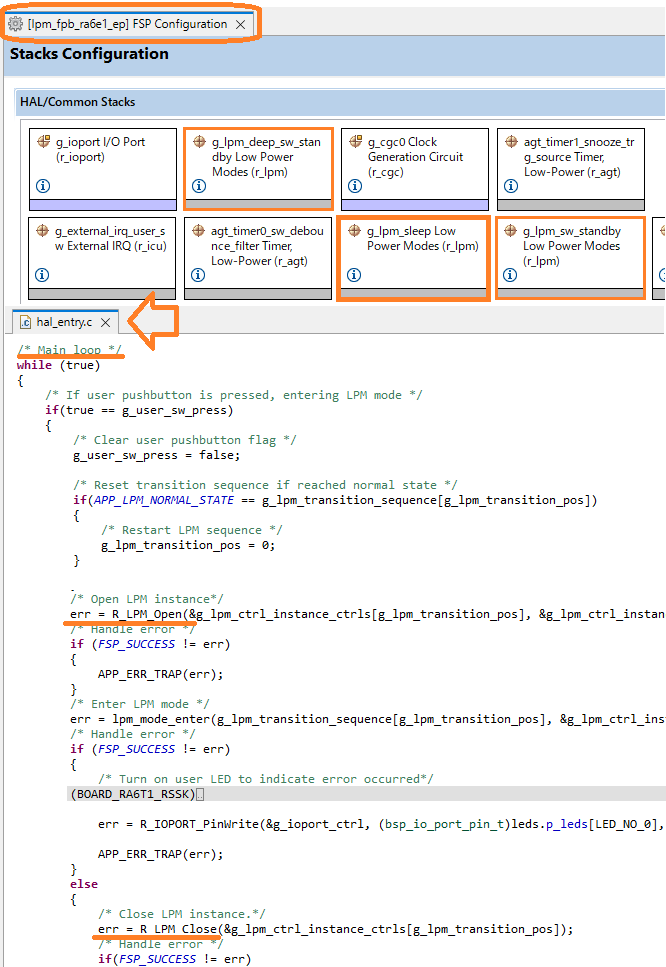
RA6E1の場合は、lpm_fpb_ra6e1_epです。このFSPパースペクティブとhal_entryのMain loopの一部抜粋が上図です。多くのLPM関連スタックが追加済みで、Main loopの低電力動作を解読するのも大変です。
これは、評価ボードサンプルコードが、初めに示した4低電力動作モードの状態遷移を示すプロジェクトだからです。スリープ動作のみを実装する時は、前章LPM StackのExampleを参照した方が簡単に理解できます。
勿論、評価ボードサンプルコードとStack Example、両方を参考にしてソースコードを開発する方が良いことは言うまでもありません。
Stack Exampleが、評価ボードサンプルコード理解を助ける第2のサンプルコードとして役立つことを示したかった訳です。
追加Stacks一覧
本稿は、LPM Stackを例に第2のサンプルコードを説明しました。
FSPパースペクティブへ追加可能なStackは、Stackタブを選択後、右上のNew Stack>をクリックすると一覧表示されます。
まとめ
RAファミリのソースコード開発は、FSPパースペクティブへStackを追加後、一括生成されるDeveloper Assistance内の多くのStack API群の中から、利用APIを適切な順序でソースコードへコピー&ペーストすることで進めます。
利用Stackに複数動作モードがあるなど評価ボードサンプルコードが複雑な場合や、開発者自らが利用Stack APIを検討する場合は、第2のサンプルコードとして、追加Stackのℹ️クリックで得られるExampleに示されるStack APIとその利用順序を参考に、ソースコード開発をする方法を示しました。