弊社メインPCのOSは、Windows 10 Pro 64bit版です。ここ数年続くWindows Updateトラブル状況が改善されないので、バックアップPCのOSは、WindowsからLinux Mint 19.3 MATE 64-bit版へ変更し運用中です。OSがLinuxの場合、自作の古いPCでもWindowsよりも軽快に動作するメリットもあります。
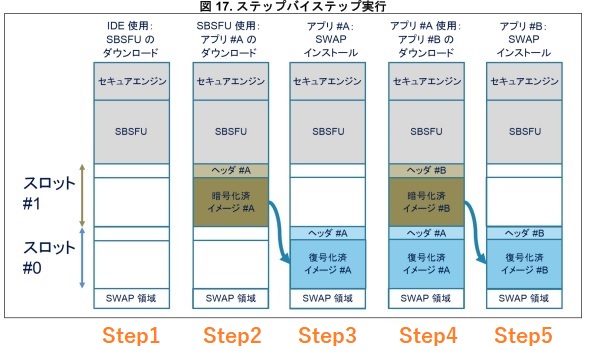
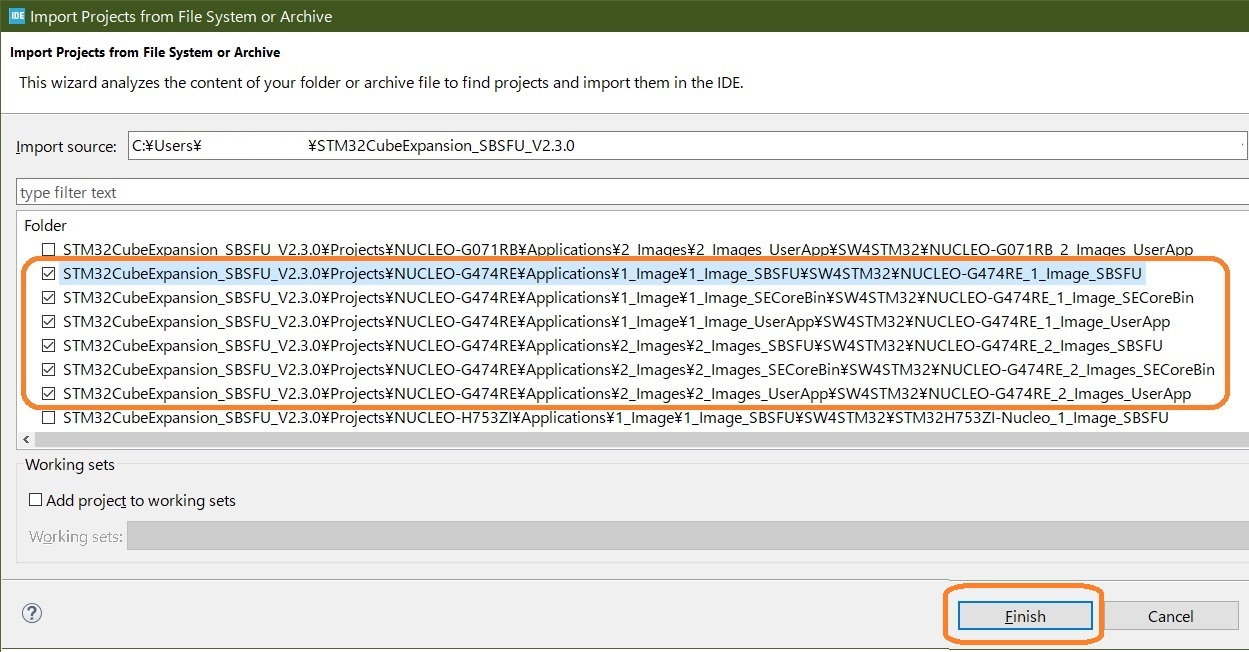
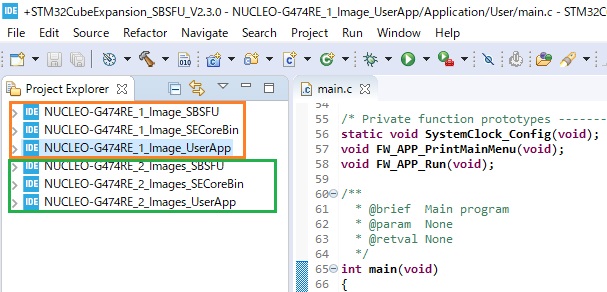
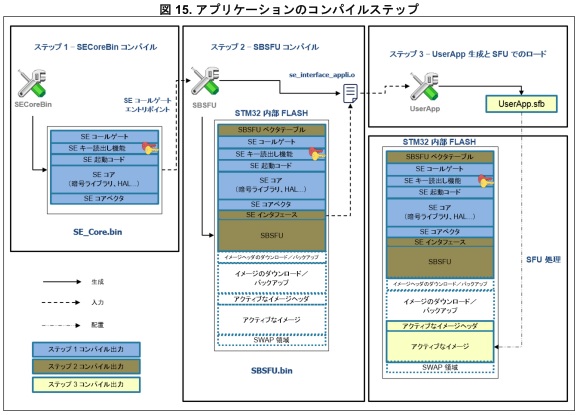
STM32G0/G4シリーズRoot of Trust実現(3)は、第2回で示したSTM32G4評価ボード:NUCLEO-G474RE 利用STM32G4テンプレート開発環境と、デュアルファームウェアイメージのサンプルアプリケーションを使って、セキュア・ブート(SB)、セキュア・ファームウェア更新(SFU)のための準備、その具体的動作の説明をします。
初めに本稿(3)のまとめを示し、最後の章でRoot of Trust実現(1)~(3)全体のまとめを示します。
また、UM2262図18. 評価ボード準備とSTM32CubeProgrammer設定方法が解りづらく、単なるサンプルアプリケーション動作にかなり「苦戦」しました。この部分は、通常アプリケーション開発とRoot of Trust実現開発の切換えとなる重要ポイントです。STM32G4テンプレート発売時には、添付資料にもっと解りやすい説明を加えます。
STM32G0/G4のRoot of Trust(1)~(3)、いかがでしたでしょうか? セキュリティ機能の実装は、IoT MCUでは必須です。従来のMCU開発へ追加する機能や手間、セキュリティ知識も当然必要になります。
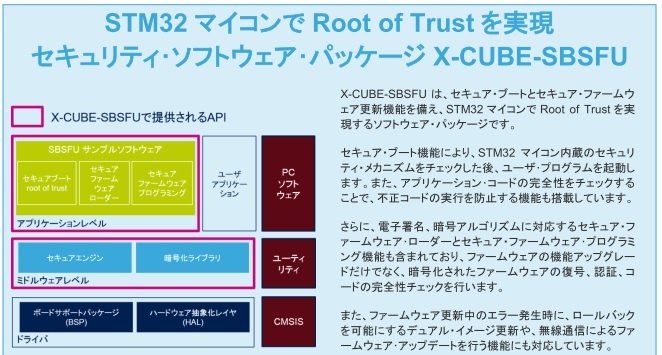
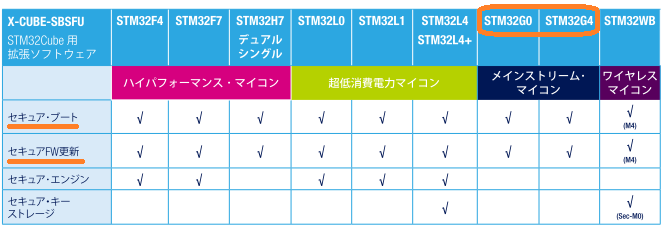
これら追加分は、一般的な開発者が、オリジナリティを加えるべき部分では無いと思います。そこで、これら追加分を、できるだけ簡潔に解り易く説明したつもりです。Root of Trust (1)~(3)で、下記STM32マイコンマンスリー・アップデート2020年3月号P4のX-CUBE-SBSFU説明内容が、より解り易くなれば先ずはOKとします。
STM32マイコンマンスリー・アップデート2020年3月号P4のX-CUBE-SBSFU説明
結局、STM32G0/G4シリーズMCUの場合は、通常のMCUアプリケーション開発が第1段、次に、これをIoT MCU化し、Root of Trust機能(SBSFU)を追加実装するのが第2段という、2段階開発になりそうです。この第2段SBSFU実装時に、本稿で用いたデュアル/シングルファームウェアイメージのアプリケーションサンプルが、枠組みとして使えそうです。
STM32G4テンプレートも、弊社通常テンプレート同様、RTOSを使わない疑似マルチタスク実装用(第1段テンプレート)と、開発済みアプリケーションのRoot of Trust SBSFU実装用(第2段テンプレート)の2つに分けてパックで提供しようと考えています。
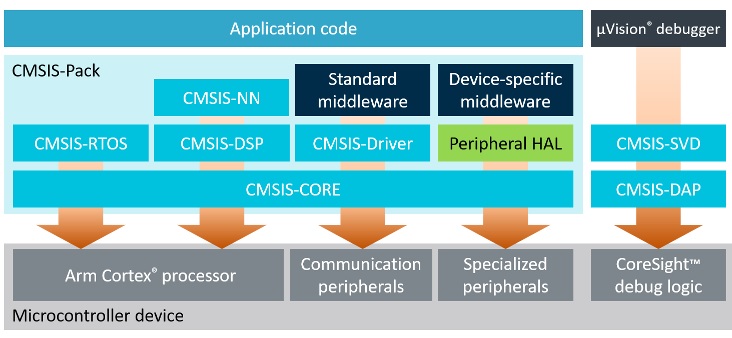
Root of Trust実現で使うSTM32Cube拡張パッケージ:X-CUBE-SBSFUは、STM32MCU間の移植性を重視しているためHAL(Hardware Abstraction Layer)ベースです。
弊社発売中のSTM32G0xテンプレート(Version1)は、高速性を活かすエキスパート向けLL(Low layer)APIが「主」、HAL APIは「従」としてSW4STM32で開発しました。しかし、STM32G0でのRoot of Trust実現には、HALベースのソフトウェア開発が適しています。
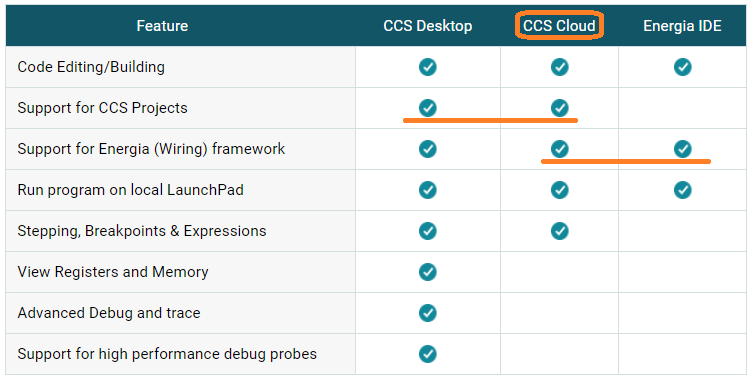
TIは、アナログICやDSP(Digital Signal Processor) 、本ブログ掲載の低電力動作Cortex-M4マイコンMSP432など多くの半導体デバイスや製品を開発・販売しています。ただ、競合他社と比べると、従来は個人調達に便利な通販のDigiKeyやMouserの取扱いTI製品品揃えが少ない傾向がありました。新しいTi.com購入機能は、これを改善できます。
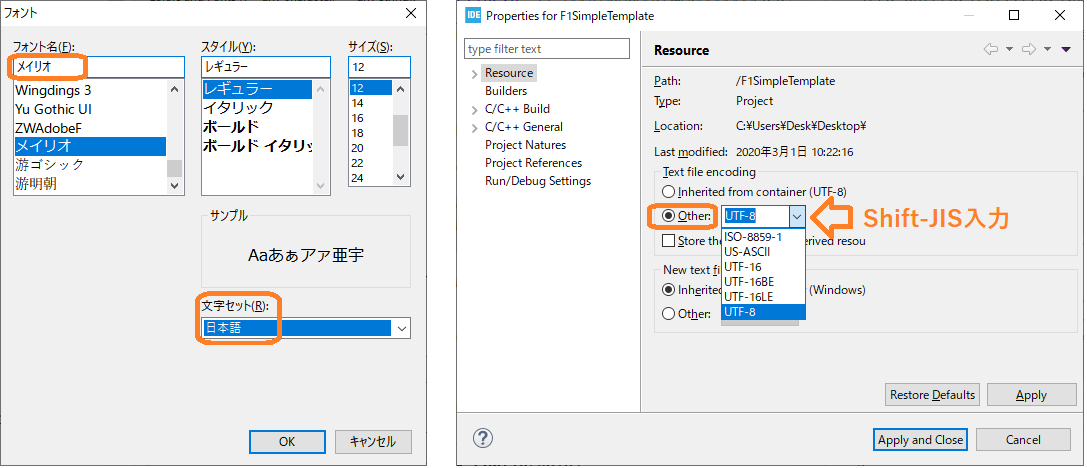
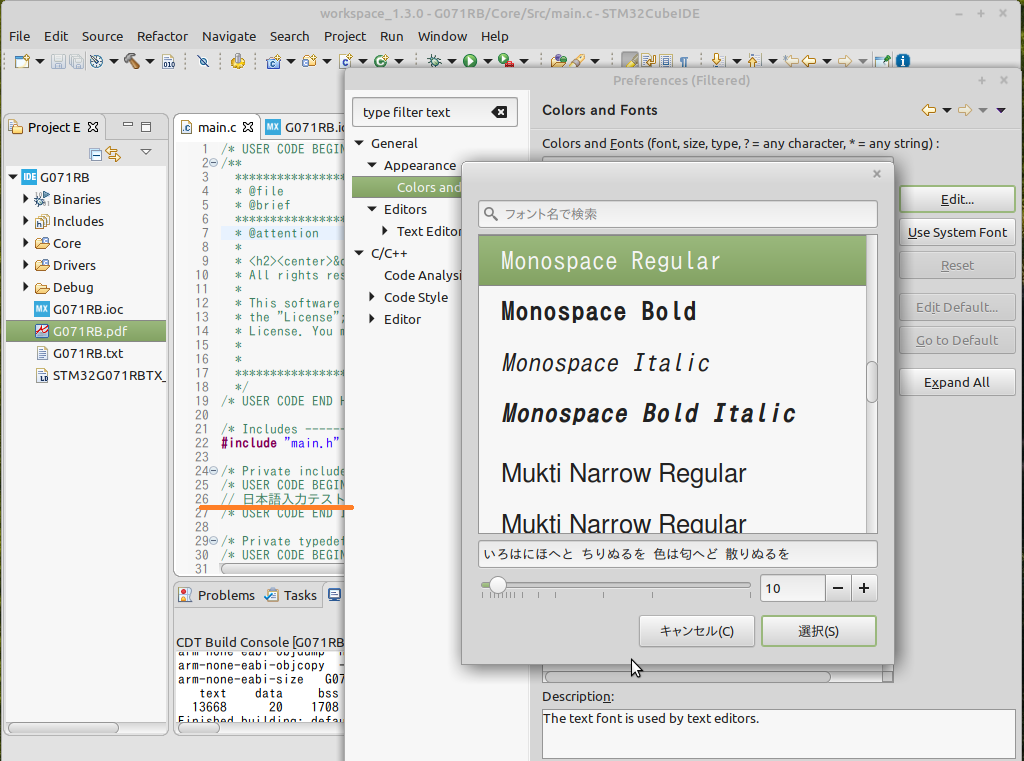
Text file encoding設定を、デフォルトUTF-8からShift-JISへ変更(プロジェクト毎)
※1は、STM32CubeIDEのWindowタブ>Preferenceダイアログ検索窓へ”font”入力>Colors and Font選択>C/C++選択>Editor選択>C/C++ Editor Text Fontを選択し、Edit…クリックで左図表示
※2は、プロジェクト選択>Propertiesクリックで右図表示
右図のようにプルダウンメニューにShift-JIS選択肢が無い時は、Shift-JISと直接入力し、Apply and Closeをクリックします。
MCU設定タイプのAPI生成ツールは、全内蔵ハードウェアAPIを、ユーザ利用の有無に係わらず一括生成するため、規模が大きく、SDK(Software Development Kit)などパッケージ化してIDEへ提供されます。但し、コンパイル時に利用ハードウェアのみをリンクしてMCUへダウンロードするので、少Flashサイズでも問題はありません。
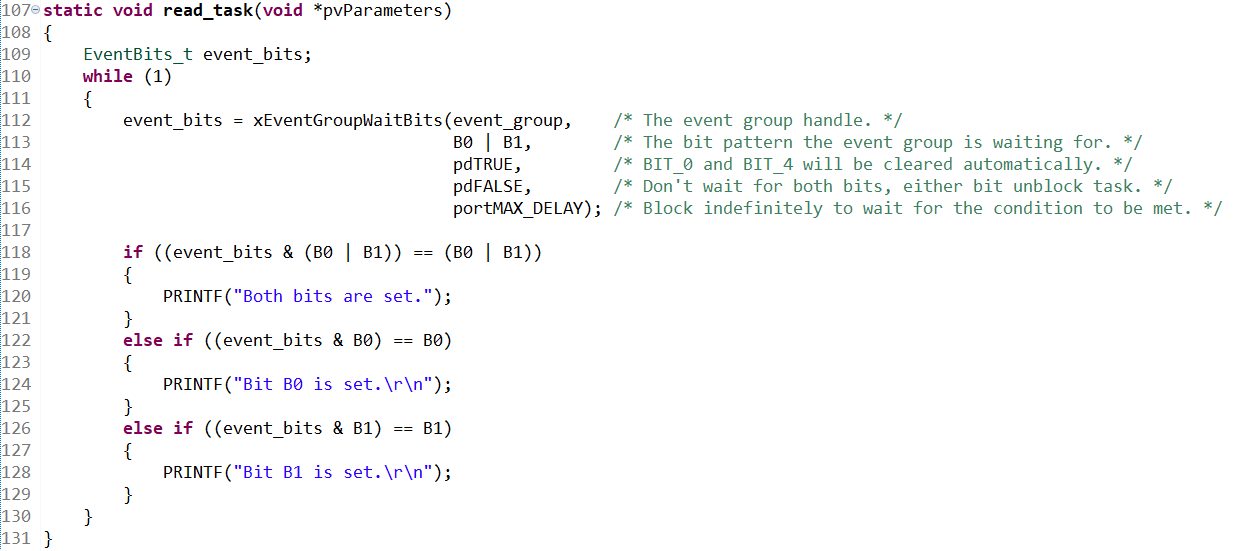
メッセージは、キュー=有限長FIFO(First In First Out)経由で送受信されますので、メッセージの順番は維持されますが、キューが溢れないような使い方が必要です。深すぎるキューはメモリ効率が悪く、浅いキューではメッセージが溢れます。深さ見積もりなどのためにプロトタイプ開発が必要でしょう。
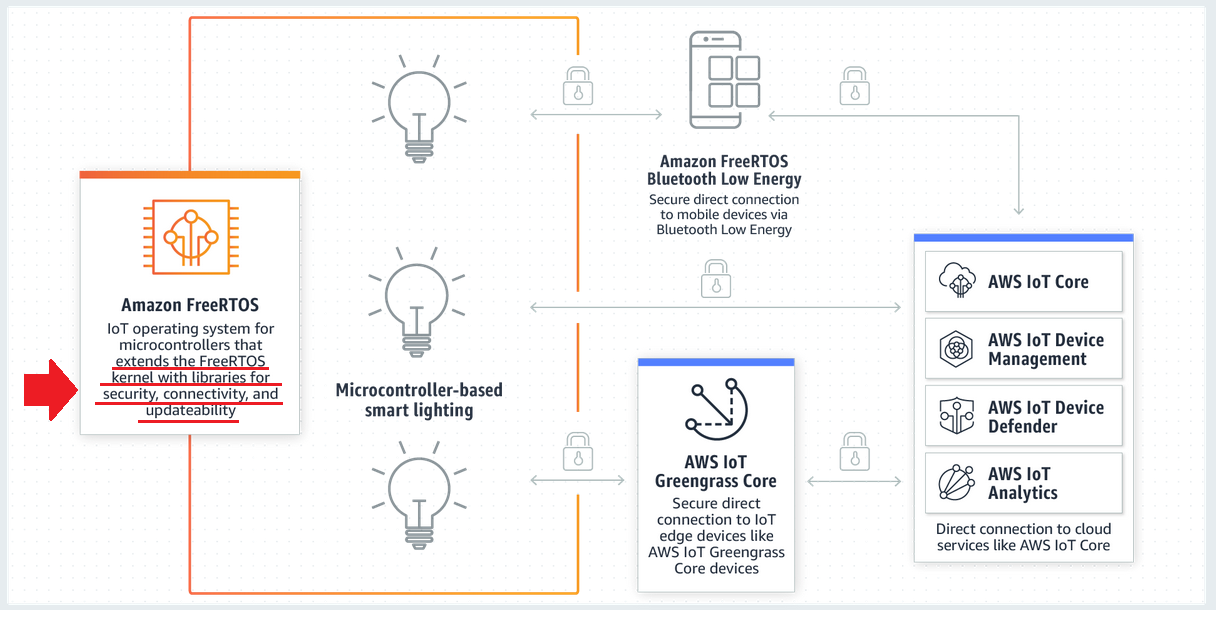
例えば、複数センサ出力をMCUでまとめ、定期的にクラウドへ送信するようなFreeRTOSアプリケーションソフトの素になりそうなプロジェクトです。クラウドサービスにAmazon Web Service(AWS)を使う時には、専用のネットワーク接続ライブラリもFreeRTOSで提供されますので、このアプリケーションとの親和性も良いと思います。