2016年主要マイコンシェア/販売額の記事がEE Times Japanに記載されました。2016年は、主要MCUベンダの買収が盛んでしたが、買収後で集計されているので、MCUの現状が示されています。
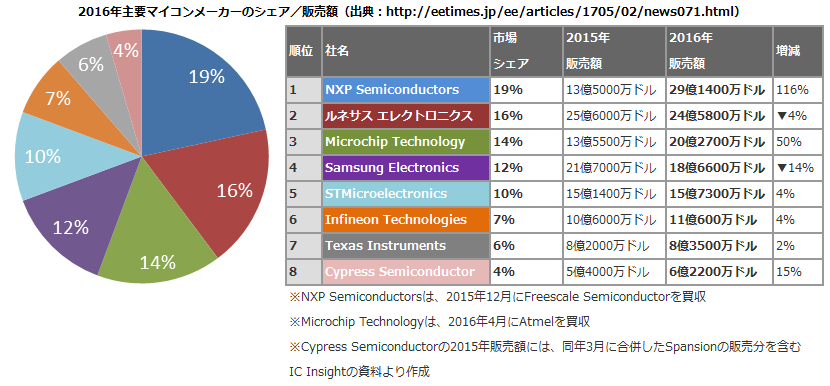
車載半導体はNXPが2015年にルネサスを抜いて1位になっており、2016年のMCUシェア首位とともにNXPの躍進が明確になりました。
NXPの新IDE MCUXpresso
2017年4月時点の最新MCUXpressoIDE_10.0.0_344と、最終LPCXpresso_8.2.2_650の違いは、FreeRTOSタブが追加されたことのみです。残念ながらMCUXpressoのFreeRTOSもv8.0.1のままでした。
FreeRTOS V9はFreeRTOSサイトからダウンロードできます。が、これをMCUXpressoのv8へ手動で上書きインストールして問題なく動作させる自信はありません。FreeRTOS v9がNXPにより提供されるまで待つ方が、トラブルがなく得策と判断しました。
※MCUXpressoは、旧LPCXpressoプロジェクトフォルダがそのまま使えます。
※MCUXpressoに、PE: Processor Expertをアドインし旧Kinetis Design Studio代用とする方法は、調査中です。
マイコンテンプレートラインナップ
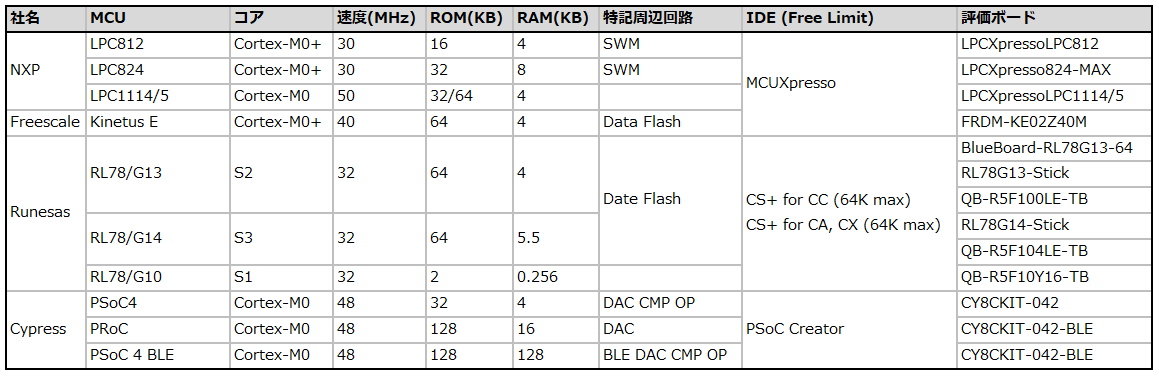
弊社マイコンテンプレートラインナップを、2016 MCUラインキング順に並べたのが上表です。おかげさまでテンプレートは、Runesas>NXP(Freescale含む)>Cypressの順に売れております。が、MCU順位5のSTM向けテンプレートもあれば、と思いました。
STMの場合、Cortex-M0/M0+を対象コアとすると、STM32F0/L0がテンプレートの対象です。しかし、このクラスのMCUへのRTOS適用によるROM/RAM大容量化や、IoT向けMCUの販売個数の増大などを考慮すると、より高性能なCortex-M3クラスも視野に入れた開発も必要か?と思っています。
CMSIS準拠でソフト開発すると、コア差はCMSISで隠蔽されるので、要求性能に応じたMCU選択が可能でクラス別けの必要もなくなります。また、RTOSでマイコンテンプレート相当が本当に必要か?という懸念もあります。
2016MCUシェアから、ルネサスの順位低下傾向が今後気になるところです。また、マイコンテンプレートについても、これらシェアの動きに合わせて、変わり続ける必要性を実感しました。