Node-RED
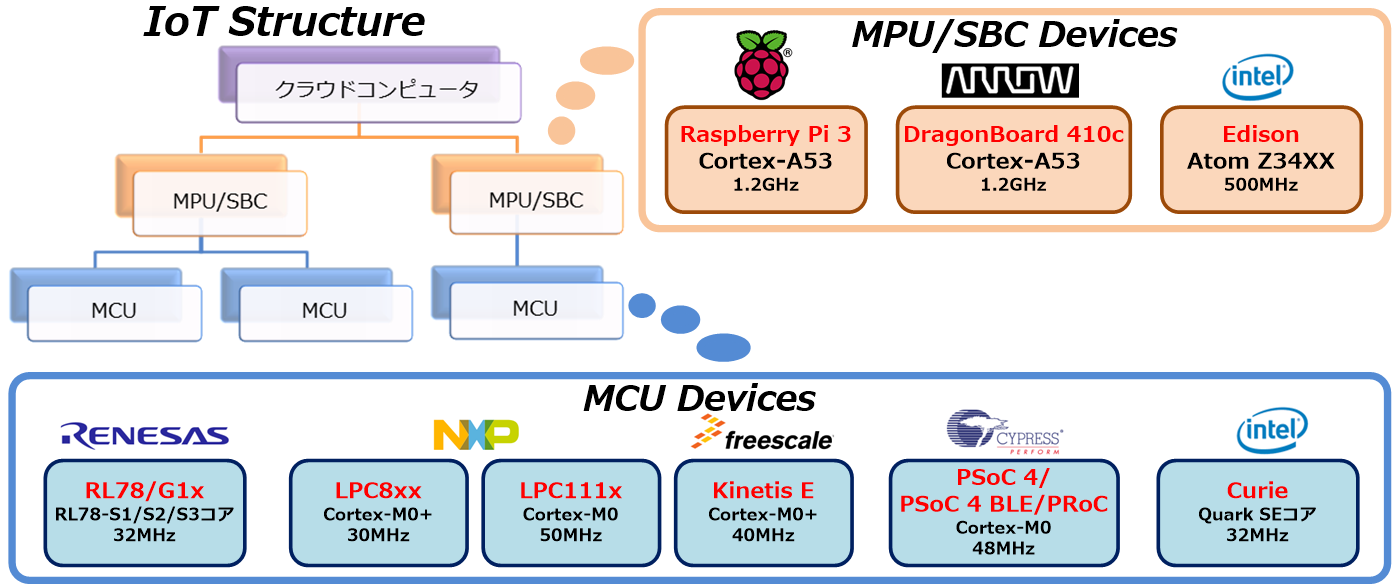
トラ技2016年6月号記載のNode-REDは、強力な開発ツールです。ターゲットは、本ブログのマイコンやシングルボードコンピュータなど全てを含むことができます。但し、あくまでNode-RED動作環境の下での動作が前提です。
つまり、WindowsやLinuxなどのリッチOSアプリの1つがNode-REDで、これを使えば、Raspberry Pi 3とArduino/Genuino 101両方で動作するプログラムが開発できます。マイコンの動作オブジェクトコードは(今のVersion0.13.4版では)出力されません。
今回は、このNode-REDがデバイスに依存せずにプログラミングできる仕組みとprintfデバッグについて考察します。
デバイス非依存性
マイコン開発で苦労する部分は、センサやモータなどの個別制御プログラムです。しかし、この制御プログラムが予めライブラリで提供されていて、しかも、制御する側のデバイス、マイコンかシングルボードコンピュータかもGUIで簡単に選択できれば、苦労はかなり減ります。
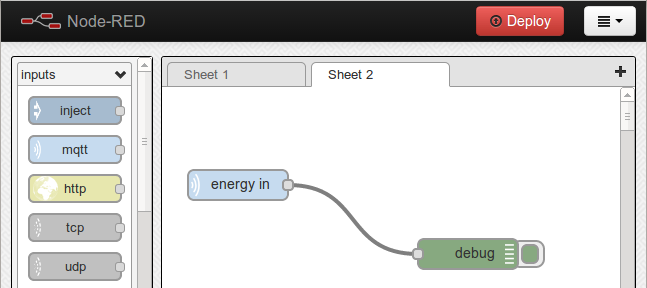
残りの部分は、どの順番でどのように個別制御プログラムを動かすかというフローチャートのイメージに近い部分です。このフローチャートに近い部分を、Node-REDでは「flow」と呼び、ブラウザを使ってGUIで開発します。
ChromeやFirefoxなどのお馴染みのブラウザが使えますので、Windows であってもiOSでも、Linux:Raspbianであっても開発できます。RaspbianをインストしたRaspberry Pi 3もデフォルトブラウザはEpiphanyですが問題なく動作します。
トラ技6月号のP65の図8:GPIOライブラリnode-red-contrib-gpioとJohnny-Fiveの位置づけが、「デバイス非依存性」を端的に示しています。
図8で示されたライブラリとNode-REDのFlowは、オンラインFlowライブラリで多くのサンプルが公開されており、6月4日時点で778個です。☑nodeがライブラリです。
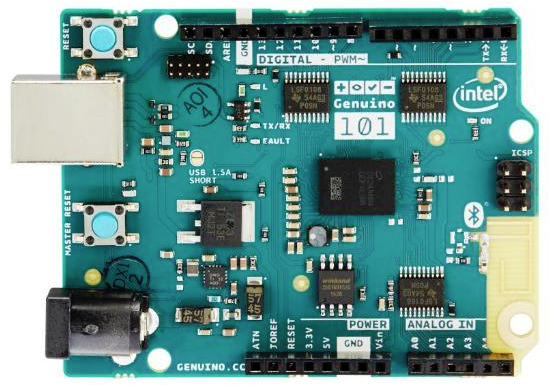
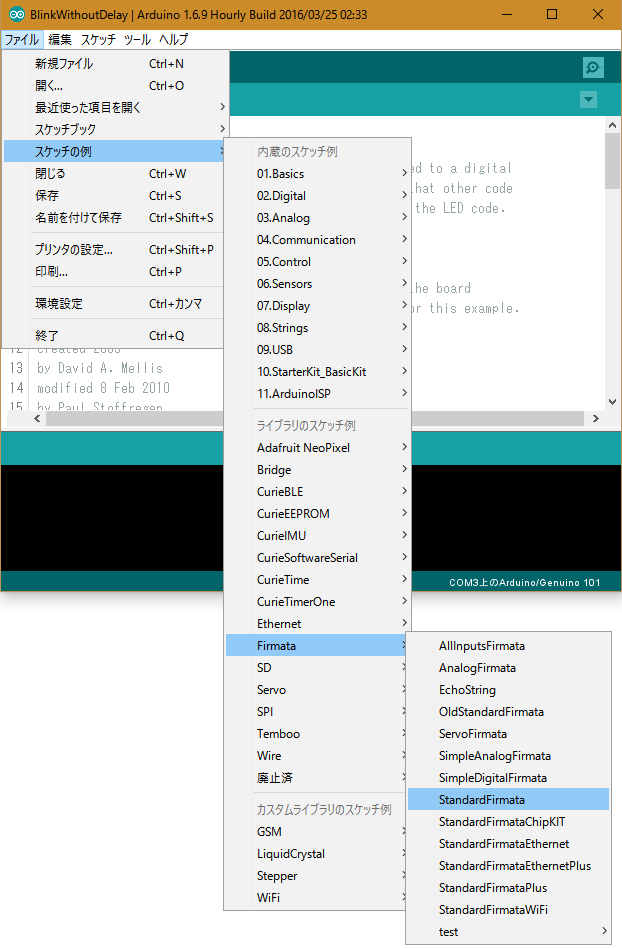
トラ技では、P66のArduino系ボードの中にArduino/Genuino 101は入っていませんが、Firmateプロトコルスケッチをボードへ書き込めますので記事と同様に動作します。このFirmateもCPUやマイコンボードに依存しないプロトコルなので、対象ボードがFirmateさえサポートすればNode-REDから制御できます。
このように、制御に必要なflowサンプルやnodeライブラリを部品として全てネットからダウンロードでき、この部品の加筆修正も簡単にできるNode-REDは魅力があります。ソフト開発時にハード準備が間に合わないことは良くあることですが、実ハードがなくても代替ハードで動作確認し、最後にGUIでポート番号を変更しさえすれば実ハードでも動作することが可能だからです。
printfデバッグ
Arduino IDEも同様ですが、Node-REDには、本格的なデバッガ機能が(今のところ)ありません。
プログラマがprintf(Node-REDは、デバッグ出力ノードに相当)を使って変数などを一時出力してデバッグすることはできますが、動作を一時停止しRAM内容をダンプしたり、変数を変更後に停止位置から再実行したりすることは簡単にはできません。
printfデバッグは、ダウンロードした部品が完全でバグが無いブラックボックスとして扱える場合には効果的かもしれません。例えば、ハードウエア開発で、74シリーズロジックを組み合わせて開発する場合に、ロジックにバグがあると考える開発者はいません。自ら開発したハードをデバッグする際には、プローブとオシロスコープを使って、ロジック間の信号を読み解きバグ取りをします。このプローブがprintfに相当します。
少し前は、マイコンソフト開発でもprintfデバッグが盛んでした。デバッガは高価だったからです。しかし現在は、シリアルーUSB変換機能と兼用でデバッガ機能を持たせた低価格マイコンボードが多数あります(LPC、Kinetis、Cypressマイコンボードなど弊社利用の評価ボード)。
ソフトウエアもハードウエアのように部品化が進めば、printfデバッグで完成する時代がくるかもしれません。しかし、かなり先の話だと個人的には思います。
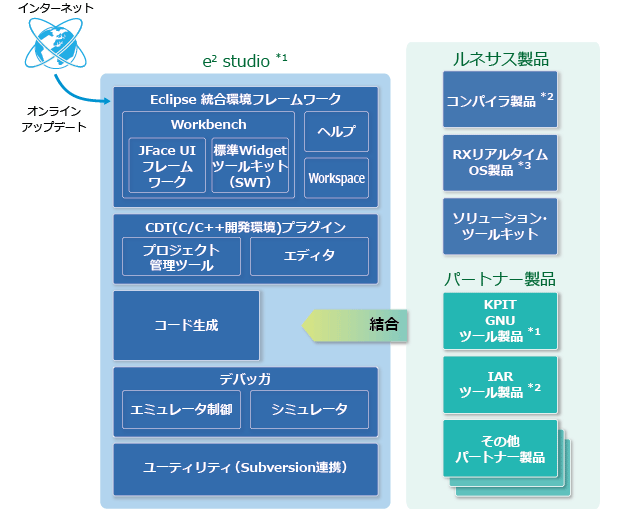
個別マイコンボードのデバッガ機能がプラグインで追加できる開発ツールを望んでいます。EclipseベースのIDEは、この要望に最も近いのかもしれません。
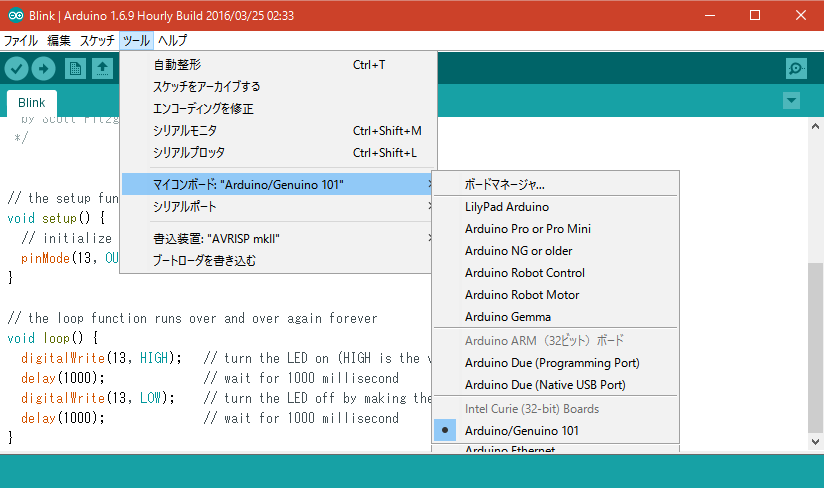
Arduino/Genuino 101用マイコンテンプレート
因みに、Arduino/Genuino 101のIDEは、今のところArduino IDEです。
Intelは、デバッグ機能付きのEclipseベースIDE、Intel® System Studio for MicrocontrollersのQuark™ SE版をアナウンスしていますが、未だにリリースされていません。私は2016年版Eclipse:Neonをベースに使うと思いますので、今少し時間がかかるかもしれません。
従って、Arduino/Genuino 101用のマイコンテンプレートの発売ももう少し後になります。昔ながらのprintfデバッグには、戻りたくないというのも本音です。ご容赦ください。