Windows 10 Anniversary Update、Red Stone 1(RS1)のリリースが8月2日実施されました。
弊社マイコンテンプレート使用中のマイコンIDEを、このWindows 10 RS1、1607で動作確認しましたのでお知らせします。
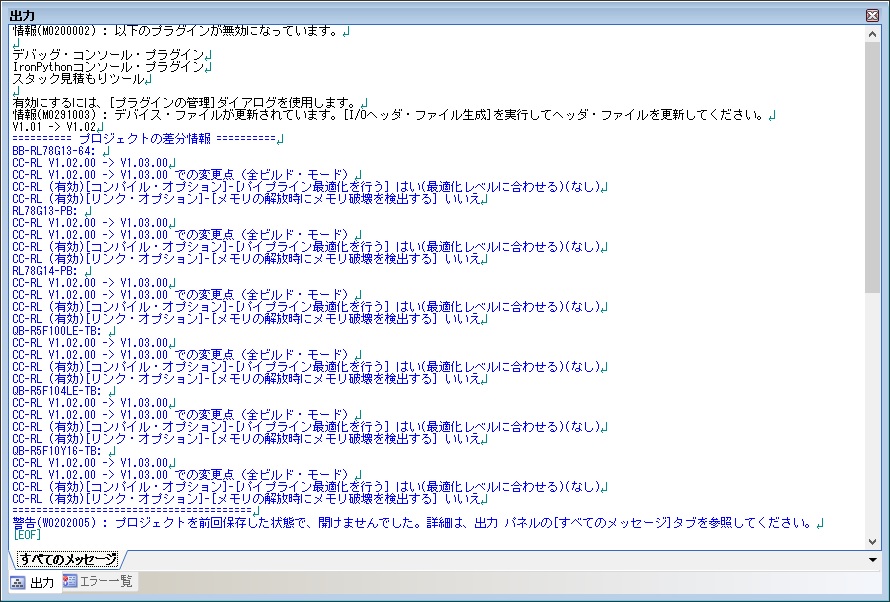
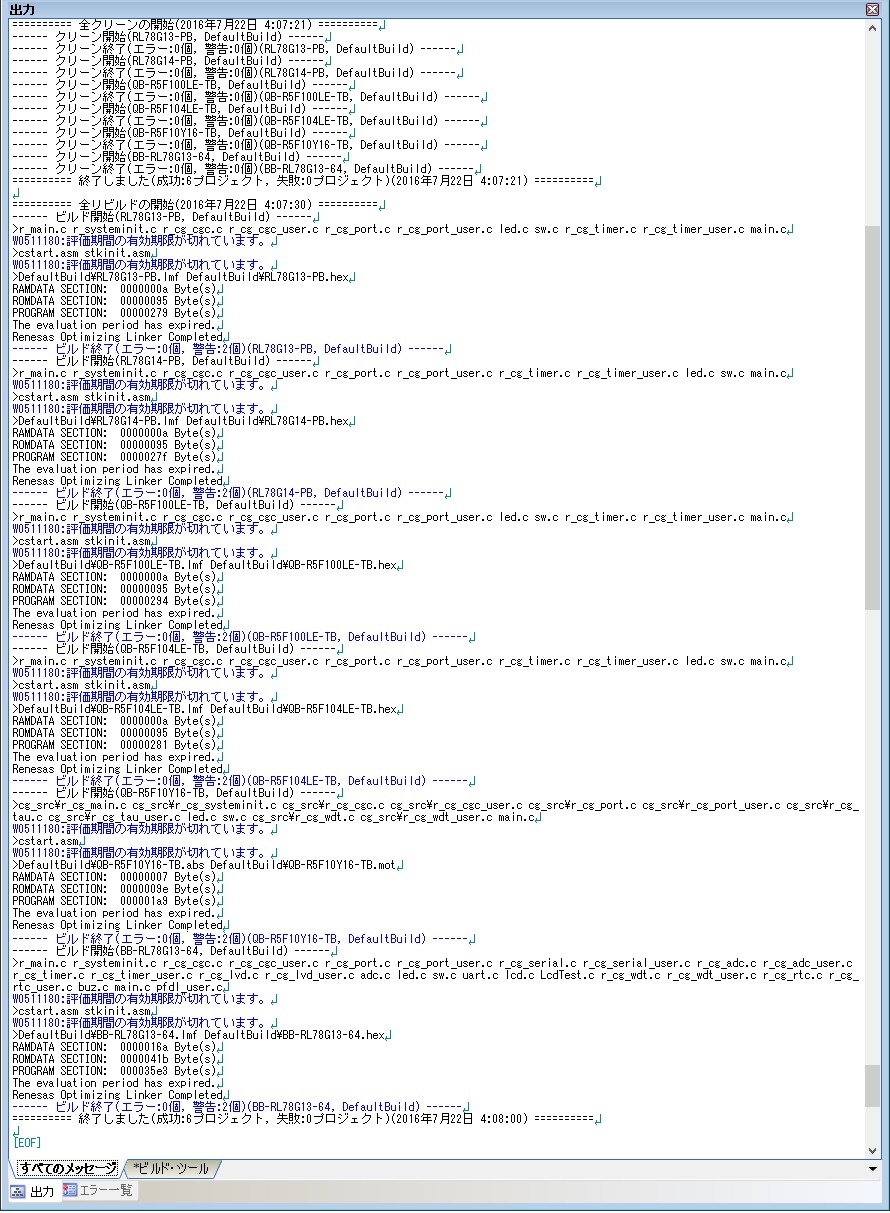
IDEは、全て8月3日時点最新版です。マイコンテンプレートソフトのコンパイルと評価ボードへのダウンロード動作を確認しました。
マイコンIDEの詳細はコチラ、評価ボードはコチラに一覧表を掲載しております。
※Windows10 1511で動作していたものは、今のところ1607でも問題なく動作します。
※Windows 7時代に購入した評価ボードは、一部Windows 10で動作しない場合があります。この場合は、ボードドライバ(USBドライバ)の更新で動作するようになります。
| マイコンIDE(ベンダ名) | Windows 10 1607動作確認バージョン |
| CS+ for CC(ルネサス) | V4.00.00 [15 Mar 2016] |
| e2 studio(ルネサス) | Version: 5.1.0.022 |
| LPCXpresso(NXP) | v8.2.0 [Build 647] [2016-07-18] |
| Kinetis Design Studio(NXP) | Version: 3.2.0 |
| PSoC Creator(Cypress) | PSoC Creator 3.3 CP3 (3.3.0.9604) |
| Arduino IDE(Intel) | 1.6.10 Hourly Build 2016/07/26 |