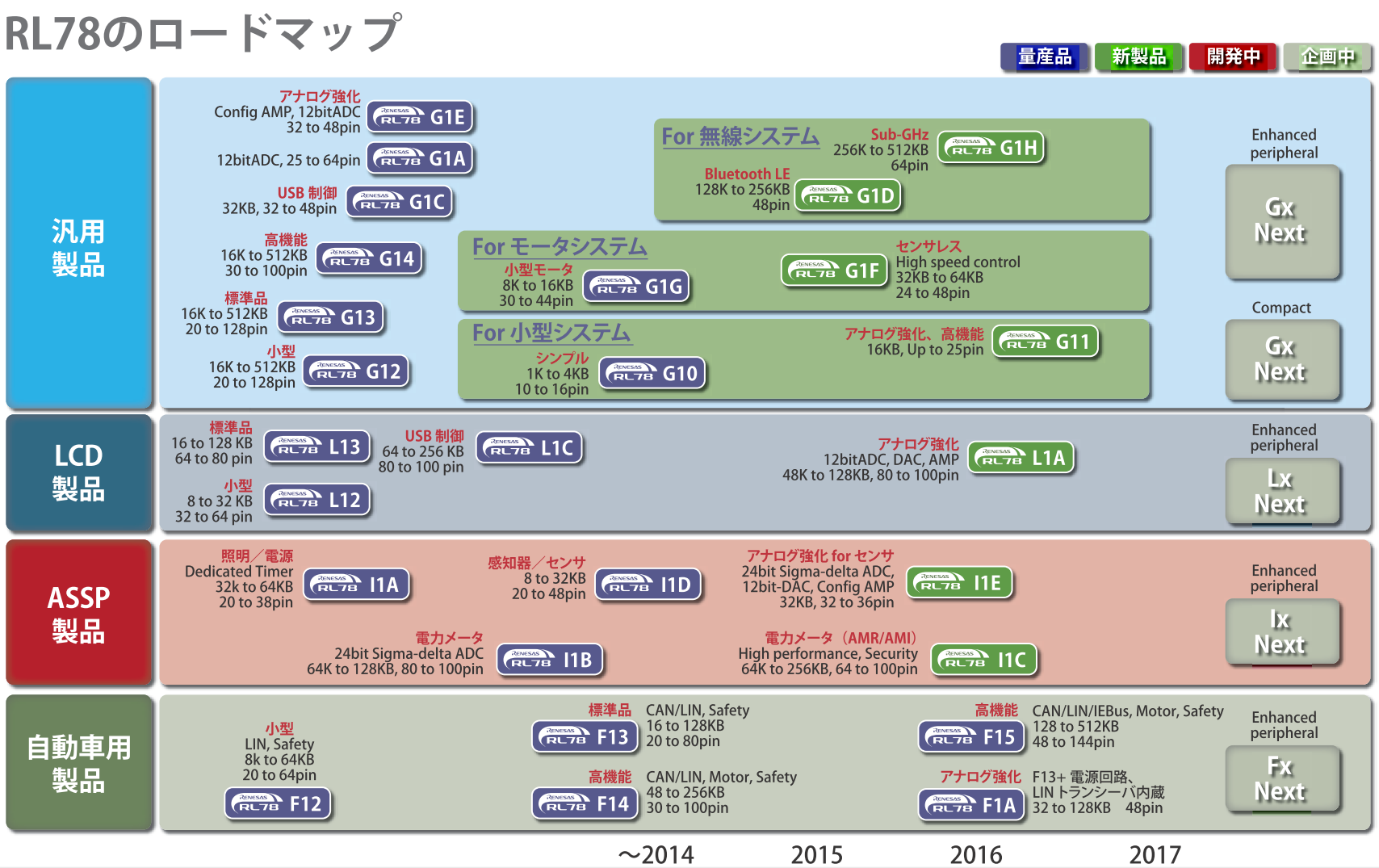
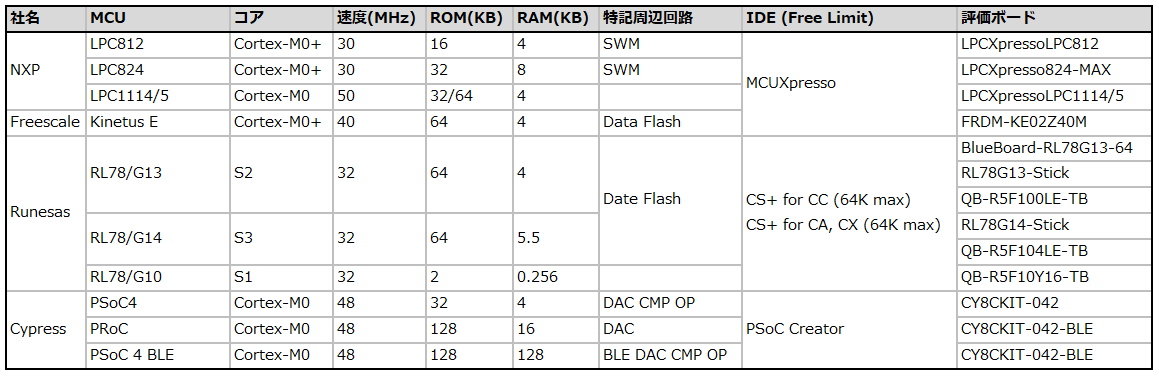
さらに、このアナログ強化とセンサの詳細内容をカタログ記載の各MCUから読むと、S1/S2/S3コアへ、周辺回路PGA:Programmable Gain Amplifierとコンパレータ、ADC/DACを強化した製品であることが判ります。汎用製品でも、よりIoT向けのMCUへ変化しつつあることが、同ページのRL78応用分野からも解ります。
ARM Cortex-M系に勝るRL78の高品質サンプルソフト
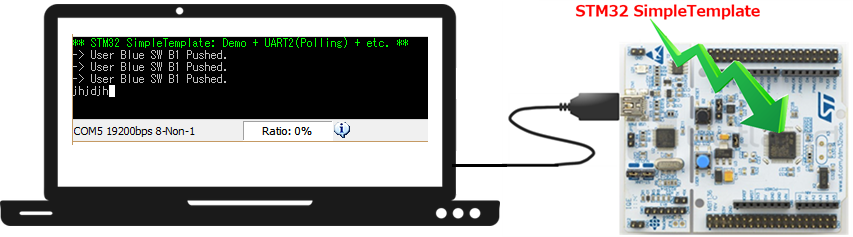
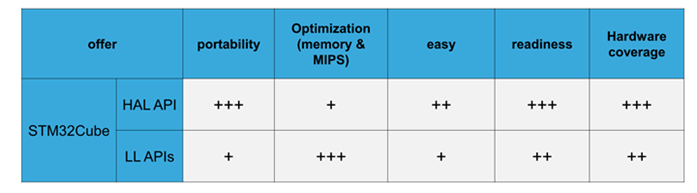
ARM Cortex-M系が全盛な低価格MCUの市場で、唯一独自16ビットS1/S2/S3コアでライバルと争っているRL78。この市場で生き残るには、価格や開発環境の良さに加えて、実際の開発がラク、手軽になることです。
NXP ARM Cortex-M0+マイコンLPCXpresso8xxのLPCOpenライブラリが、v3.01へ更新され、v2.x版から持ち越された多くのバグが修正されたようでした(結論から言うと、LPC81xにはバグが残っています。LPCXpresso8xxのLPCOpenライブラリv3.01は、前回の記事を参照してください)。
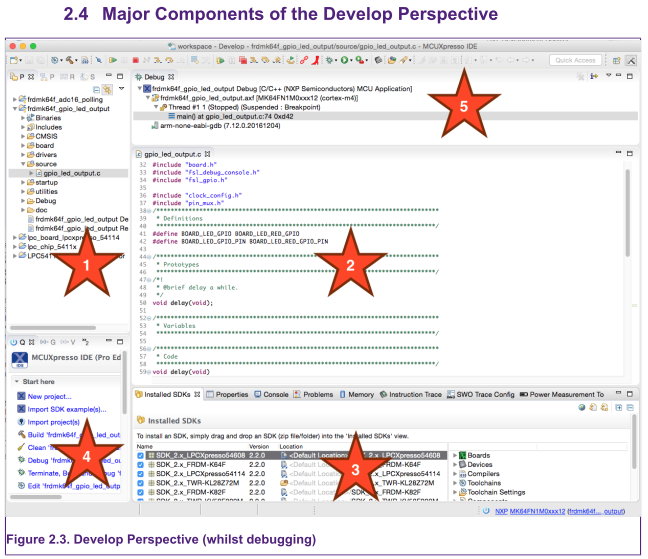
MCUXpressoは、このようなバグの場合に備えて旧LPCOpenライブラリ群も備えています(C:\nxp\MCUXpressoIDE_10.0.2_411\ide\Examplesフォルダ参照)。最新版MCUXpresso IDE v10.0.2_411でもLPCOpenライブラリv3.01が同封されていないのも、本稿で示したバグが理由かもしれません。
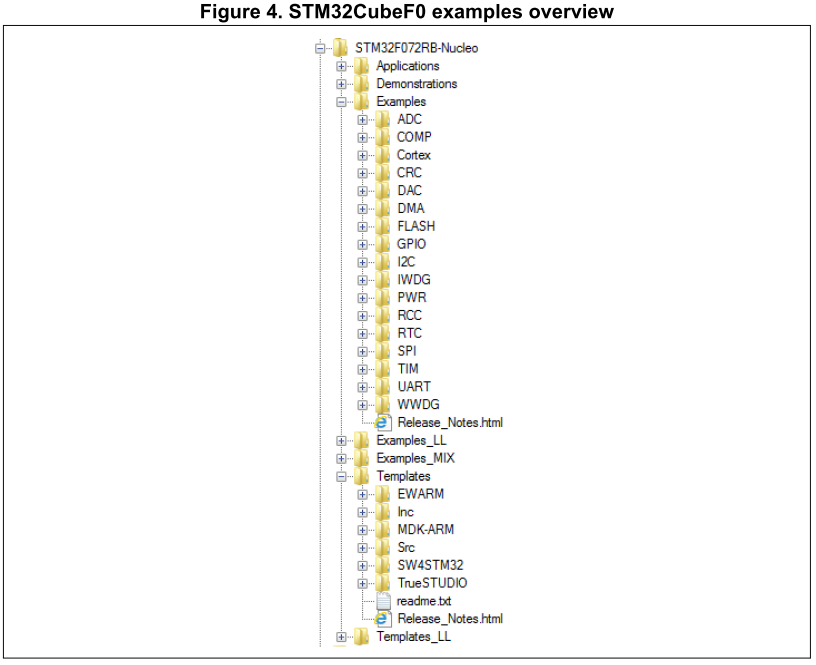
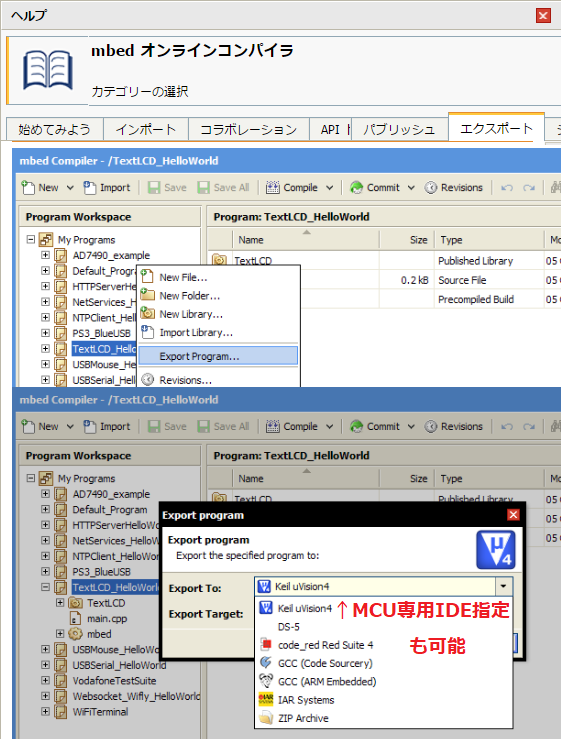
EWARM:IAR社Embedded Workbench for ARM。汎用IDE。無償版32KBコードサイズまで。
MDK-ARM:Keil社Microcontroller Development Kit for ARM。汎用IDE。無償版32KBコードサイズまで。
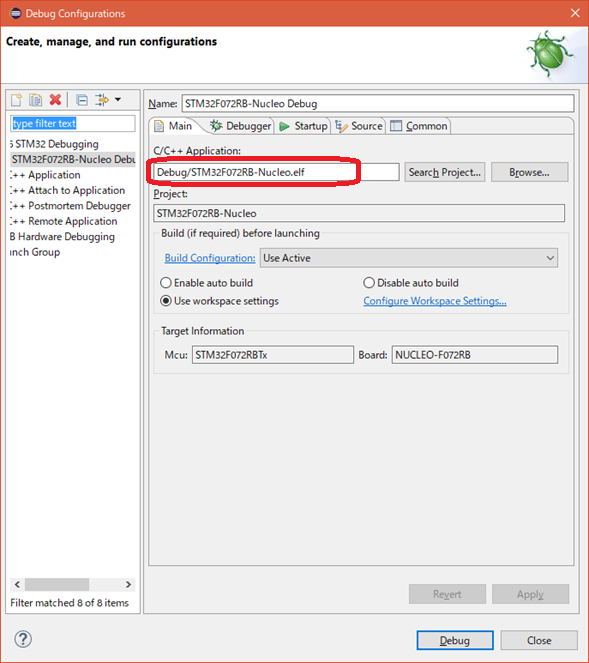
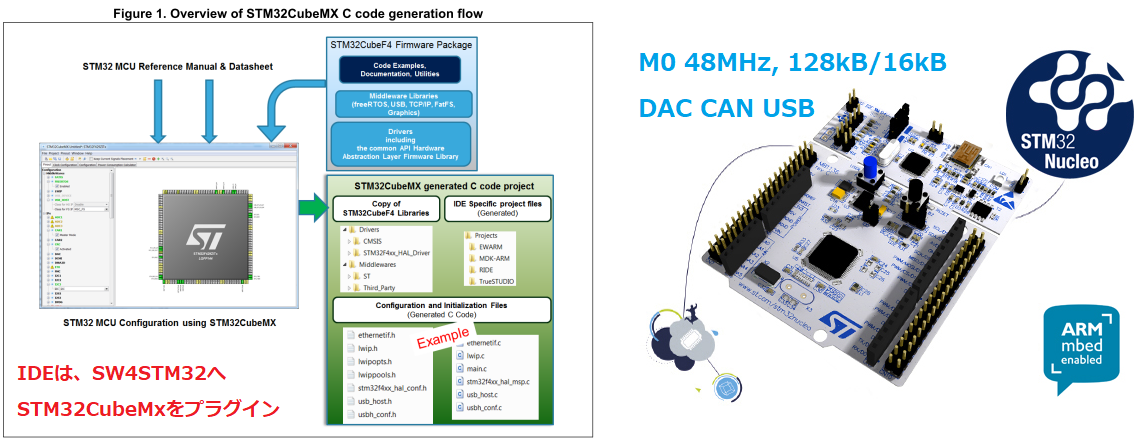
TrueSTUDIO:Atollic社Eclipse ベースSTM32専用IDE。無償版コードサイズ制限なし。
SW4STM32:仏)AC6社マルチOS EclipseベースSTM32専用IDE。無償版コードサイズ制限なし。本ブログはWindows版で説明。
SW4STM32のインストールは、ダウンロードインストーラの実行だけですので、特に問題ないと思います。忘れてはいけないのは、最新版(今日現在v2.0)でもインスト後、Updateが必要な事です。トラブル回避の為にも、SW4STM32のHelp>Check for UpdatesでIDE更新を実行後、次の手順へ進むようにしてください。
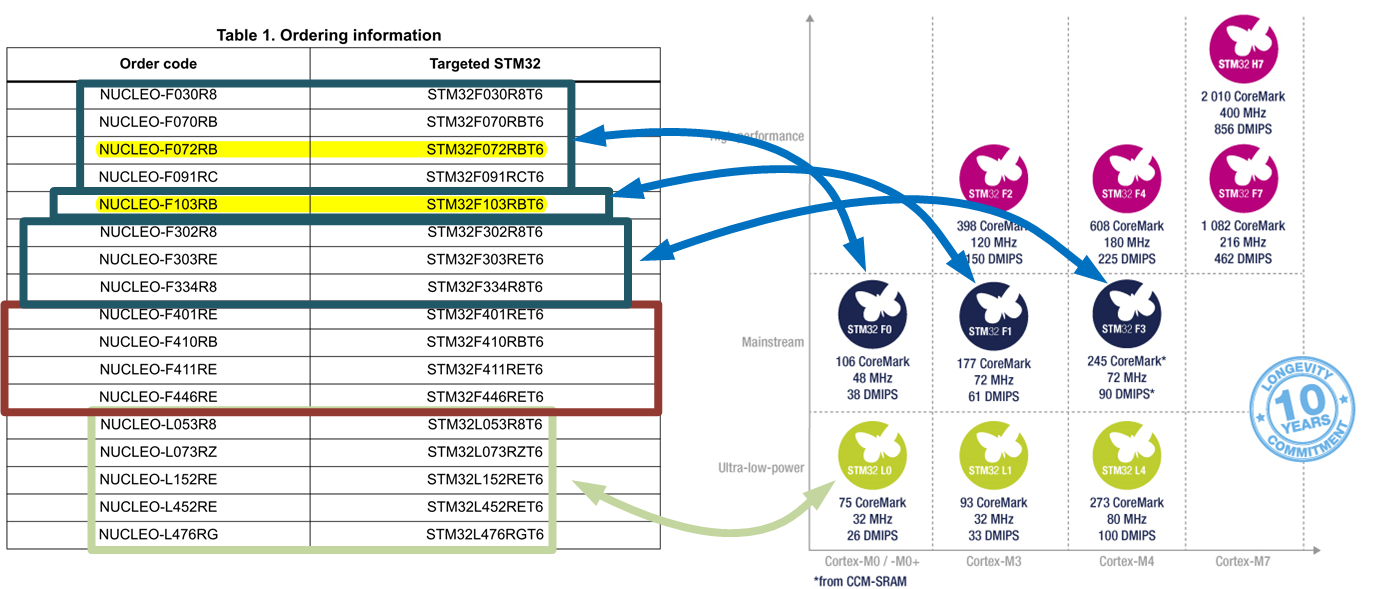
STMサイトに散りばめられたSTM32 MCU情報から、NUCLEO-F072RB選定の決め手となった資料が下記4つです。UM: User Manual、AN: Application Noteです。
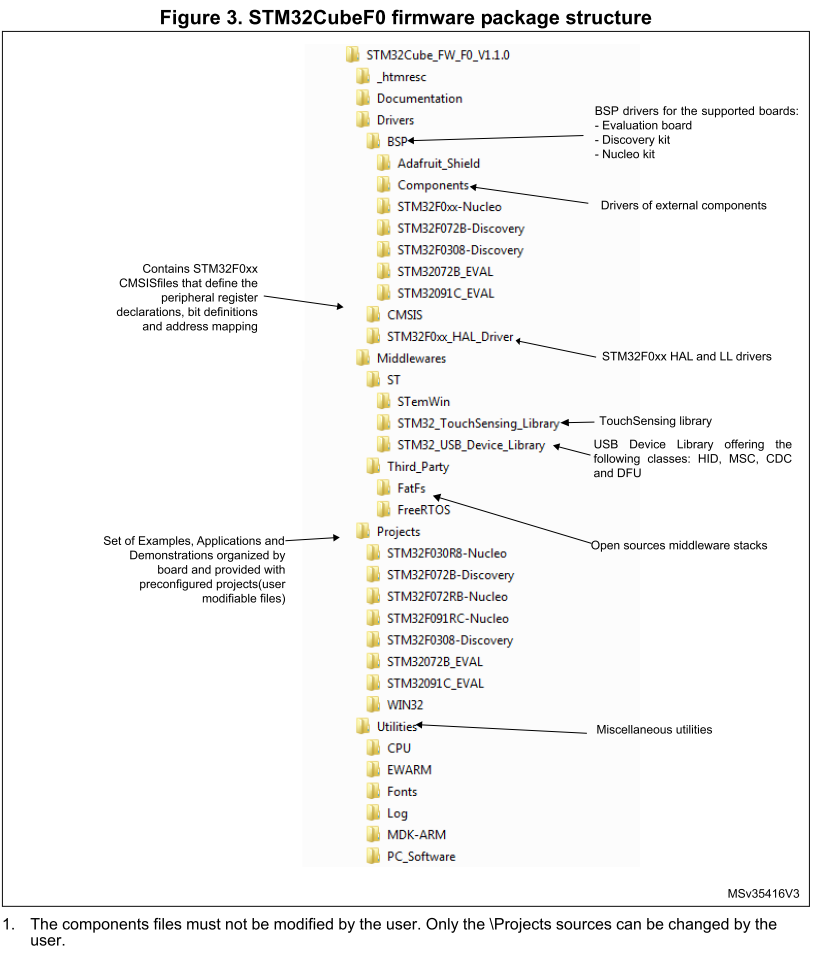
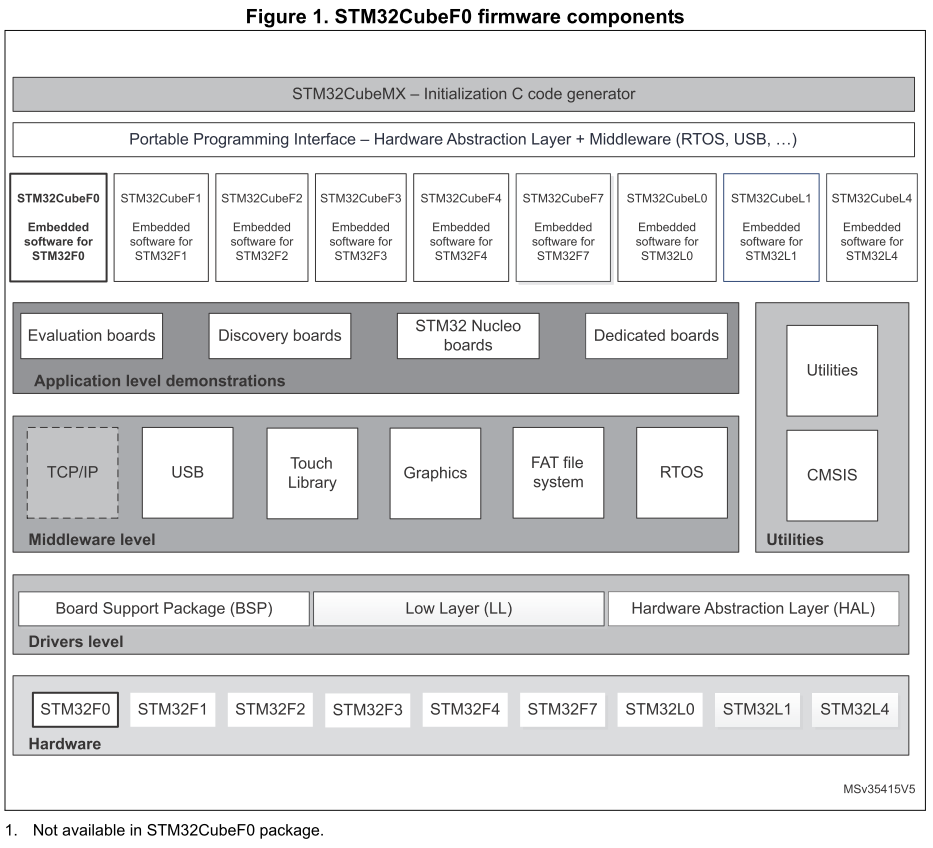
1) UM1779 Getting started with STM32CubeF0 for STM32F0 Series
2) AN4735 STM32Cube firmware examples for STM32F0 Series
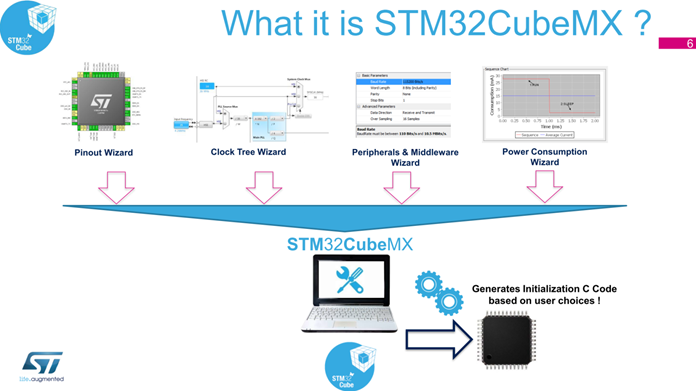
3) UM1718 STM32CubeMX for STM32 configuration and initialization C code generation
4) UM1727 Getting started with STM32 Nucleo board software development tools
これら4つ以外にも、様々な有用資料(例えばAN4617:Migrating between STM32F0 and STM32L0 microcontrollersなど)がサイト内に散りばめられていて、ハッキリ言ってCypressサイトなどと比較すると、平面的で資料が見つけにくいサイト構成です。応答速度も遅いです。
しかし、掲載資料は、いずれも優秀なエンジニアが書いたものと思われ、英文量は多いものの中身は良好です。