

IoT MCUのソフト開発は、RTOS:Real Time Operation Systemが必要になると思います。IoT向けでない通常のMCU開発でも通信UART制御は鬼門です。IoT MCUの通信プロトコルが何に決まるかは今のところ不透明ですが、UARTに比べて複雑な通信処理になることは明らかです。
この対策として、IoT向けMCUのRTOSを数回に分けて解説していきます。連載記事を読めば、RTOSが理解でき、いざIoT MCUで実際にRTOSを使わなければならなくなった時にも慌てずに対処することができます。
背景
本ブログは、IoT向けMCUのRTOS、FreeRTOSやmbed OS 5を記載してきました。これらRTOS関連の資料は、少なからずあります。しかし、1から10まで書いている教科書的な内容で、参考書としては優れていますが、残業時間の制限が厳しい昨今、実務的にはもっと効率的に習得したいのが本音です。
そこで、最低限のRTOS知識とMCU評価ボードを使って、手っ取り早くお金をかけずにRTOSを習得することを目標とします。この目標に沿ってブログ記事を作成します。このための開発環境が下記です。
使用RTOS:FreeRTOS(NXPのIDE:LPCXpresso無料版に付属)
MCU評価ボード:NXP LPCXpresso812またはLPCXpresso812/824-MAXまたはLPCXpresso1114/5
※記事ではFreeRTOS v8.0.1、LPCXpresso v8.2.2、LPCOpen v2.19(いずれも2017年2月最新のLPCXpresso無償版に付属)とLPCxpresso824-MAXを使います。
※FreeRTOS Documentationにある“Mastering the FreeRTOS Real Time Kernel – a Hands On Tutorial Guide”が参考書としてお勧めです。
MCUのLPC812/824、LPC1114/5で動作するFreeRTOSがポーティング済みで、かつ秋月電子などで低価格で入手性が良いMCU評価ボードで動作確認できることが選定理由です。
因みに、LPCXpresso812/1114/1115評価ボードで動作する弊社マイコンテンプレートも販売中です。このマイコンテンプレートによる従来ソフト開発と、FreeRTOSによるソフト開発の違いなどでRTOSの特徴を浮き彫りにします。
RTOSの必要性
評価ボード実装済みのLEDを点滅させるいわゆる「Lチカ」サンプルソフトを、FreeRTOS利用時のソースの一部(左側)と、RTOS未使用の通常ソフト記述(右側)を示します。最大の違いは、無限ループの数です。
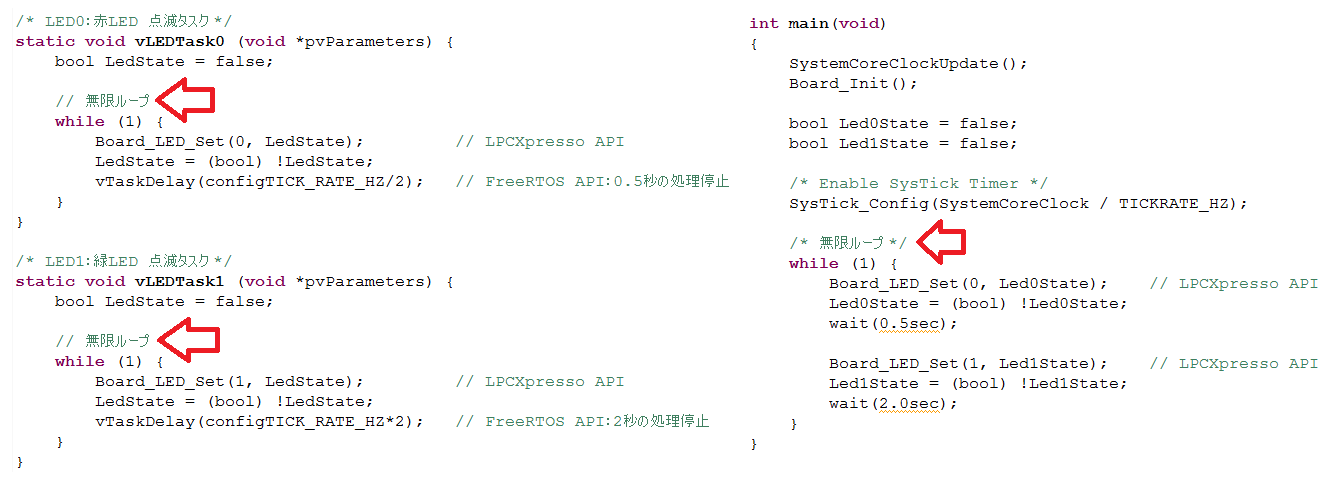
FreeRTOS記述の場合、1個のタスク(≒ユーザ処理単位)で1個の無限ループを持ちます。一方、通常ソフト記述の場合は、全体で1個の無限ループのみです。1個の無限ループ内で様々なユーザ処理を行うため、ループ内の1処理時間の長さ、短さ、待ちがその他の処理へ影響を与えます。
RTOSを使う最大の利点は、1つのタスク実行時間の影響が、他のタスクへ及ばないことです。
このおかげで、あたかも1つのMCUを占有するかのようにユーザタスク記述ができます。従って、1個のタスクが、1個の無限ループを持つのです。複数のタスクへ優先順位に応じて実行時間を振り分けるのは、RTOSの役目です。
ユーザタスクは、他のタスクのことを気にせずに記述できるため、シンプルな処理になりタスク単位の可搬性も向上します。
RTOSでのユーザタスク記述は、通常ソフト記述と何ら変わることはありません。1無限ループ内にシンプルな処理を記述すれば良いのです。ただし、RTOS利用のオーバーヘッドとして、タスクの登録や優先順位の設定は別途必要となります。
要はRTOS APIを追加するだけ!
RTOSのLチカサンプルソースは、FreeRTOS APIとLPCXpresso API、残りがC言語の3構成です。
LPCXpresso APIとC言語は、通常ソフト記述時に使うものと同じです。FreeRTOS APIは、APIの頭に必ずx…、v…、ux…などが付いています。これらの接頭語は、FreeRTOS以外のRTOSでも同様です。RTOSユーザタスクの記述は、通常ソフトの記述に、これらRTOS APIが加わったのみです。
従ってFreeRTOS APIの使い方を理解すれば、FreeRTOSに限らず他のRTOSへも応用可能です。使用頻度が高いFreeRTOS APIの使い方を習得すれば、基本的なRTOSユーザタスク開発ができると思います。この方法でIoT MCUにRTOSが適用された時でも、慌てずに備えることができます。
まとめ
今回は、RTOSの利点を説明しました。RTOSが複数ユーザタスクの優先順位に応じてMCU実行時間を振り分けるので、個々のユーザタスクはシンプルで可搬性に優れた記述ができます。
IoT MCUの通信処理はUARTに比べ複雑です。この複雑さは、再送データ数や外来ノイズなどの通信環境により様々に変化します。RTOS無しの通常ソフトでこれらに対応するには複雑すぎると思います。
この対応には、RTOSが期待できます。しかし、RTOS習得には初期段階で手間と時間が掛かるため、実務的で手軽に習得できると筆者が思う1習得方法を示しました。
今後も、FreeRTOSのポイントをできるだけ簡潔に説明していきます。詳しく知りたい方は、お勧め参考書などを参照してください。