LPCXpressoとKinetis Design Studioが新しいMCUXpressoへ統合されました。Windows 10 Version 1703で動作確認したMCUXpressoの概要について示します。
MCUXpresso概要
MCUXpressoの概要は、コチラの4分程の英語Videoが良く解ります。ポイント抜粋すると以下になります。
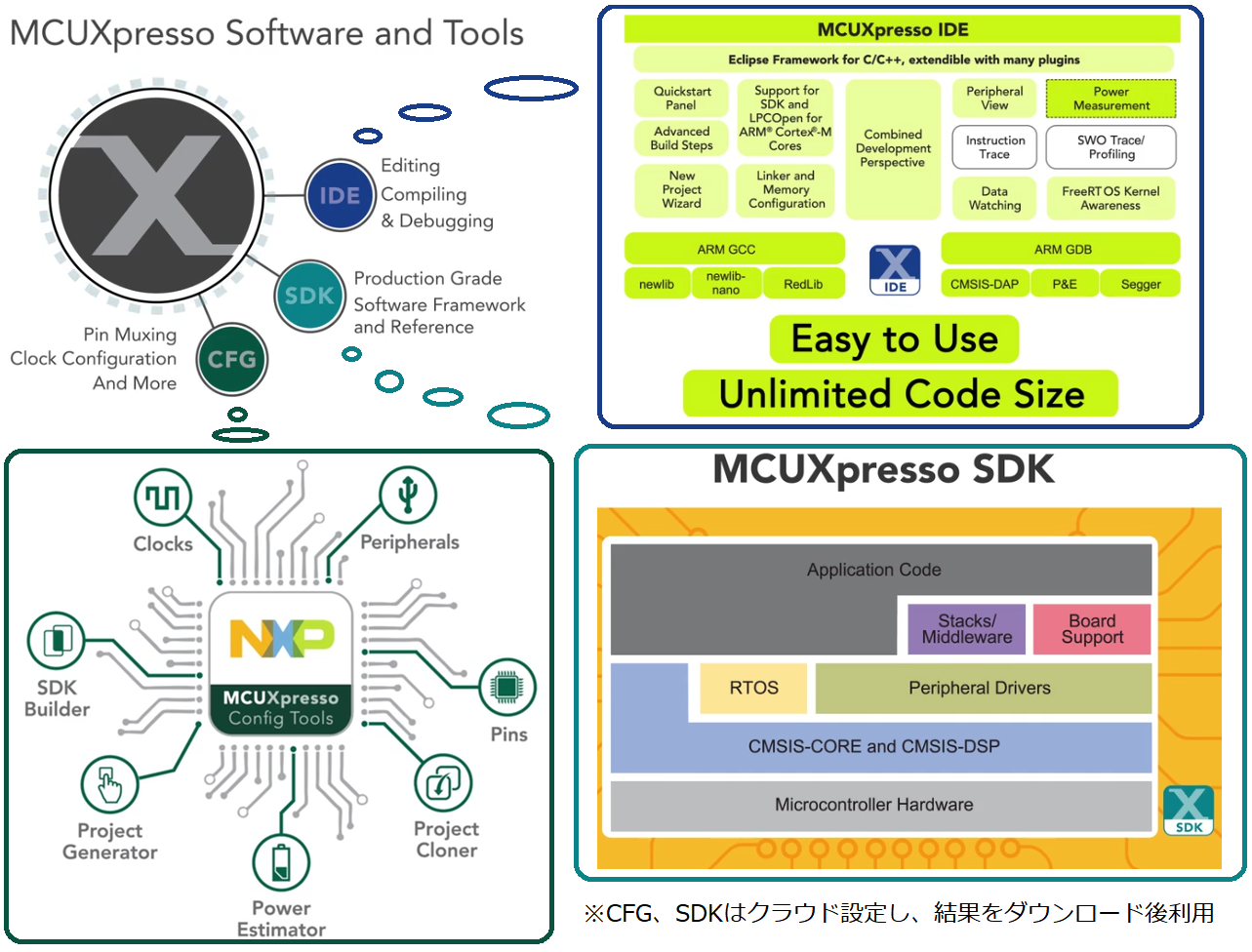
MCUXpressoは、3つのツール:IDE、SDK、CFGから構成され、各機能が下記です。
- IDE機能:ソースエディト、コンパイル、デバッグ。Eclipse 4.6ベース。ローカルPCで利用。
- SDK機能:使用デバイスのAPI生成とサンプルソフト提供。クラウドで設定し、結果をIDEにダウンロードして利用。
- CFG機能:使用ピン、動作周波数など設定。クラウドで設定し、結果をIDEにダウンロードして利用。
全てが1パッケージのローカルPCで機能した旧IDE(LPCXpressoやKinetis Design Studio)を、MCUXpressoで3ツール構成にしたのは、SDKとCFGをクラウド側で分離提供し、IDEを軽量化することと、CMSIS準拠の開発環境構築が目的だと思います。CMSISはコチラの記事を参照してください。
CMSIS準拠ならMCUハードとソフトの分離が容易になり、開発済みアプリケーション資産を少ない工数で別ハード移植や再利用が可能です。また、CMSIS仕様(CMSIS-COREや-DSPなど)が修正/更新されても、その内容は全てクラウド側のSDKとCFGツールに閉じ込めることができるので、常に最新CMSIS準拠のSDKとCFGを利用したソフト開発が可能です。
ARM Cortex M系のIDEは、今後この分離構成が流行するかもしれません。
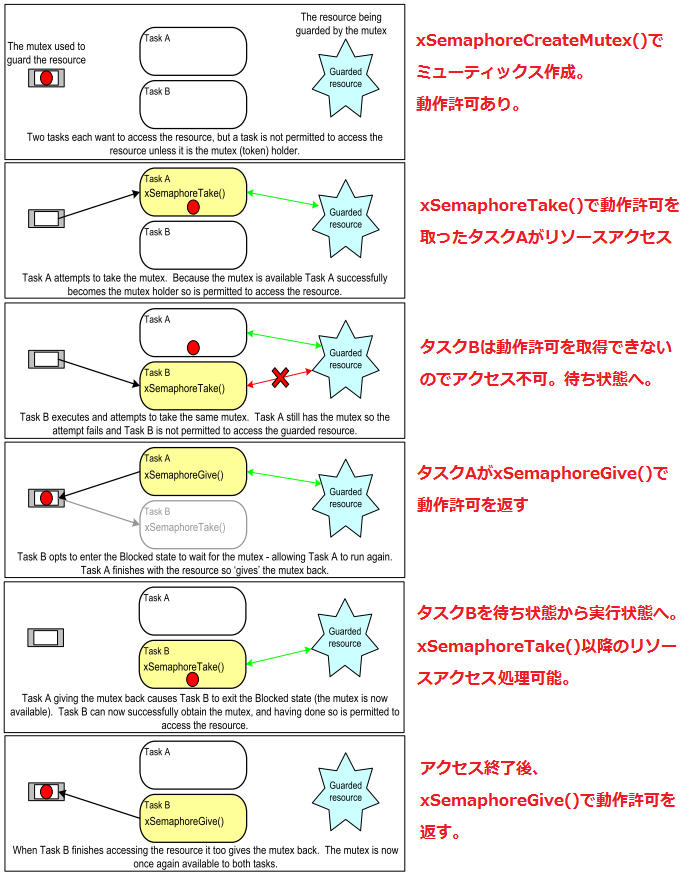
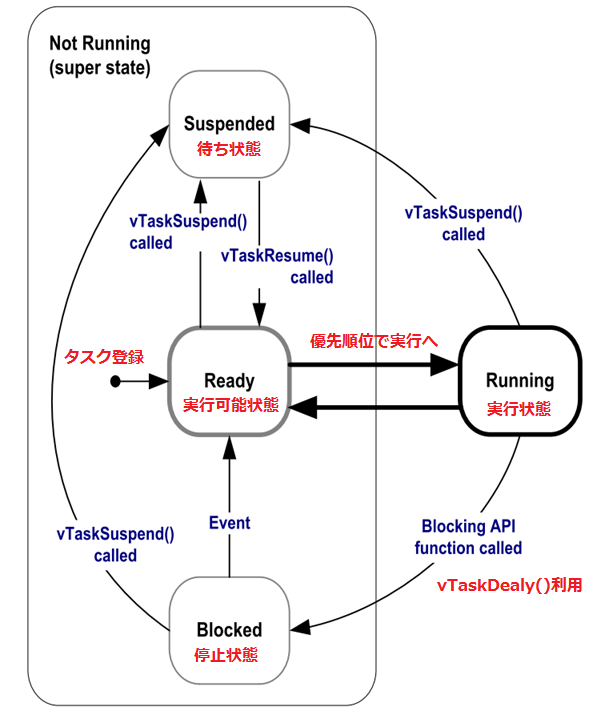
注目点は、IDEではコードサイズ制限なし、SDKではFreeRTOS v9提供(LPCXpresso最終版はv8)、CFGでは電力評価やプロジェクトクローナーです。各ツールの概要を以下に示します。
MCUXpresso IDE
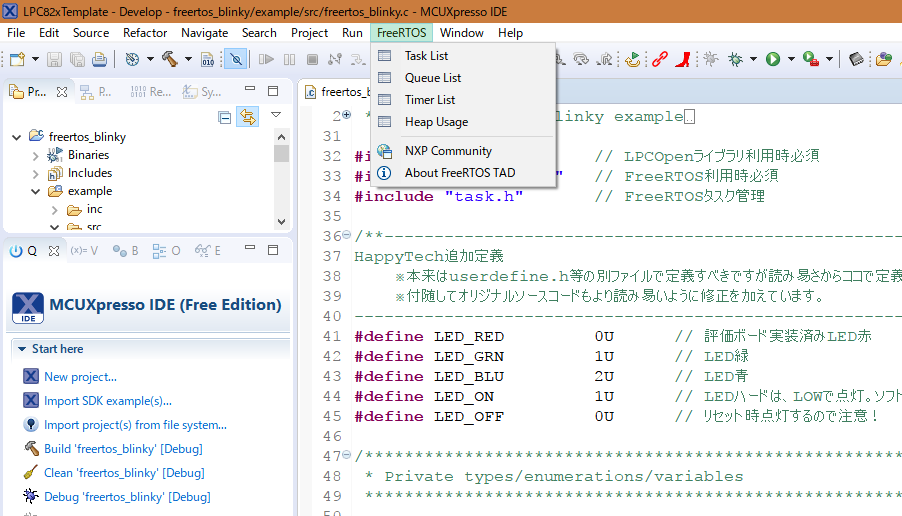
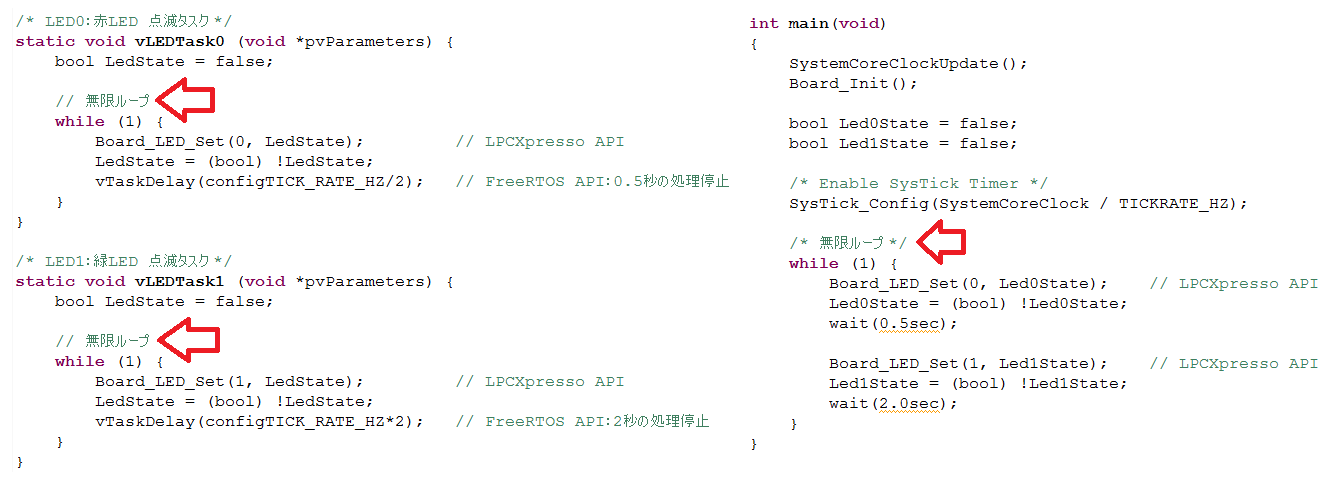
旧LPCXpressoとの差分は、FreeRTOSタブが新設されたこと位です。コードサイズ制限なしで、添付マニュアル類も判り易く、誰にでも使い勝手が良いIDEです。MCU開発は、従来のRTOSを使わないベアメタル開発から、RTOS利用ソフト開発へシフトしつつあり、このMCUXpresso IDEもこの流れに沿った機能が追加されました。
MCUXpresso SDK
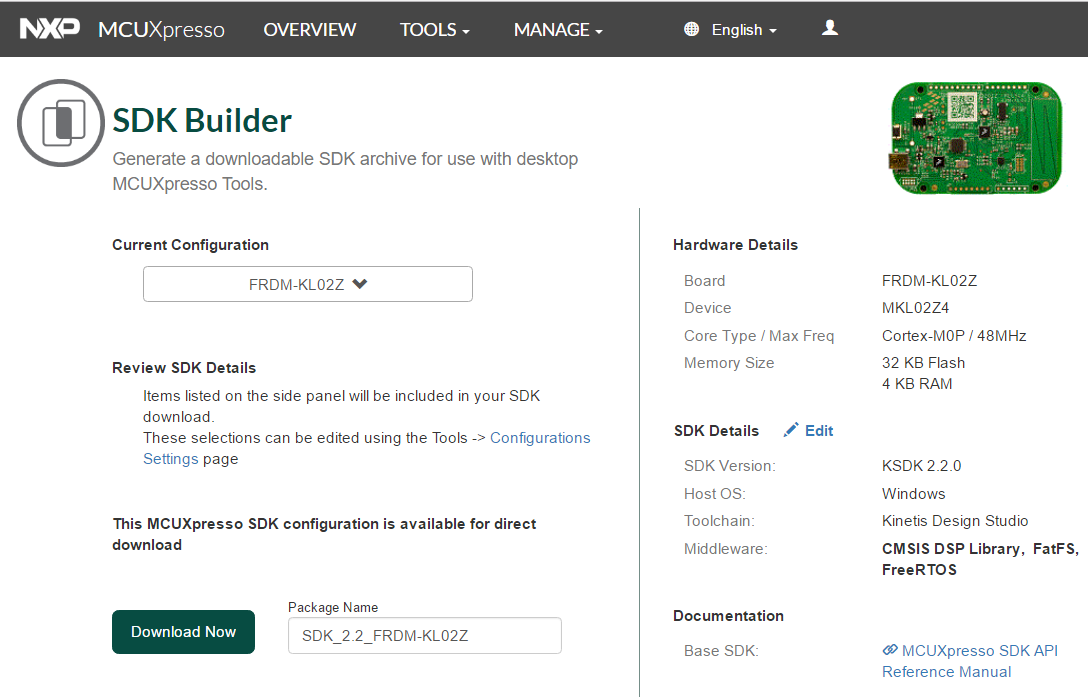
SDK BuilderでBoard、Processor、Kitsなどの対象MCUパラメタを入力し、対応するSDKパッケージをクラウドで作成後、ローカルPCへダウンロードして使います。パッケージの中身は、APIとこのAPIの活用サンプル集です。但し、2017年4月現在は、FreescaleのMCUと2017年に発売されたNXPのLPC54000対応のものしか提供されていません。
その理由は、旧Kinetis Design Studio:KDSのProcessor Expert:PEの代替だからと推測します。MCUXpressoは、KDSのPE機能がSDKとCFGに分離してクラウドへ実装されました。PEをお気に入りだったユーザは、この点に困惑すると思います。
一方旧LPCXpressoのユーザのSDKはというと、これは従来のLPCXpressoに同胞されていたLPCOpenライブラリなどがそのままMCUXpressoにも実装されています。つまり、MCUXpressoは旧LPCOpenライブラリなどが従来同様使えます。
従って、LPC54000開発とKDSユーザ以外は、MCUXpresso SDKを使うことは、今のところありません。
MCUXpresso CFG
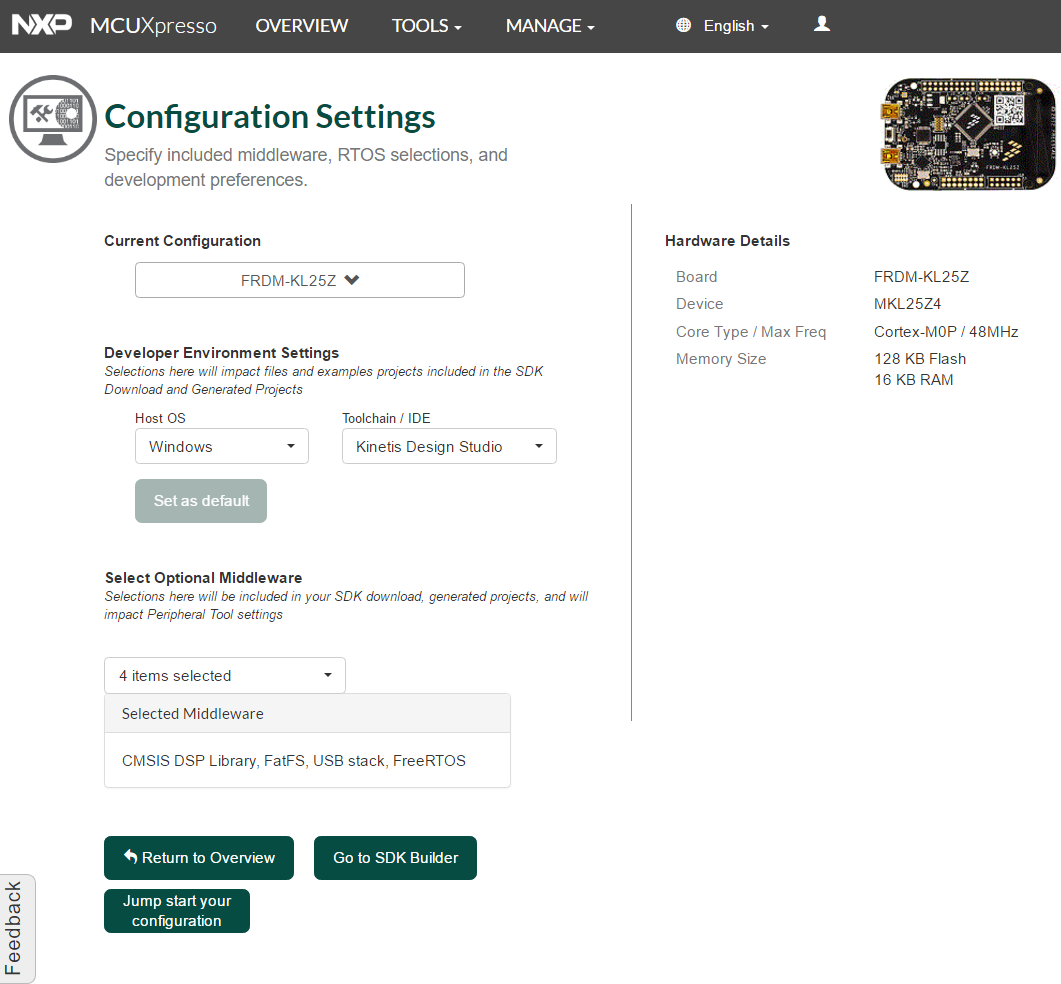
CFGも現状はSDKと同様、FreescaleのSDKとNXPのLPC54000対応のみが提供中です。
MCUXpressoのまとめと当面の開発方法
MCUXpressoは、旧LPCXpressoと旧Kinetis Design Studioを統合した新しいIDEで、現状「フレームワークは出来たものの、完全な移行完了とは言い難い」ものです。以下に特徴を示します。
- IDEとSDK、CFGの3ツールに分離するフレームワークは、CMSIS準拠ソフト開発に適している。
- KDSのPE代替機能をSDKとCFGに割振っている。2017年NXP発売のLPC54000開発にも使えるが、既存NXPのMCUはSDK、CFGともに未対応。
- LPCXpressoとKDSの今後の更新は、期待できない。将来的には、NXP/FreescaleのMCU開発にMCUXpressoを使う必要あり。
- LPCXpressoユーザは、当面SDKとCFGを使わずにMCUXpresso IDEを旧LPCXpressoと殆ど同じ使用法で使える。
- KDSユーザは、MCUXpresso IDEとSDK、CFGを使い開発する方法と、当面はMCUXpressoにPEをプラグインし開発する方法の2通りの開発方法が取りえる。但し、PEの更新が期待できないので、将来はMCUXpresso SDK、CFGを使わざるをえない。
当面の目安としては、LPCXpressoユーザならば、既存MCUのSDK、CFGが提供されるまで、KDSユーザならば、PE更新が必要になるまで、でしょう。
もう1つの目安が以下です。Windows 10 1703更新に相当するIDEベースEclipse 4.6(Neon)の次版4.7(Oxygen)への更新は、2017年6月の予定です。IDEベース更新から約半年でこの4.7ベースの最新IDEが各社からリリースされるとすると、2017年末から2018年初め位にはMCUXpressoへの完全移行完了となる可能性があります。
MCUのIDEは開発スピードを左右する部分だけに、仕様変更や更新が定期的に発生する部分と、各社独自の部分を分離し、トータルでパッケージ化すると、以上で示したフレームワークが重要となります。開発者は、フレームワーク要素更新にも注意を払う必要があるでしょう。