RTOSが複数ユーザタスクの無限ループを回し、タスクの優先順位に応じてMCU実行時間を振り分けること、その利点を第1回で示しました。RTOSは、タスクを処理単位として扱います。今回は、RTOSがユーザタスクをどのように扱うかを解説します。タスク自身は既に出来上がったものと仮定します。
FreeRTOSによるユーザタスクの扱い方
ユーザタスクをFreeRTOSで処理してもらうには、最初にタスク登録が必要です。登録済みの複数タスクは、RTOSにより以下のように4つの状態で管理されます。
FreeRTOSへのタスク登録APIが、vTaskCreate()、登録済みタスクの削除APIがvTaskDelete()です。FreeRTOSは、優先順位の高いタスクをRunningにします。従って、登録後、タスクを即実行するのではなく、他タスクとの優先順位判定をReadyで行い、その結果で実行状態にします(図示の太線部分)。
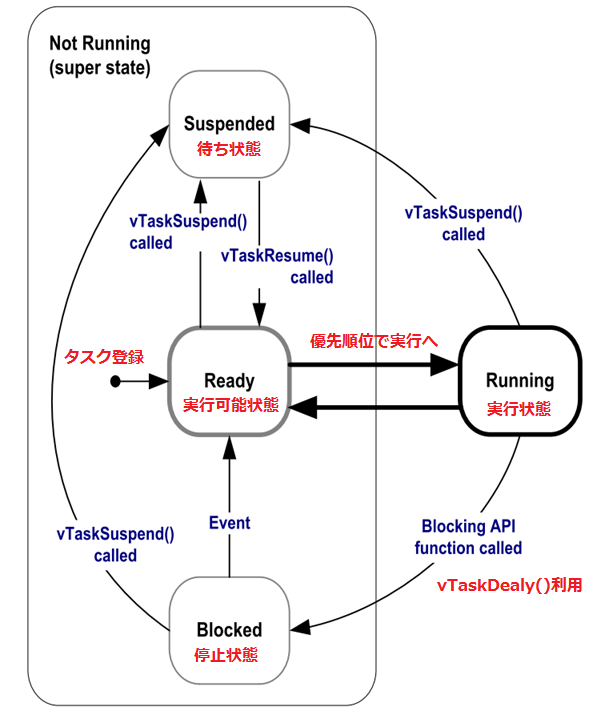
優先順位は、登録APIのvTaskCreate()パラメタで指定できますが、デフォルトは全て同順位です。同順位タスクは、TICK_RATE(タスク切換え時間)単位に実行状態を切り替えるラウンドロビン方式です。実行後は、再びReadyに戻されます。
例えば2タスクのみが登録された場合、LPCXpresso824ボードなら2タスクを1ms毎に交互に切り替えながら実行します。ユーザ側からは、2つのタスクが並列動作したように見えます。これが最も簡単なRTOSマルチタスク処理の説明です。
デフォルト優先順位の変更に使うAPIがvTaskPrioritySet()、vTaskPriorityGet()です。更にReadyやRunningのタスクに対して、図示のAPIでSuspendedやBlockedへも遷移可能です。
これら制御を行うのがスケジューラー、スケジューラーが行う制御をタスク管理と呼びます。スケジューラーをRTOSカーネルと呼ぶこともあります。FreeRTOSスケジューラーは、4個の状態でタスクを管理しますが、数がもっと多いRTOSの例もあります。
※例えば、RL78用のRTOS:RI78V4は、6個の状態遷移を持ちます。
Blockedの役目
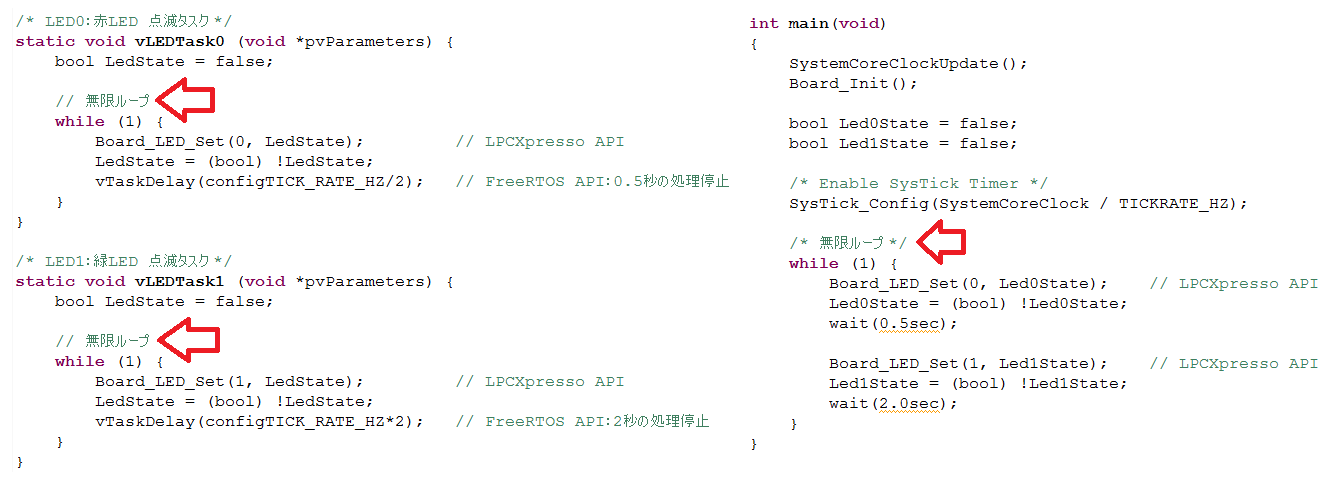
さてここで、第1回で示したLED点滅タスクの無限ループ内にあるvTaskDelay()を解説します。
vTaskDealy()は、タスクをBlockedへ遷移させます。そして設定時間の停止後、Readyへ戻します。つまりBlockedの間は、MCUを使わないため他タスクがRunningになりうるのです。これが、RTOSを使っても、各タスクに通常ソフトと同じように無限ループを記述できる非常に重要な仕組みです。
RTOSを使わない通常ソフト記述の場合、無限ループは、文字通りそのループ内に留まりMCU能力を使い続けます。しかしRTOSは、vTaskDelay()によりソース上は無限ループでも、MCUを使いません。これによりマルチタスク処理ができるのです。
RTOSにより再びRunningに戻ったタスクは、vTaskDealy()の後の処理から実行されます。タスク側からは、指定時間の停止後に継続して実行しているように見えます。
スケジューラーの状態遷移図は、ユーザタスク側からみた状態です。Running以外はMCUを使わないNot Running (super state)ですが、スケジューラー自身のために(ほんの少し!)MCUを使います。このスケジューラーを起動するAPIが、RTOSのmain()最後にあるvTaskStartScheduler()です。
スケジューラー自身は、実は最高プライオリティを持つタスクです。従ってユーザタスクよりも優先的に処理されますが、実態はユーザタスクと変わりません。
まとめ
今回はRTOSのタスク管理を説明しました。スケジューラーの優先順位判定により複数のタスクRunningが切り替わりマルチタスクを実現すること、BlockedによりRTOSでのタスク記述に通常ソフト記述と同様の無限ループを使えることを示しました。
この回までに登場したFreeRTOSのAPIが下記です。FreeRTOS APIレファレンスマニュアルで詳細が解ります。
vTaskCreate()、vTaskDelete()、uxTaskPriorityGet()、 vTaskPrioritySet()、vTaskDelay()、vTaskStartScheduler()、
vTaskSuspend()、 vTaskResume()。
vTaskSuspend()、 vTaskResume()の2つは、次回解説予定。