マイコンテンプレートを利用するコツ/Tipsの第3回目は「時分割処理のタイミングとインタフェースRAM」について示します。
処理起動タイミング マイコンの処理は、電源投入後、「1回のみ実行する」スタート処理と、無限ループで「繰り返し実行する処理」の2つに大別できます(ROM/RAMを初期化するなどのスタートアップ処理は、除いています)。
ここでは無限ループに代わってテンプレートが実行する、繰り返し実行する処理の間隔:「タイミング」を考察します。
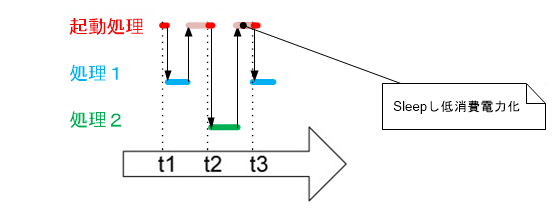
テンプレートは、起動する処理が無い無限ループ:空き時間で起動するのは、Sleepなどの低消費電力処理であることは、第2回 で示しました。
100msと1sの起動間隔は、マイコンにとっては「遅い処理」、例えば、LED点滅や、LCD初期設定、SWチャタリング対策の起動に適しています。
1msと10msの起動間隔は、「早い処理」、例えば、割込みの応答処理などの起動に適しています。
250us起動間隔は、「最も早い処理が必要」な、例えば、UART/I2Cなどのデータ受信処理を起動することを想定しています。
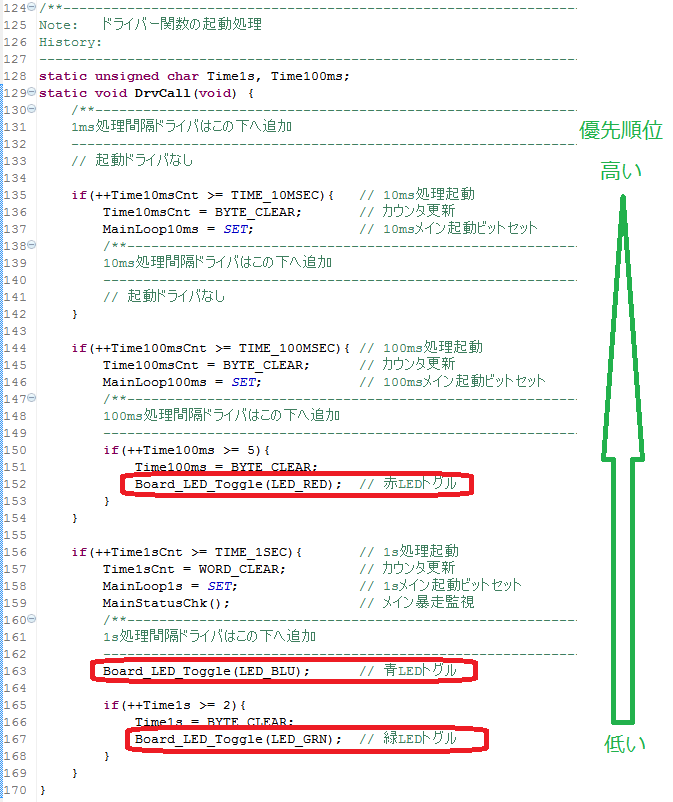
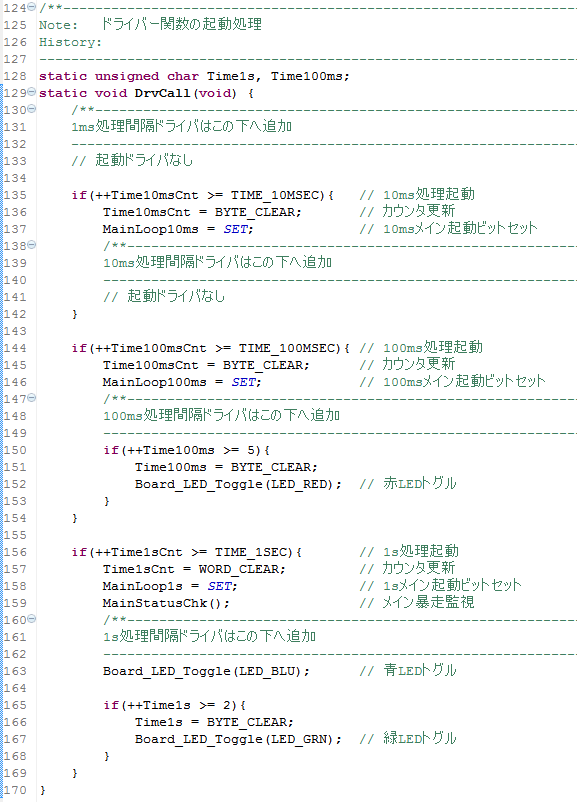
つまり、早いレスポンスが必要な処理ほど処理間隔が短く、起動される処理のソース記述位置も上側になるのです。これがテンプレート時分割起動の「基本的な使い方」です。
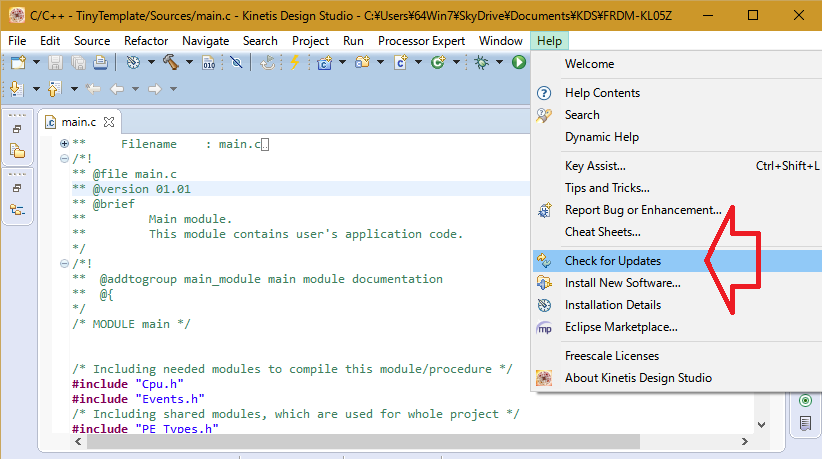
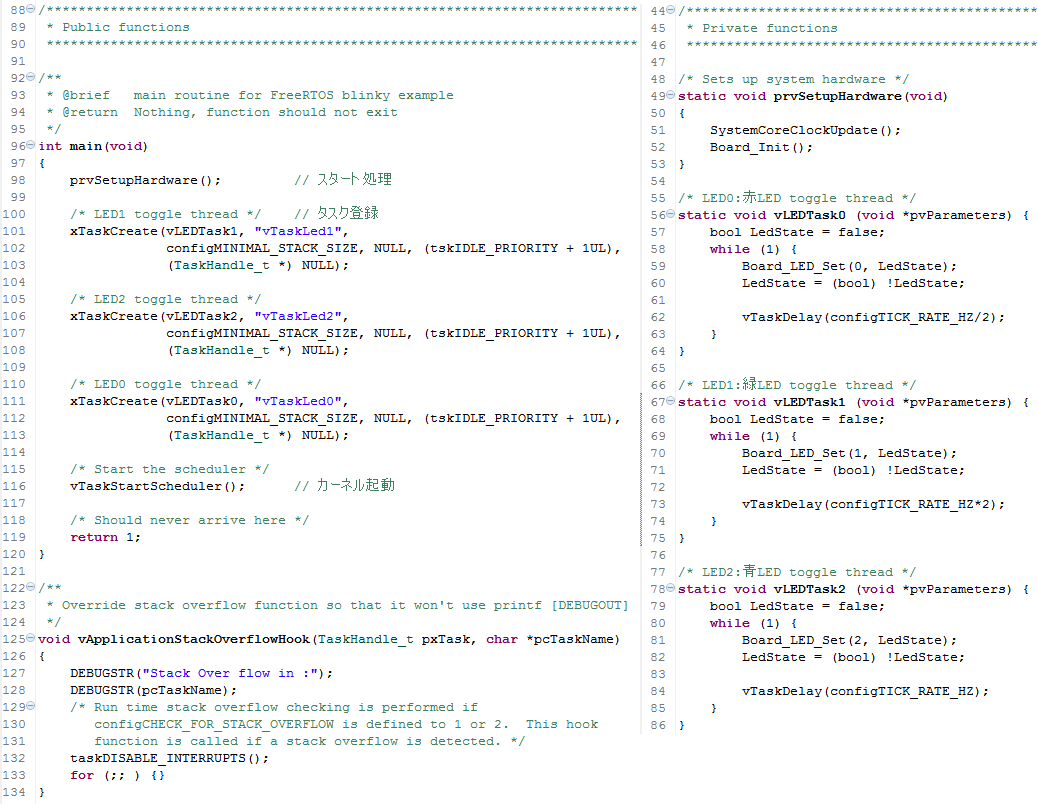
実例が下図です。赤/緑/青LEDを、0.5/1/2秒毎にトグル点滅する場合です。赤囲みが、テンプレートへ追加されたLEDトグル処理を表します。それ以外が、テンプレートに初めから記述済みの起動処理です。
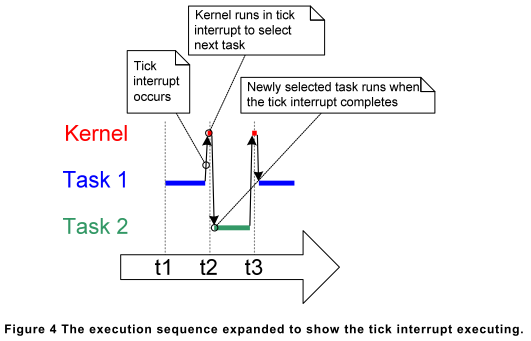
LED点滅処理での優先順位の例 起動間隔 起動の間隔は、第2回で示したtick interruptの発生間隔です。
販売中のテンプレートは、全てこの250usを起動間隔として開発しておりますが、実は「250usである必要性は無い」のです。因みに、FreeRTOSなどの組込OSでもtick interruptは1msです。
250usは、経験的にこの最高速でこれまで利用に問題が無かったからです。
起動間隔の設定は、テンプレート購入者様が「独自判断で設定して頂いても構いません」。
但し、250usよりも高速:短くすることは無いと思います。これよりも短いと、処理分割をより細かくする必要があり、開発がより厳しくなるからです。逆に、250usよりも長くすると、処理分割は楽になります。
テンプレートは、マイコン「コア動作速度を最高速」に設定し、起動間隔も「最高速と思われる250us」でデフォルトは設定しております。これは、「最初」にマイコンの最大能力で動作するアプリケーション開発後、「次の段階」としてコア周波数を下げるなどで、低消費電力化するアプローチを想定しているからです。
インタフェースRAM 処理間のデータやり取りにインタフェースRAMを使うことは、第1回 で示しました。ルネサスのRL78/G1xは、通常RAMよりも高速アクセス可能なSADDRを持つなど特殊な例もありますが、低価格マイコンではRAMが貴重なリソースであることに変わりはありません。
この貴重なRAMを使う時に、ビット単位構造体を使い、ビット単位フラグでデータをやり取りすると、1バイトRAMで最大8個のフラグを使えるので効率的です。
テンプレートでは、このビット単位アクセスを容易にするため、userdefine.hにユーザ型定義を追記しております。処理間にブラグを多用する場合などにご活用ください。
マイコンテンプレートとは? 第1~3回で示したテンプレートは、「ISRは、サンプルプログラムを一部またはそのまま流用し、その他全処理をポーリング起動するマルチタスク処理の骨組み」と説明すると理解が早いかもしれません。
割込み処理は、ISRで割込みフラグ処理のみを行い、ISR発生をポーリングし割込み実処理を起動する。
ポイントのまとめ
処理起動間隔は、250usとしているが、変更は可能、かつ任意 高速な応答が必要な処理は、短い起動間隔へ配置 インタフェースRAMの効率的な利用に、ビット単位構造体も有効
* * *
3回に分けてマイコンテンプレート利用のコツ/Tipsを示しました。これらは、ソフトウエア開発では当然の事柄とダブる部分も多くありますが、数値では表せないのであえてコツ/Tipsとして記載しました。
組込OSを使うよりも簡単で、サンプル流用も可能なマルチタスク実現テンプレートが、お判り頂けたと思います。
販売中のマイコンテンプレート を活用し、アプリケーションの早期開発を成功させてください。