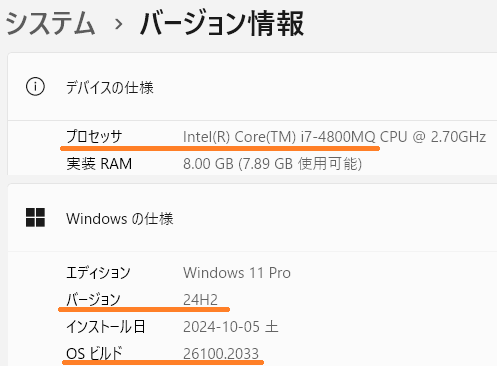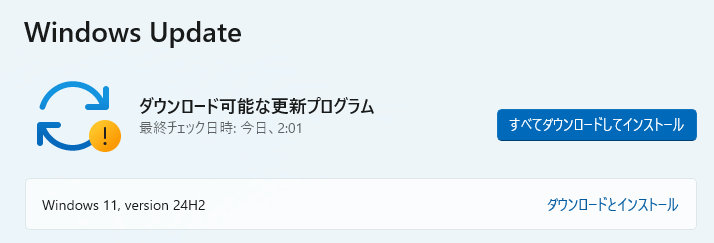
今年10月1日にWindows 11 24H2段階的配布が始まって2か月、セーフガードが解除されたためか、ようやく弊社PCにも今週Win11 24H2が降ってきました。
しかしながら弊社は、来年3月末までは弊社4PC全てをWin11 23H2で運用することにしました。本稿は、その理由と今後の24H2アップグレード策を示します。
先行手動アップグレードWin11 24H2で試運用
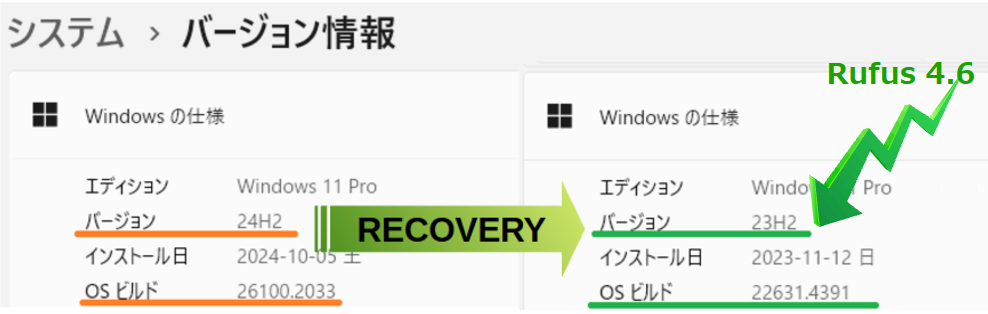
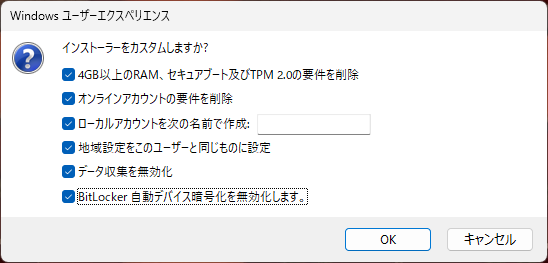
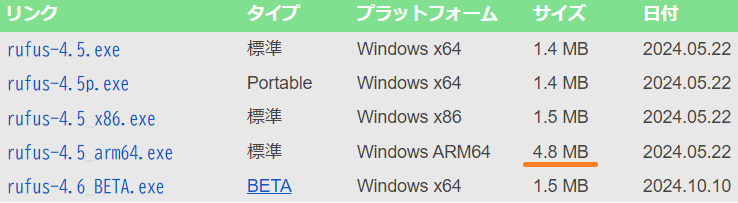
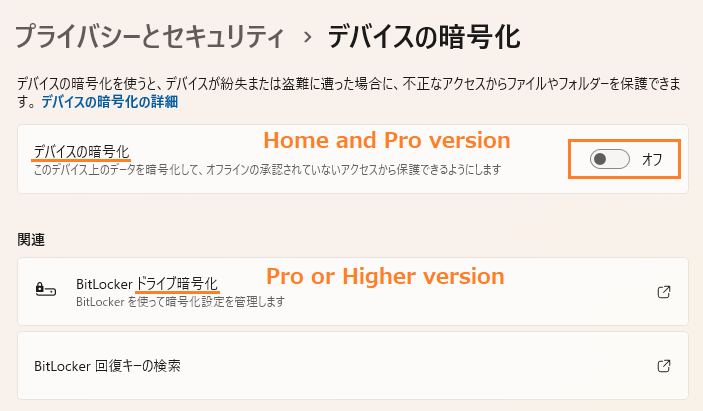
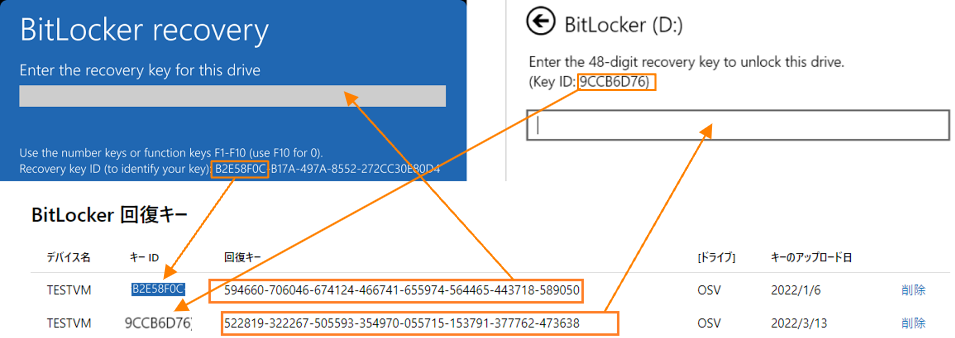
Rufus 4.6を使って1台のWin11 23H2 PCを、Win11 24H2へ先行手動アップグレードし、主要アプリ互換性やBitLockerによるデバイス暗号化注意点が判りました。但し、これらは、Win11 24H2単独運用の結果です。
先行アップグレードしたPCは、主として定期データバックアップ用です。弊社は、このバックアップアプリにFreeFileSyncを使っています。4PCは、プライベートLAN接続です。
Win11 24H2アップグレード後、Win11 23H2同士では何の問題も無かった他PCへのLAN接続ができず、定期データバックアップが出来なくなりました。
つまり、Win11 24H2単独運用では問題が無いものの、複数PCのLAN接続に関しては、トラブル発生です。筆者はWindowsネットワークトラブルが、解決しにくいことを経験上知っています。
Win11 24H2先行アップグレート後、2回の月例修正パッチも適用しましたが、LANトラブルは未解決です。
Win11 24H2ネットワークトラブル
12月に入って“Windows 11 24H2 ネットワーク トラブル”でネット検索したところ、1000万件以上がヒットしました。12月の1週間以内に限っても5000件以上のヒットがあり、Win11 24H2 LANトラブルは多発のようです。
検索対策によると、Win11 24H2自身のセキュリティ強化が原因のようです。
Windowsネットワークトラブルはケースバイケース、前述のように解決困難で数件の掲載策を実施しましたが未解決です。
Win11 24H2修正パッチで新バグ発生
コチラの記事によると、Win11 24H2修正パッチ自体が、新たなバグを生むようです。
この原因は、Win11 24H2コアが、旧Win11/10のNickelコアから、新しいGermaniumコアへ変わったからだと思います。過去のWindowsも同様にOSコア変更時は、トラブル連発でした。
さらに、Win11 24H2は、次期Windows 12(AI PC)への移行やWin10までの古いPCハードウェアの買換えを促進する役目も担っています。
既に多くのエッジAI PC機能がWin11 24H2に実装中です。しかし、エッジAIを実用に使うには、高性能NPUやGPU/CPU、高速メモリが必要で新しいCopilot+ PC購入が必要になると思います。
また、TPM 2.0に代わる新たなセキュリティデバイス:Microsoft Plutonプロセッサが、安全なネットワーク接続に必須になるかもしれません。検索結果のように、TPM 2.0実装PC間でもWin11 24H2 LANトラブルが多発しているからです。
Summary:Windows 11 24H2アップグレード延期理由と対策
先行手動アップグレードWin11 24H2を10月から12月の2か月試運用の結果、以下が判りました。
- Win11 24H2単独運用はアプリ互換性OK、BitLockerに注意すれば問題なし。
- Win11 24H2と旧Win11 23H2のLAN接続でトラブル継続中。
- 23H2比、Win11 24H2自身のセキュリティ強化がネットワークトラブル原因か。
- Win11 24H2修正パッチで新たなバグ発生あり。
これらWin11 24H2トラブル多発の背景は、従来Win11/Win10からのOSコア変更、次期Win12(AI PC)への新機能追加にあると推測します。
安全策として、弊社4PCのWin11 24H2アップグレードを2025年3月末まで延期し、それまでは全PCをWin11 23H2運用とします。
※Win11 24H2多発トラブルが、2025年3月末までに収束を期待。
Win11 23H2サービス終了2025年10月半年前の4月に、Win11 24H2トラブル状況を再確認し、Rufus 4.6によるWin11 24H2アップグレードを対策とします。
Afterword:OCuLinkによる外付けGPU追加
OCuLink(データ転送速度最大64Gbps、PCI Express 4.0対応)というThunderboltやUSB 3よりも高速なインタフェースを使うと外付けGPU追加ができます。ミニPC採用中の新しいインタフェースで、エッジAI能力追加が可能です。
エッジAIとクラウドAI両処理でAIアシスタントを実務に使うには、それなりのハードウェアやインタフェース/回線速度が必要でしょう。高画質でYouTubeを見るには、高性能GPU/モニタと高速ネットワークの全てが必須なのと同じです。どれが欠けてもボトルネックが生じ、期待の高画質再生はできません!
様々なAIサービスがWin11 24H2へ追加中です。しかし、次期AI PC(Win12)はこれらが統合され、より使い易いAIアシスタントになると思います。例えば、前投稿最後のイラスト「プレタポルテのMPU開発とオーダーメイドのMCU開発」は、Edge Copilotを使って筆者自ら作成しました。
しかし、投稿文作成中に、Copilotが自発的にこのイラストを使ってはどうですか?などアシスタントアドバイスがあれば、もっと簡単で効率的に記事が作成できます。エッジAI能力は、いくらあっても無駄にはならないと思います。
Afterword2:Win11 24H2アップグレート延期方法
Win11 23H2からWin11 24H2自動アップグレートを4ヶ月間止める方法は、いろいろあります。弊社は、コチラのWindows 11対策オプション2、グループボリシーから無効化する方法を用いました。