Intelは、デバッグ機能付きのEclipseベースIDE、Intel® System Studio for MicrocontrollersのQuark™ SE版をアナウンスしていますが、未だにリリースされていません。私は2016年版Eclipse:Neonをベースに使うと思いますので、今少し時間がかかるかもしれません。
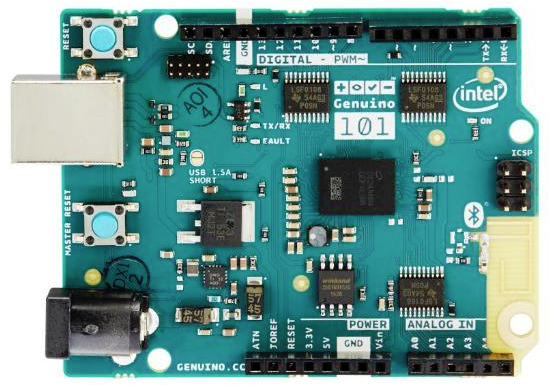
Bluetooth LEに6軸加速度センサも内蔵した32MHz動作インテルCurie、ROM/RAM=192KB/24KBのMCUが実装されたArduino開発ボード、これがArduino/Genuino 101です。
Quark SEコアにSoC: System on a ChipしMCU単体ROM/RAMは、384KB/80KBですが、開発環境Arduino IDEが使う残りがユーザプログラマブル領域で192KB/24KBとなります。実にROM50%、RAM70%をIDEが使う!というものですが、その理由は後で考察します。
データシートやFAQによると、2016年3月にIntel® IQ Softwareというパッケージでサンプルアプリケーションや専用RTOSなども提供するそうですが、現時点でリリースされていません。
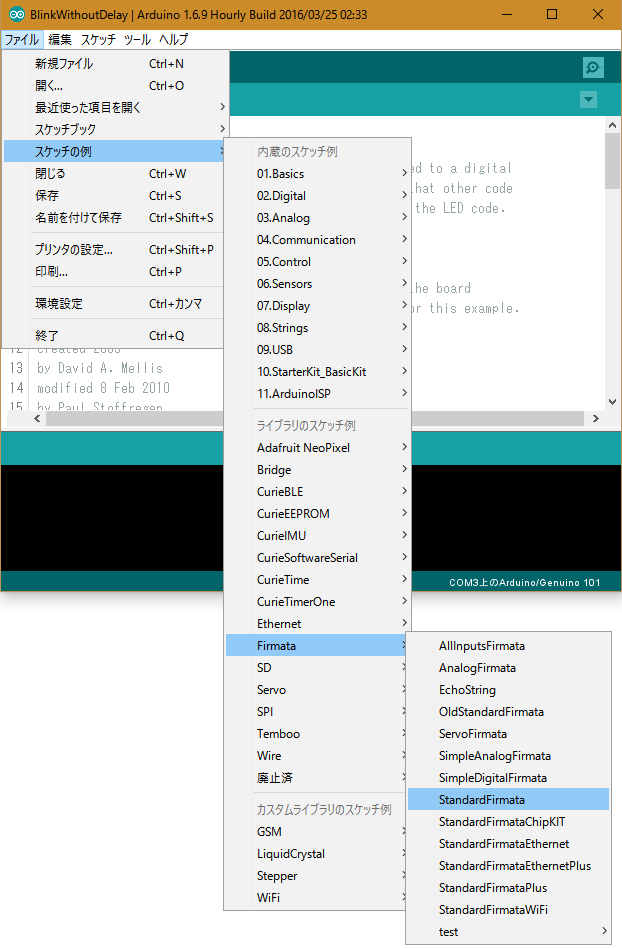
Arduino IDE
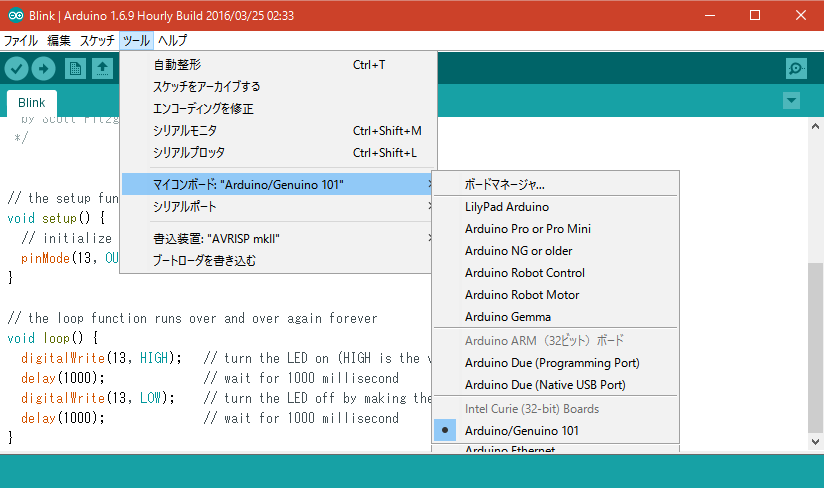
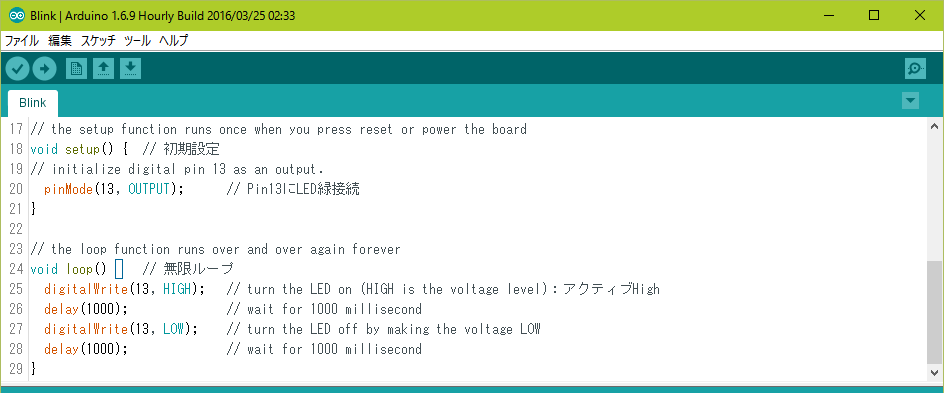
Intel IQ Softwareリリースまでは、無償のArduino IDEを使います。最新版1.6.9をダウンロードしインストール、さらにArduino/Genuino 101動作のためIntel Curie Boards by IntelをボードマネジャでインストするとArduino IDEが使えます。
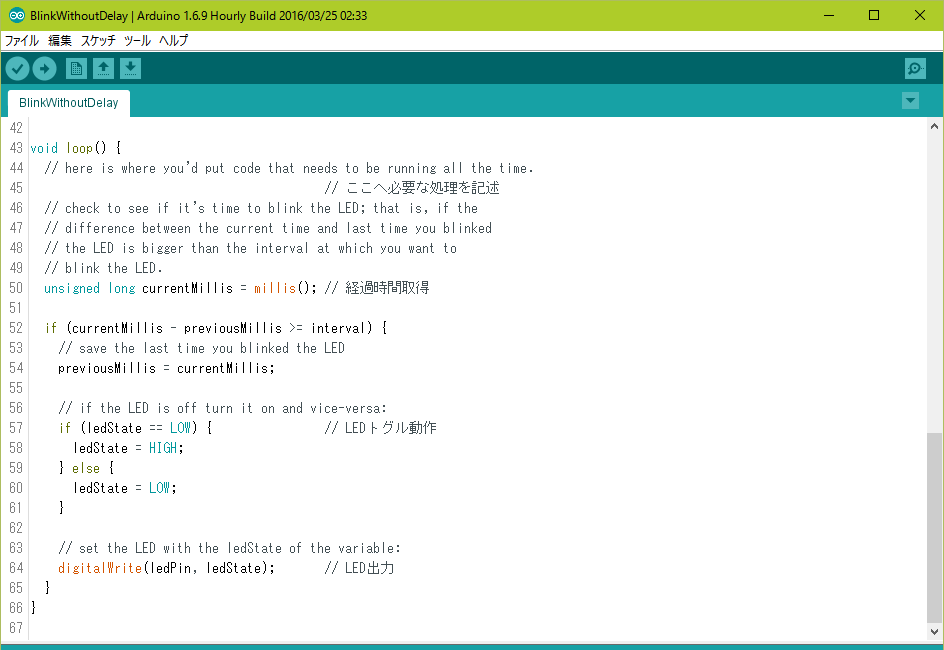
起動したユーザ処理終了後や、起動処理が無い時は、自動的に省電力動作となります。組込みRTOS:Real Time Operating Systemにも同様な機能がありますが、RTOSほど複雑でなく、サイズ自体も小さいのが特徴です。詳しくは、マイコンテンプレートのサイトのテンプレート利用Tipsなどを参照してください。
先に示したIntel IQ Softwareがリリースされれば、RTOSも含まれていますので、そちらの方が良いと思う開発者の方も多いと思います。しかし、RTOSを使いこなすのは簡単ではありません(RTOS関連記事も参照)。
また、Windowsがそうであるように、OS自体の動作が不明で、さらにバグがある可能性も否定できません。
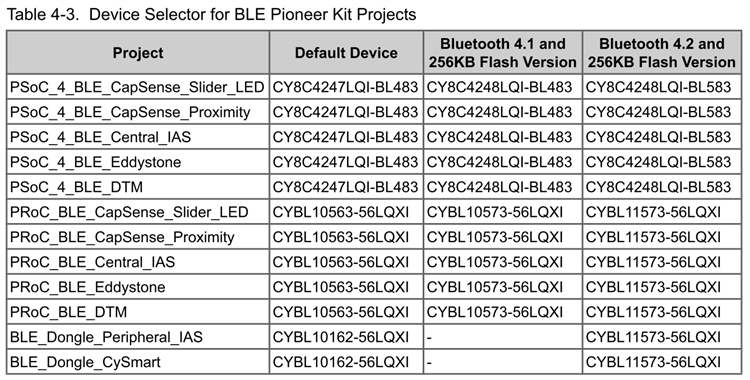
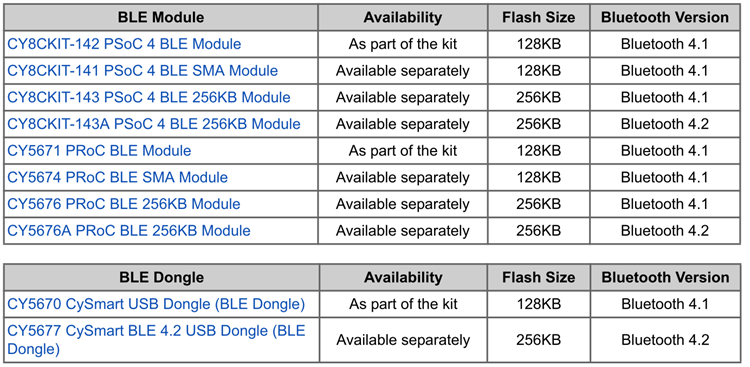
PSoC 4 BLEモジュールでは、
Bluetooth 4.1でROMが128KBから256KBへ増えたCY8C4248LQI-BLE483、
Bluetooth 4.2でROMが256KBのCY8C4248LQI-BL583、
PRoC モジュールでも、同じく
Bluetooth 4.1でROMが128KBから256KBへ増えたCYBLE10573-56LQXI、
Bluetooth 4.2でROMが256KBのCYBL11573-56LQXI、
BLEドングルもBluetooth 4.2対応のCYBL11573-56LQXIのサンプルソフト、Projectが対応します。
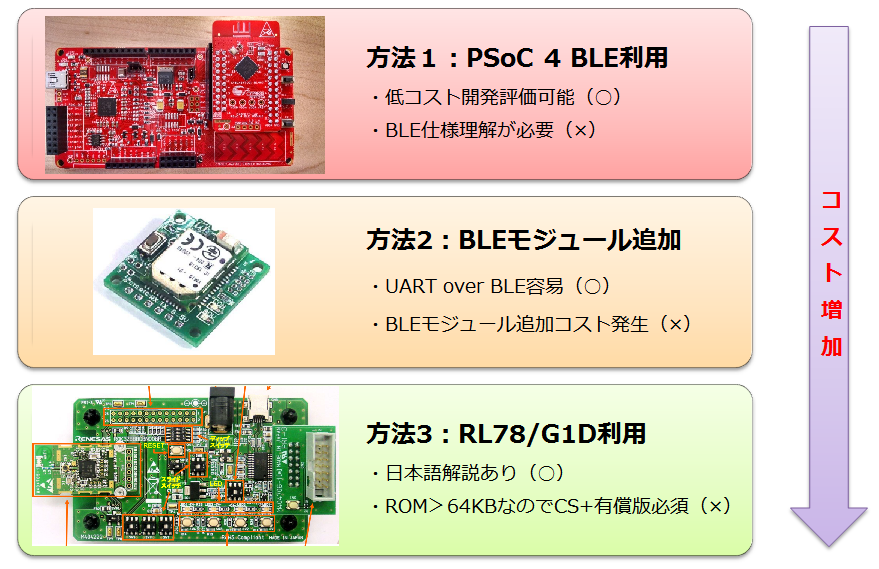
BLEモジュール追加の方法2は、マイコンUART入出力にBLEモジュールを追加する方法です。
マイコン以外にBLEモジュールが必要なため、追加コスト(図示、浅草技研BLESrialの場合4000円)が必要ですが、BLEを無線のドカン(UART over BLE)として使えるので、BLEをブラックボックスとして扱えるのが魅力です。
方法1と方法2のコスト差は、使用マイコンにも依存するので大差ありませんが、後で示す仕様変更時に差が出ます。
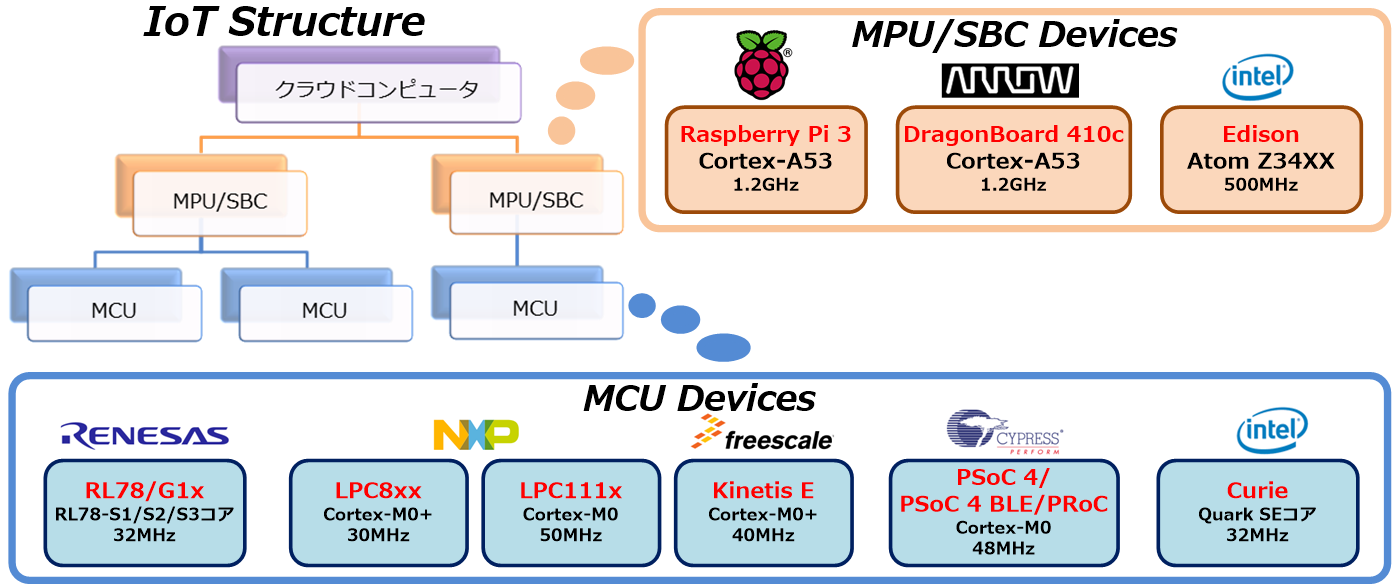
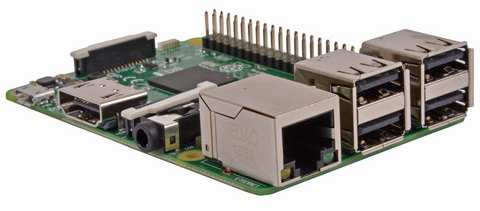
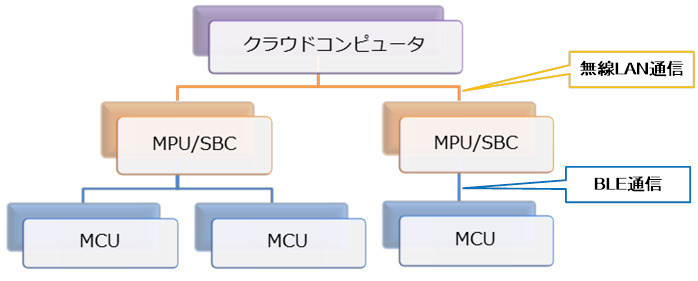
今回Raspberry Pi 3でIEEE 802.11b/g/n、Bluetooth 4.1(BLE: Bluetooth Low Energy)が追加実装されたことは、MCU、MPU/SBC間の通信手段としてこれら方式が有力であることを示しています。また、セキュリティや通信に処理能力が必要なので高性能化も解ります(既にこれら機能実装済みのDragonBoard 410cは、こちらを参照)。