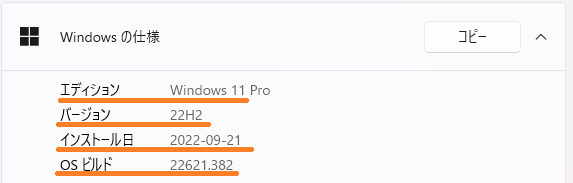
最新Windows 11 22H2大型更新の一般公開は、2ヶ月前の2022年9月21日。弊社3PCを手動にてWin11 22H2へ更新後、2か月経過状況を示します。
Win11 3PC状況

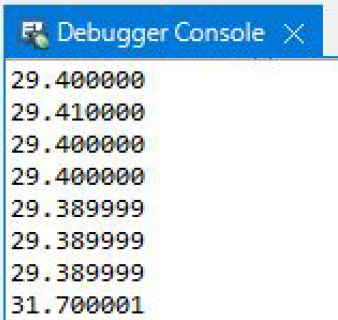
Win11更新後、2ヶ月間に配信された9件のWin11 Updateと、現在のPC状況です。
3PC中、1台はWin11アップグレード要件を満たしていませんが、3PCとも上記状況です。また、3PCともWin11に、今日現在不具合はありません。
他のPCと同様、TPM要件未達PCでも、Win11にアップグレードできUpdateも2ヶ月間の更新の履歴から正常に適用できたことが判りました。
関連投稿:Win11 22H2手動大型更新方法
3種の累積更新プログラム:B、C、定例外(Out of Band)
Windows Updateは3種類あり、この2ヶ月間に提供されたWin11 Updateは、これら3種類全てを含みます。
- Bリリース:毎月第2水曜(日本時間)配布。適用必須。
- Cリリース:Bリリース以外の月例配布。適用任意。
- 定例外(Out of Band)リリース:B/C以外の緊急配布。適用必須。
最初の図のKB5019509が定例外、KB5019980/KB5020622/KB5018427がBリリース、それ以外がCリリースです。弊社は、Cリリースでも配布時に即適用する方針です。
Microsoftは、2023年のBリリース配布スケジュールを公開しています。Bリリース内容が重要だからです。
2023年1月11日、2月15日、3月15日、4月12日、5月10日、6月14日、7月12日、8月9日、9月13日、10月11日、11月15日、12月13日(全て日本時間)。
PCを運用していれば、定期的にPC自身がWindows Updateチェックを行います。従って、これら日程のカレンダー登録までは不要だと思います。
但し、Bリリース重要性、適用必須はお忘れなく!
関連投稿:Windows重要パラメタ
結論:Win11 22H2更新後2ヶ月実績
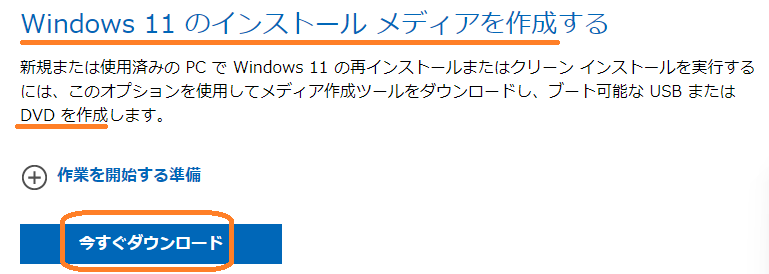
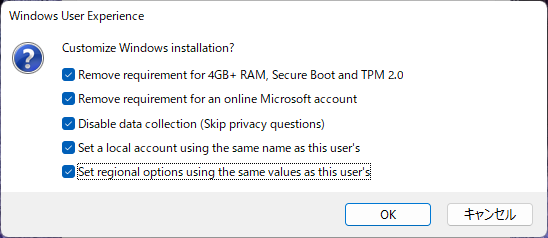
Win11要件を満たすPCと同様、アップグレード要件未達PCであっても、Rufus利用で最新Win11へ手動更新でき、Updateなども問題なく適用できることが、この2ヶ月間で判りました。
OSコアがWin10と同じWin11の操作性は、Win10と大差ありません。Win10アプリケーションも、Win11で動作します。新しいOSに慣れる目的なら、Win10との機能差が少ないWin11は適しています。
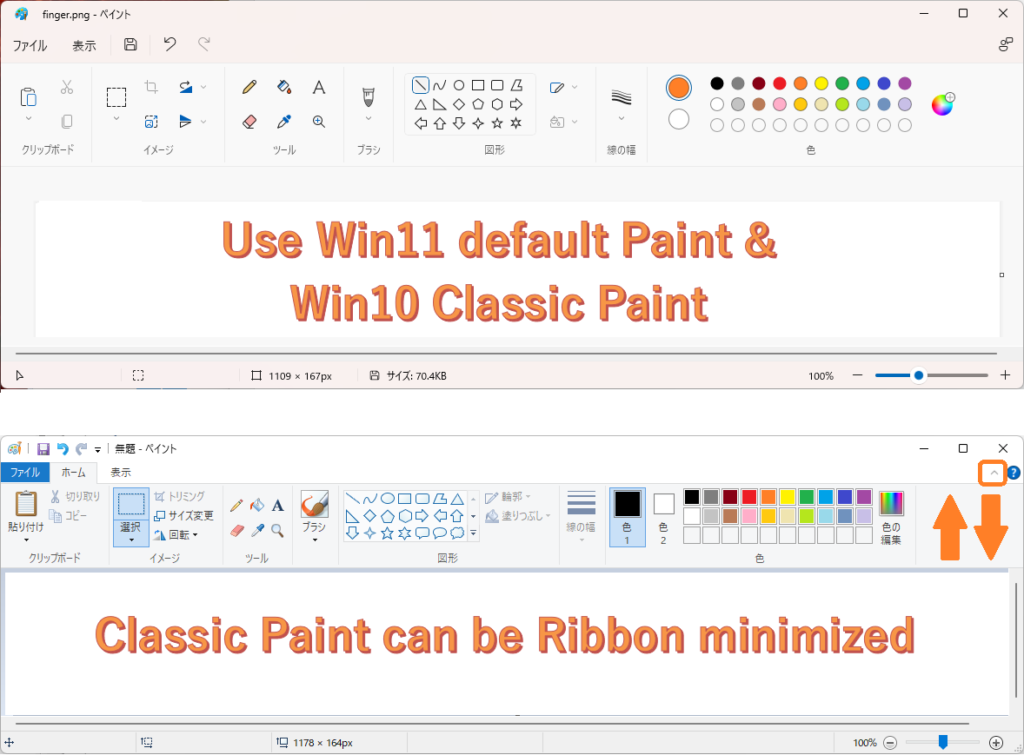
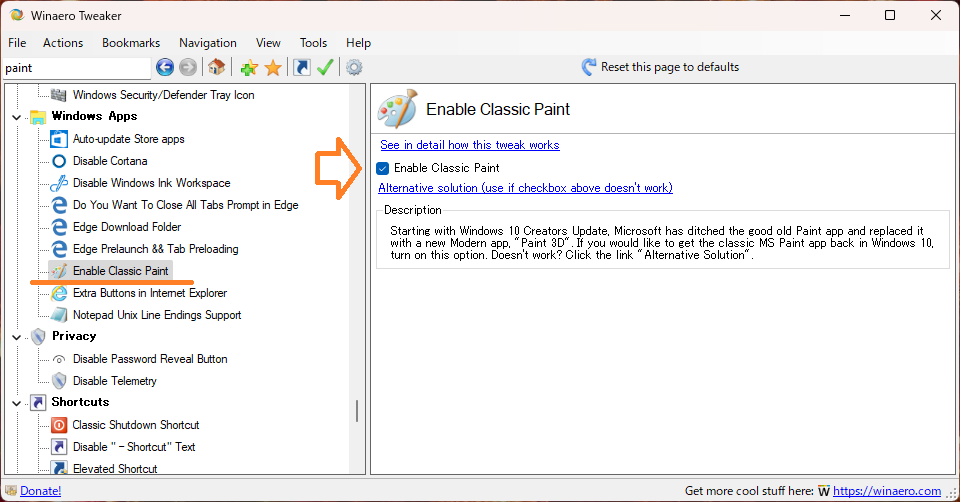
関連投稿:Rufus利用Windows 11要件未達PCアップグレード方法、Windows 11ペイント改善
新PC購入はWindows 12発表後
Win11アップグレード要件、特にセキュティ関連が厳しくWin10のまま使い続けるユーザも多いと思います。
Win10は、2025年10月14日にサポート終了、残り3年です。ちなみにWin10 22H2でも、2024年5月14日までの18ヶ月サポートです。残り3年の間にWin11対応新PC購入が、多くのユーザアクションでしょう。
ただ、Win10比セキュリティ強化のWin11は、関連投稿Rufus利用の無理やりアップグレードでも本稿で示したように十分に使えます。無理やりアップグレードの不安は、累積更新プログラムの適用、万一に備えたバックアップなど、基本的PC運用で小さくできます。
要件を満たすWin11 PC2台と無理やりアップグレードWin11の3PC 2ヶ月間運用実績、Win11無償アップグレード終了の可能性なども考慮すると、Win10継続利用にこだわる必要はないと思います。
新PC購入は、2024年予定のWindows 12発表後が良いかもしれません。Win12では、セキュリティ強化だけでなく、新たなWindows魅力機能が提供され、その魅力に見合う新しいPCハードウェアが必要になると思うからです。
関連投稿:TPM 2.0の古さ、Windows 12
 2022年11月11日、
2022年11月11日、