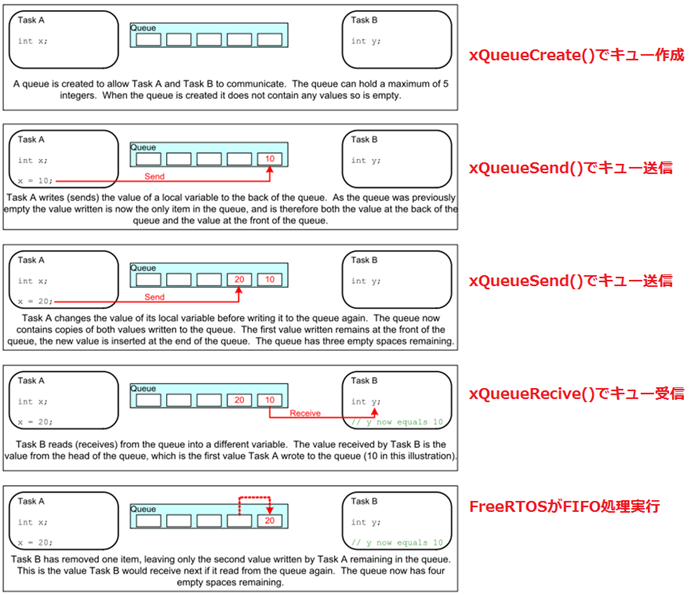
FreeRTOSは、Operating SystemですのでMCU資源のユーザによる直接アクセスを嫌います。メモリなどの直接表現ではなく、論理的にメモリを繋げたQueues:キューという手段で、通信という方法によりタスク間データ送受信を行います。FreeRTOSのタスク間通信Queues:キューは、FIFO:First In First Outとして使います。
使用RTOS:FreeRTOS(NXPのIDE:LPCXpresso無料版に付属)
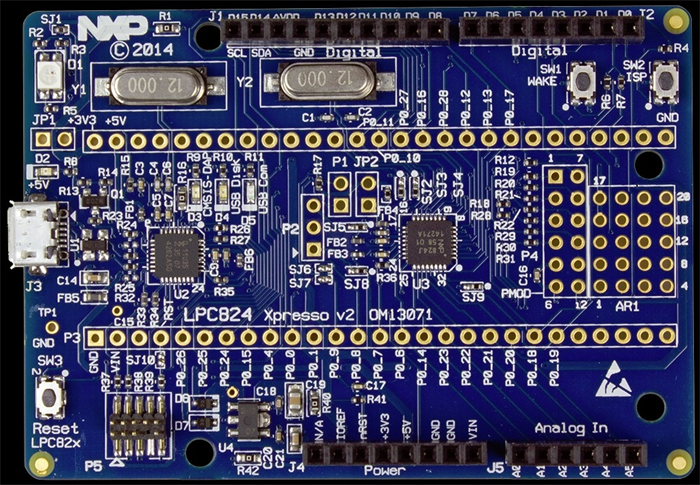
MCU評価ボード:NXP LPCXpresso812またはLPCXpresso812/824-MAXまたはLPCXpresso1114/5
※記事ではFreeRTOS v8.0.1、LPCXpresso v8.2.2、LPCOpen v2.19(いずれも2017年2月最新のLPCXpresso無償版に付属)とLPCxpresso824-MAXを使います。
※FreeRTOS Documentationにある“Mastering the FreeRTOS Real Time Kernel – a Hands On Tutorial Guide”が参考書としてお勧めです。
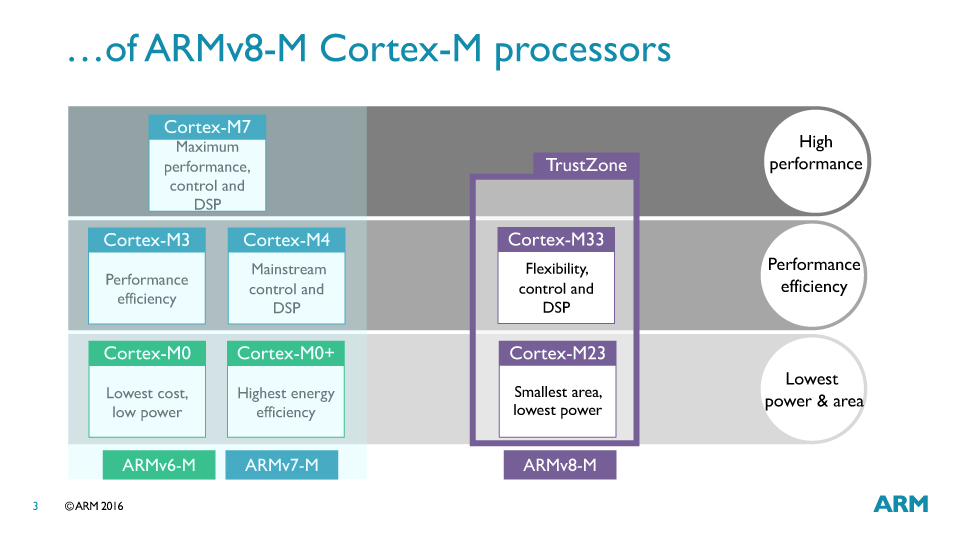
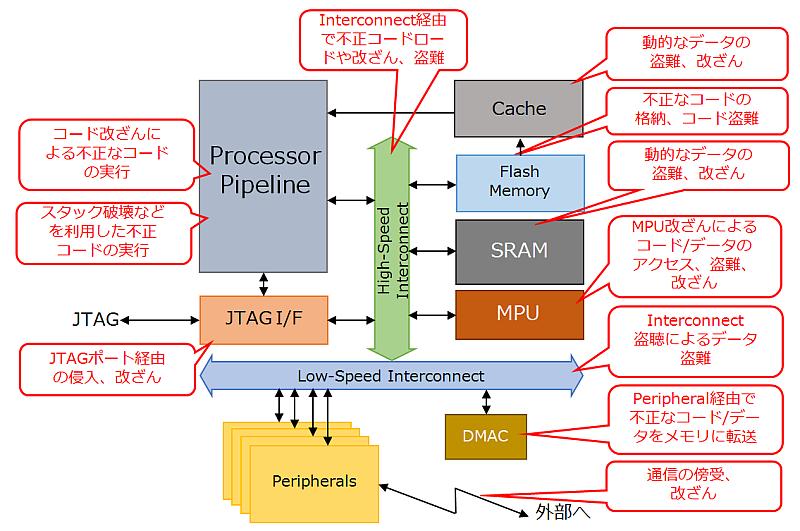
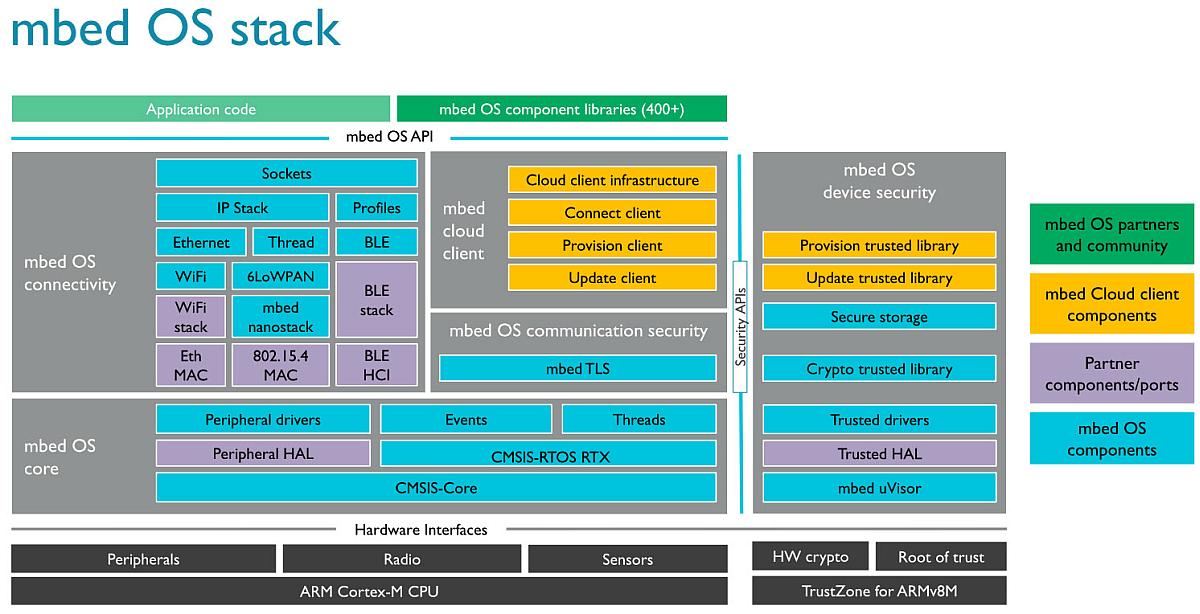
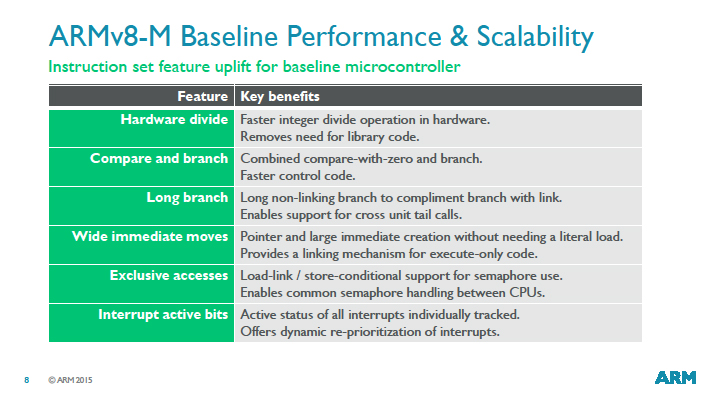
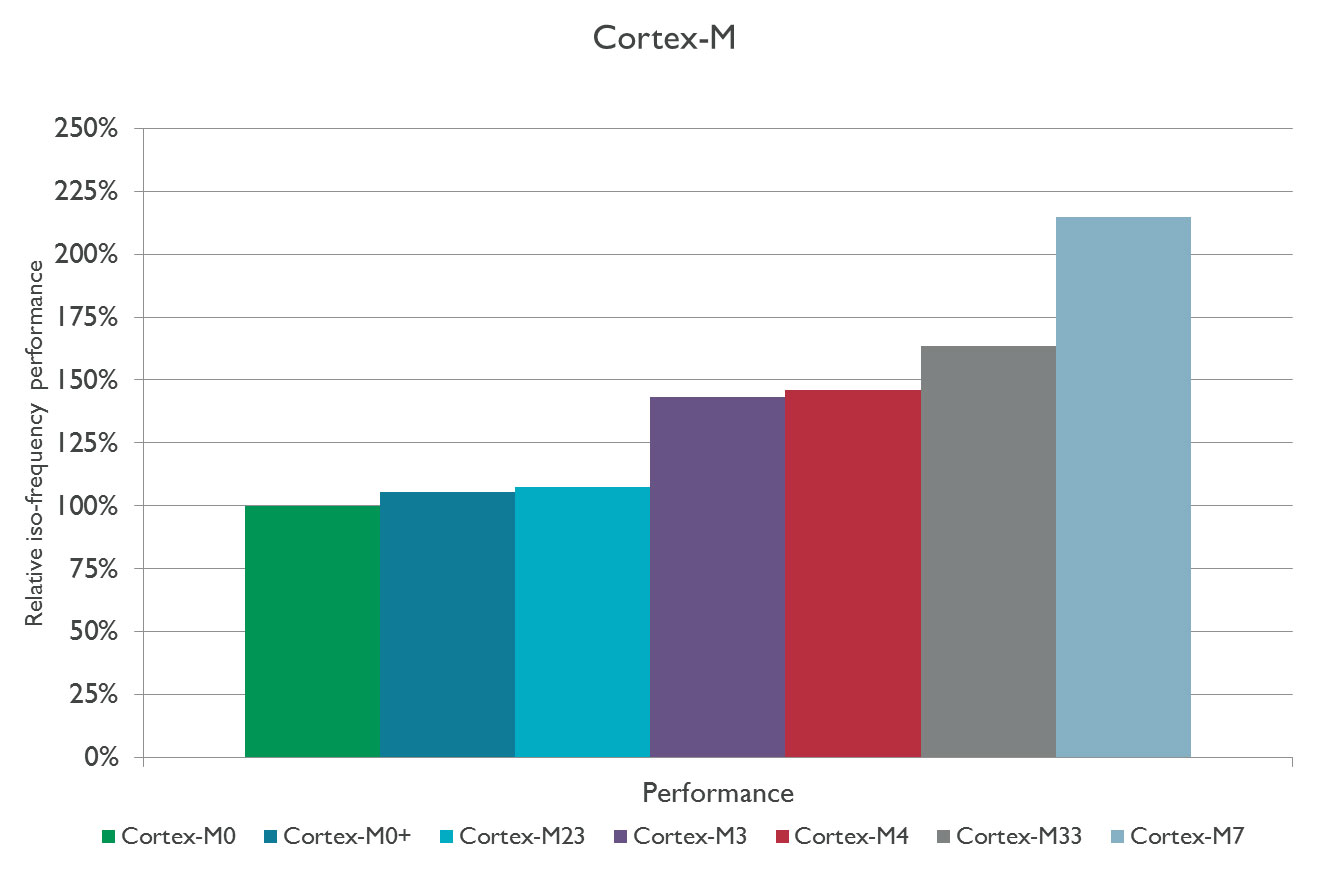
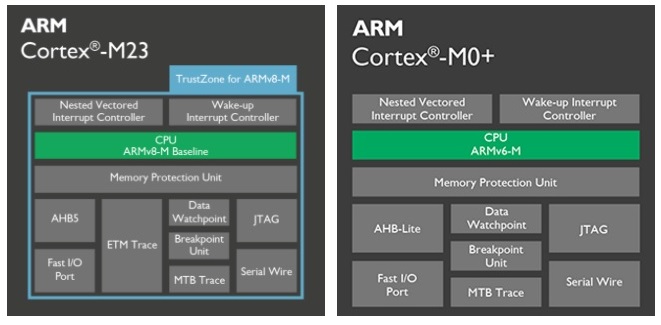
2017年1月13日発行“ARMの最新アーキテクチャ「ARMv8-M」が目指す「セキュアMCU」とは”の記事を読むと、ARMコアの新ラインアップCortex-M23の中身:ARMv8-Mが備えるセキュリティの概要が分かります。IoT向けマイコン:MCU実現には、Cortex-M23にARM RTOSのmbed OS 5実装が必須になりそうです。
重要なのは、これらの防御にもかかわらず外部との通信セキィリティ、具体的には通信データの暗号化処理は、別途IP:Cryptocell-312か、または、mbed OS 5(TLS部分)が必要になる点です。低価格IoT向けMCUでは、IP追加よりもmbed OS 5実装の方が現実的ですので、結局、下記公式が成り立ちそうです。