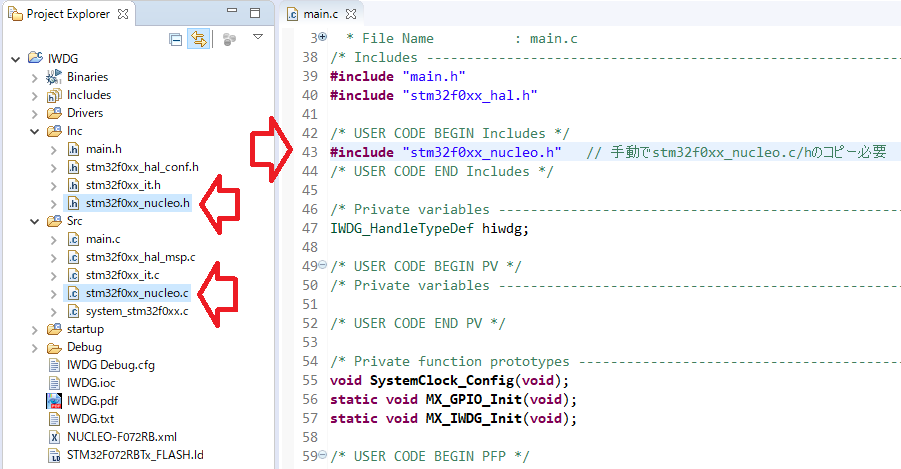
STM32CubeMXは、STM32Fxマイコンのコード生成ツールとして良く出来ています。但し、現状1つ残念なことがあります。HAL:Hardware Abstraction Layerに加え、BSP:Board Support Packagesをドライバとして出力しないことです。そこで、現状のHALドライバのみ出力に対策を加えます。
STM32CubeMX
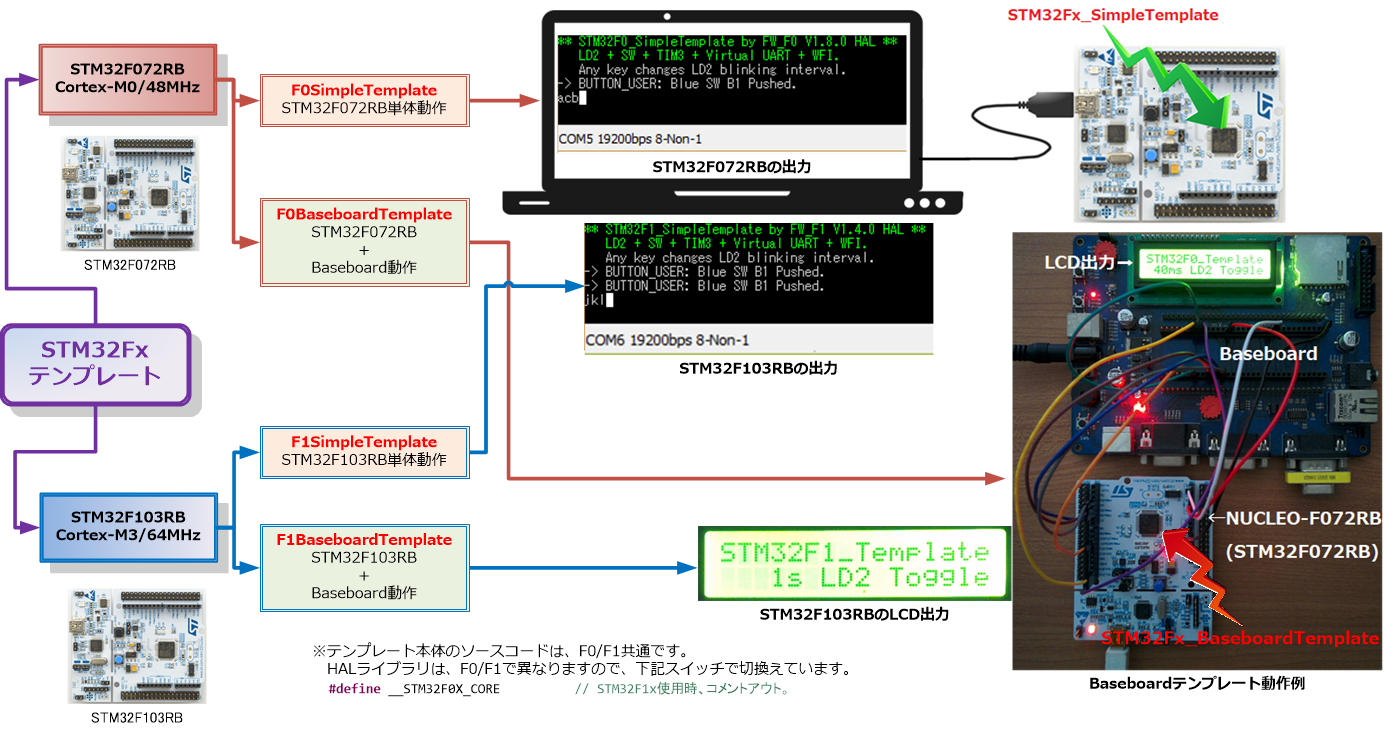
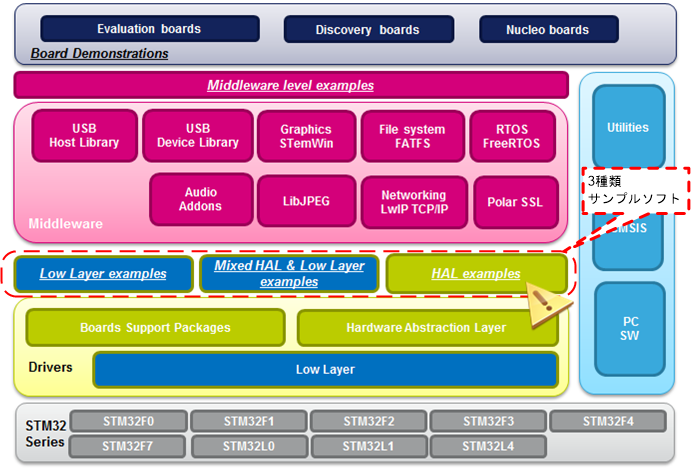
STM32Fxファームウエア構成
STM32Fx Software Structure
STM32Fxファームウエア構成が上図緑線の個所です。STM32Fxマイコンサンプルソフトは、使用するファームウエアライブラリに応じて、Low Layer examples、Mixed HAL & Low Layer examples、HAL examplesの3種類あります。
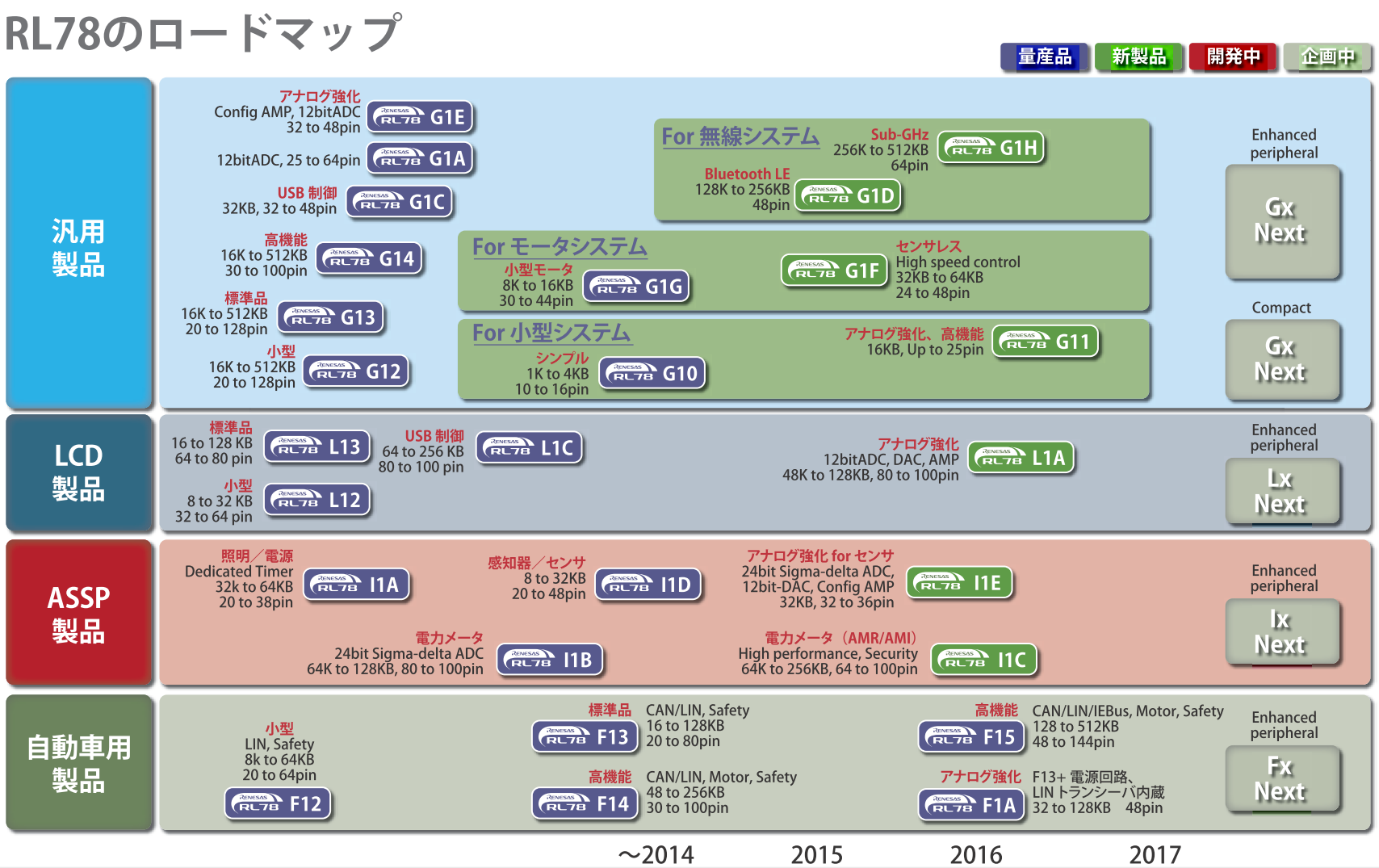
さらに、このアナログ強化とセンサの詳細内容をカタログ記載の各MCUから読むと、S1/S2/S3コアへ、周辺回路PGA:Programmable Gain Amplifierとコンパレータ、ADC/DACを強化した製品であることが判ります。汎用製品でも、よりIoT向けのMCUへ変化しつつあることが、同ページのRL78応用分野からも解ります。
ARM Cortex-M系に勝るRL78の高品質サンプルソフト
ARM Cortex-M系が全盛な低価格MCUの市場で、唯一独自16ビットS1/S2/S3コアでライバルと争っているRL78。この市場で生き残るには、価格や開発環境の良さに加えて、実際の開発がラク、手軽になることです。