Microsoft CopilotとGoogle Geminiの使い方と特徴を簡単にまとめます。最新Gemini 1.5 Proは、GPT-4oを上回る性能と聞いたからです。生成AI性能評価は、専門家に任せ、我々利用者は、両者の特徴や使い方を知っていれば十分です。
生成AI(GeminiやCopilot)ができること、注意点
会話型AIサービスGoogle Geminiは、Microsoft Copilotのライバルです。専門家によると、2024年5月公開の最新Gemini 1.5 Proは、GPT-4oより高性能だそうです。生成AI関連の開発スピードは凄まじいです。
激変AIサービスの利用側は、生成AI利用時の最低限の知識、無償版GeminiとCopilotの使い方や特徴を知っていれば、十分使えます。業務にAIを活用することは、当たり前になりつつあります。先ずは、手軽に無償版生成AIを使い、その特徴や癖を掴んでいけば良いと思います。
生成AI利用時、最低限の注意点、会話型生成AIサービスができることが以下です。
生成AI注意点:ハルシネーション(幻覚)。AIが事実と異なる情報を生成し、まるでAIが幻覚を見ているかのように、もっともらしい回答を生成する現象。AIは、大量のテキストから単語関連性やパターンを学習し、つながる確率の高い単語を使って回答を生成するのが原因。対策は、ユーザ自身による回答出典先確認。
会話型生成AIサービスができること:テキストやPDF、ブラウザ表示中のページ要約が得意。これ以外に、ネット検索や翻訳、AIスマホが得意な画像認識や生成なども可能。有償版は、無償版の制限緩和や高度なプログラミング開発支援もできる。
※生成AI牽引企業GOMA(Google、OpenAI、Microsoft、Anthropic)は、コチラの投稿参照。
Geminiの使い方、特徴

Geminiは、GeminiページへGoogleでログインすると、新しくGemini専用ページが開き、ページ下のプロンプト欄へ質問や相談を入力すると、ページ上にGeminiのAI回答が示されます。
Gemini回答は、最新ネット情報に基づいています。ここが、ChatGPTベースのCopilotと異なる点です。ChatGPTは、GPT-3.5なら2021年9月までの学習済みデータからCopilot回答を生成します。
弊社7月19日ブログのGemini要約例を示します。
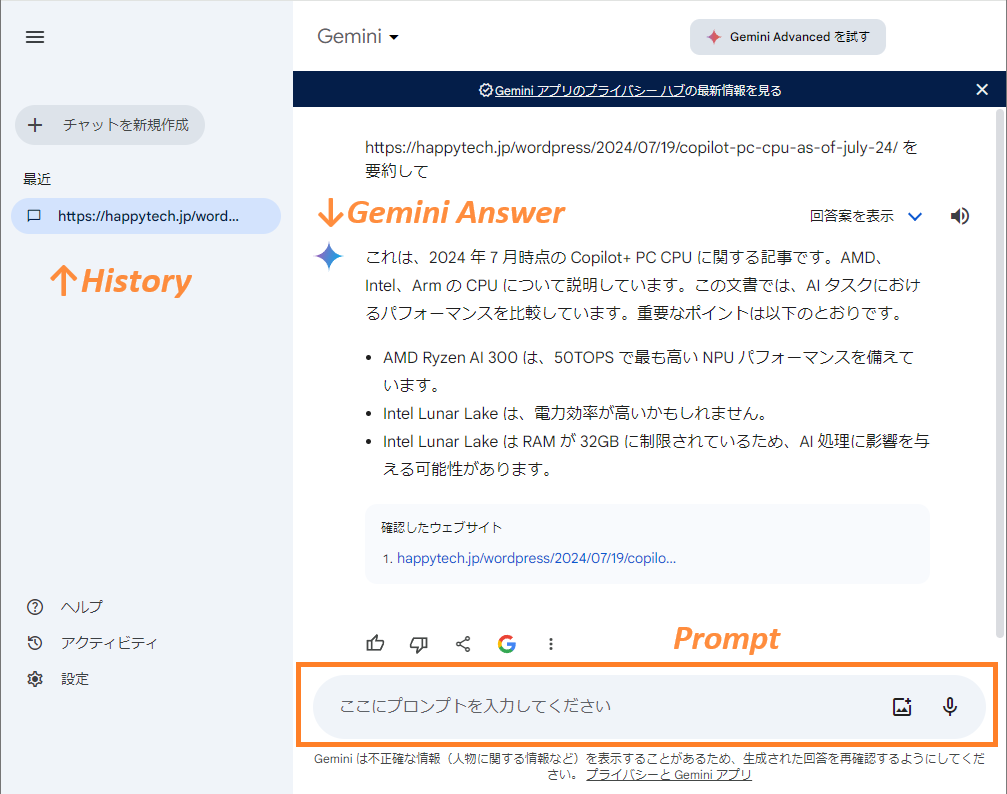
また、Geminiへ一般的な質問や相談をした場合は、「回答を再確認」ボタンが現れ、これを押すと、Gemini回答の基になったリンクが示されますので、ハルシネーション対策ができます。
Googleログインを使うGeminiは、スマホでよく使うGoogle MapやGoogle Photoなどと連携性が良い会話型生成AIサービスです。
Copilotの使い方、特徴
Copilotの使い方は、コチラの投稿、Afterwordに示しています。
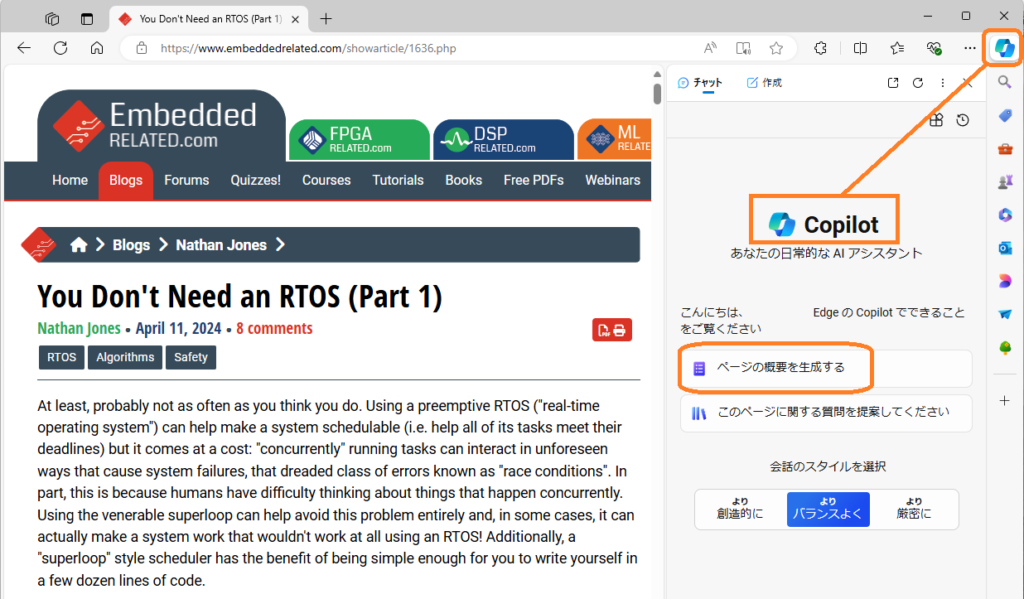
Microsoftへログインすると、Edgeページ右上にCopilotボタンが表示されます。このボタンを押すと、ページ左側からCopilotエリアが現れます。このエリア内に、ページ概要生成やページ関連質問、会話スタイル選択など良く使うボタンが初めから用意されていますので初心者でも使い易いと思います。
有償版では、WordなどのOfficeアプリとCopilotを連携し、下書き作成や企画書テンプレート自動作成なども可能です。Geminiよりも、Windows PCとの連携を強化しています。
Summary:GeminiとCopilot使い方と特徴
AIスマホとの連携性が良いGeminiは、最新Googleネット情報を基にAI回答を生成します。また、回答再確認ボタンで、AI回答の基リンクが示されるなどハルシネーション対策ができます。
Windowsアプリとの連携性が良いCopilotは、使用するChatGPT版数により学習済みデータ作成年月が異なります。ページ概要生成や会話スタイル選択ボタンが用意済みなど、初心者に判り易いユーザインタフェースです。
Geminiは、Googleログイン、Copilotは、Microsoftログインが必要です。Google/Microsoftともにログインユーザ情報を収集し、より良いAI回答や、次期AI開発に活かすためでしょう。
AI活用は、当然の業務になりつつあります。現在AIサービスは過渡期ですが、安定期まで待って利用開始するより今使い始め、回答やその注意点、癖に慣れると、業務AI活用性を高めると思います。
Afterword:パーソナルAIエージェント(AIアシスタント)の鍵、NPU
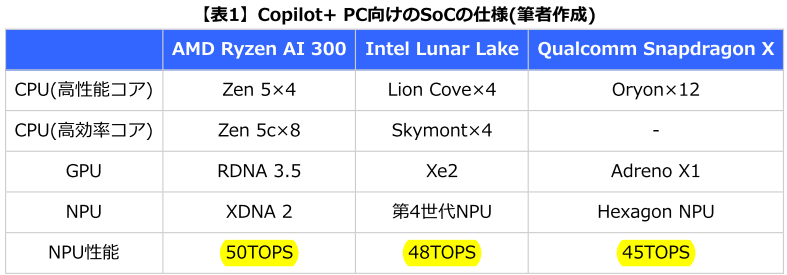
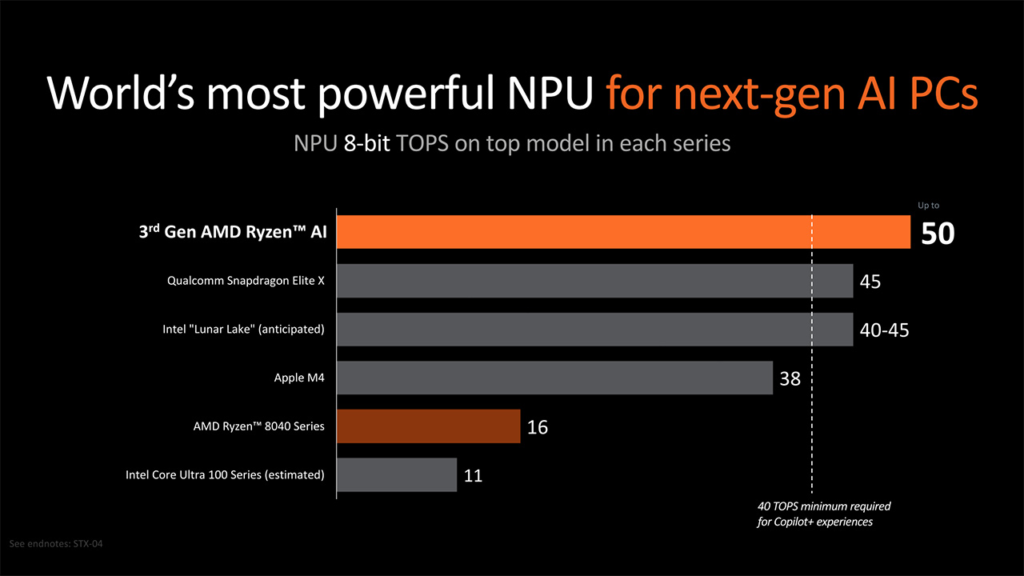
販売中Copilot+ PCのNPU TOPS値は、GPUより小さいのが一般的です。例えば、Lunar Lake SoCは、 トータル120TOPS=NPU48+CPU5+GPU67です。この理由が、コチラの記事で解りました。
つまり、GPUでもできるAI処理を、NPUは徹底的に低電力処理できるようにワットパフォーマンスを最適化します。例えば、数時間のビデオ会議でAIが常時同時翻訳をしても、低電力NPUならバッテリー動作も大丈夫となるなどです。
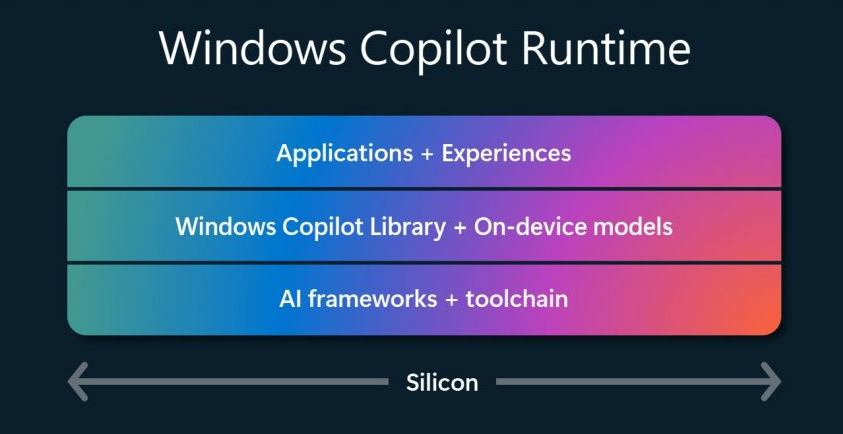
PC/スマホどちらもパーソナルAIエージェント(AIアシスタント)実現に、低電力NPUの常時バックグラウンド学習動作が鍵となりそうです。