AM5ソケット対応のデスクトップAPU:AMD Ryzen AI 400シリーズ(50TOPS NPU内蔵)が、2026年第2四半期より登場予定です。ミニPCやノートPCより遅れましたが、世界初のデスクトップ版Copilot+ PCが登場、自作もできます。
AMD Ryzen AI 400シリーズ位置づけ
昨年11月28日、弊社投稿の新Ryzen AI 400シリーズでは、ミニPC/ノートPC向け旧Ryzen AI 300シリーズ完成度を高めたマイナーチェンジ版だと思っていました。理由は、CPU/GPU/NPUともに300シリーズと同じアーキテクチャで、変更点が最大クロック数アップのみだったからです。
今回3月2日のAMD発表でその位置づけが明らかになりました。AI 400シリーズは、「ミニPC/ノートPCだけでなく、世界初のデスクトップ版Copilot+ PCへも展開できるAPU」だったのです。
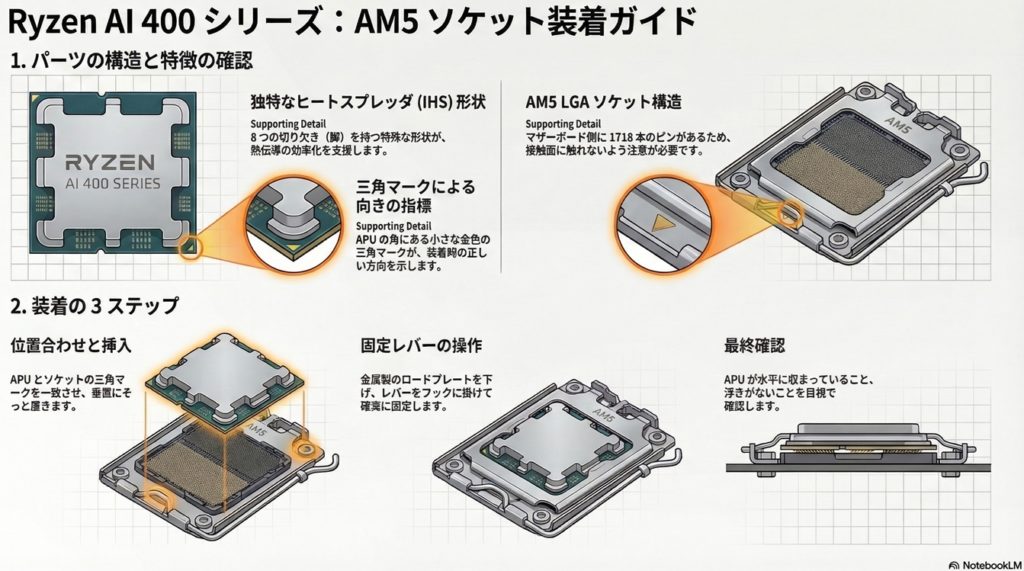
つまり、AM5ソケットWindowsデスクトップPCユーザなら、新しいRyzen AI 400シリーズAPUへ変えればローカルAI処理ができる最新Copilot+ PCになります。PC自作派には朗報です。Thanks AMD!
AM5 WindowsデスクトップPCの確認方法は、CPU-ZがSocket AM5と出力するか、または以下です。
- 7000/8000/9000番台AMD CPU使用中
- DDR5メモリ使用中
Ryzen AI 400シリーズラインナップ
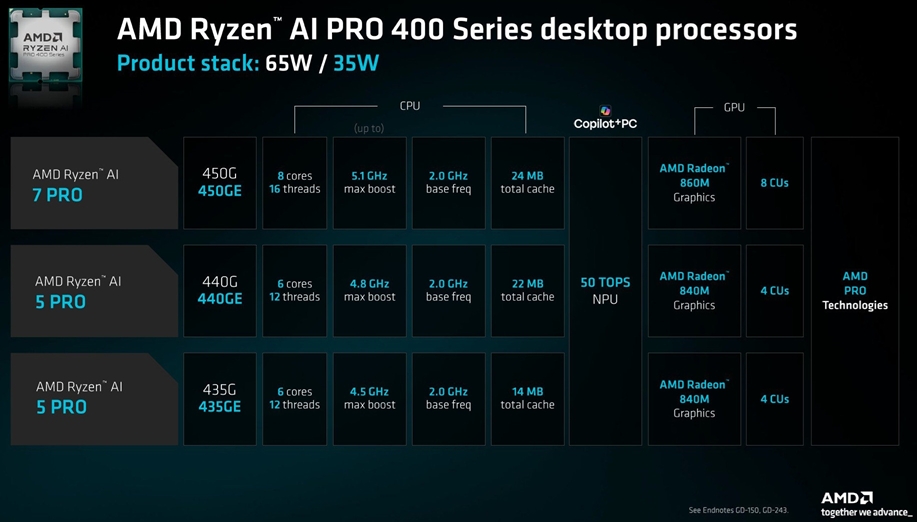
PC自作派が使い易いTDP 65W標準モデルと35Wへ抑えた省電力モデル、セキュリティ強化の企業向けPRO技術付きと一般向けPRO無しモデルがあります(AI 400デスクトップ版ラインナップ、ITmedia、2026/03/02)。
旧Ryzen AI 395ミニPC価格動向
さて弊社は、Ryzen AI 400新発売で旧Ryzen AI 300シリーズ最上位のRyzen AI 395/128GB RAM/2TB SSD搭載ミニPC価格は下がると予想しています。
そこで、現時点の当該2種有力候補の販売価格を調査しました。
- GMKtec社EVO-X2、¥425,999 税込、Amazon在庫有り
- BitPC社FEVM FA-EX9、¥425,999 税込、Amazon 2~3日以内に発送
EVO-X2とFEVM FA-EX9詳細は、コチラの投稿をご覧ください。現時点では、AmazonでFEVM FA-EX9発送ができるようです。今後の価格も調査予定です。
また、価格次第ですがAM5 Windows自作ユーザならAPU載せ替えと128GBメモリ増加も選択肢の1つになります。
Summary:AM5⽤Ryzen AI PRO 400登場
世界初のデスクトップ版AM5ソケット対応APU:Ryzen AI 400シリーズ(50TOPS NPU内蔵)が発売されます。AM5 Windows自作ユーザは、APU載せ替えでCopilot+ PCが実現できます。
新しいRyzen AI 400発売により旧モデルRyzen AI 395/128GB RAM/2TB SSD搭載ミニPC価格の低下を予想しました。現時点の旧モデル価格を調査し予想の検証を行います。