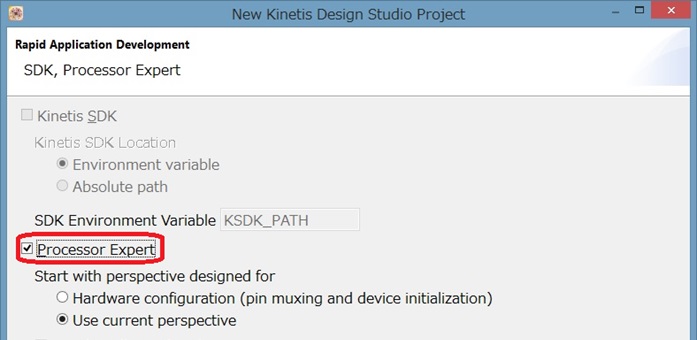
以前示したKinetis Eソフト開発の最重要要素、Processor Expert: PE 、これがテンプレート開発の大きな障壁です。今回は、簡単なPE適用例を示し、PE利用指針とテンプレートに自作PEサンプルソフトを添付する経緯について示します。
3レベルのProcessor Expertコンポーネント PEは、マイコン周辺回路パラメタのGUI設定、パラメタ整合性チェック、デバイスドライバ生成、ユーザソース所定位置へのドライバ自動挿入を行うアドオンツールです。CodeWarrior: CWとKinetis Design Suite: KDSで同じものが使われています。これらの機能は、ルネサスRL78マイコンのコード生成と同じです。PEは、さらにOperating System: OSへの適用と移植性を強く意識した設計 になっています。
このためPEコンポーネントには、3つのレベルがあります。LDD(論理デバイスドライバ)レベルコンポーネント、Highレベルコンポーネント、Lowレベルコンポーネントの3つです。レベルは、コンポーネント抽象度を示し、LDD>High>Lowの順に高く、移植性も高くなります。
コンポーネントレベル 説明
LDD レベル OS利用が前提で、マイコンハードウエアとOS分離が目的のHAL: Hardware Abstraction Layerを適用したデバイスドライバ。OSや機種が変わっても、移植性が高いソースコード生成が可能。
High レベル OSを使わない一般的マイコンのデバイスドライバ。機種が変わっても、移植性が高いソースコード生成が可能。
Low レベル 使用マイコンに依存したデバイスドライバ。周辺回路毎の初期化コンポーネントとメソッド/イベントAPIを提供。
PE想定OSは、freescale無償提供のMQX Liteですが、FreeRTOSなどにも適用できそうです。
Highレベルコンポーネントは、LDDコンポーネントを流用 HighレベルコンポーネントとLDDコンポーネントは、別物ではありません。LDDコンポーネントのパラメタの一部を自動設定し流用しています。ツール開発の立場から言えば、当然でしょう。
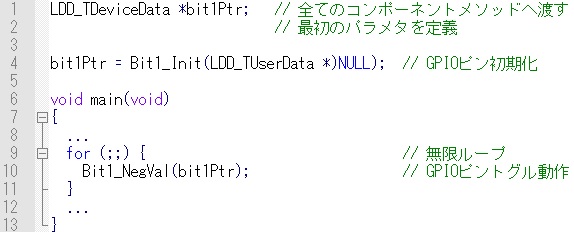
Processor Expartコンポーネント使用例 LDDレベル GPIO処理例を示します。無限ループを回る度にGPIO出力ピンに接続したLEDが点滅する例です。
LDDレベルコンポーネント使用例 面倒なのは、全LDDレベルのAPIに1行目で定義したパラメタが必要なこと です。10行目のトグル動作でさえこのパラメタが必要です。4行目の初期化は、ピン初期値がHighかLowか、出力方向か入力方向かなどのGUIで設定したパラメタが自動設定されます。
Highレベル LDDコンポーネントの代わりにHighレベルコンポーネントを使うと、10行目のパラメタが不要になります。但し、これは、別のところで下記マクロが追加されたために不要になったようにソース記述ができるだけです。
結局、PEコンポーネントは、LDDレベルもHighレベルも同じもの を使っていて、ソース記述時にパラメタ1個分簡素になるだけです。多くのパラメタを使ってAPI移植性を高めている のです。ルネサスのコード生成と比べると、APIパラメタが多く、回りくどく感じます。
Lowレベル Lowレベルのコンポーネントを使用すると10行目のトグル動作は、下記になります。
Lowレベルは、周辺回路毎にメソッド/イベントAPIが提供され、パラメタで具体的な処理位置を指定する必要があり、初期化処理にも多くのLowレベルAPIコールが必要になります。
Processor Expert の課題と利用指針 PEユーザガイドに各レベルコンポーネントの機能説明はありますが、具体的な使用例、つまりサンプルソフトがありません。使用例が無いと機能理解が困難になります。特にLowレベルの記述は、LDDやHighレベルに比べ少ないです。LDDかHighレベルのコンポーネントを使うことがPEの前提条件 で、Lowレベルは、LDDレベルでカバーできない部分のみに使用するのだと思います。
以上から、LDDレベルコンポーネントを使ってテンプレートを開発する方針 とします。そこで、開発に使えそうなサンプルソフトを調査しました。
FRDM-KE02Z40MのCW、KDSサンプルソフト一覧 2014年11月時点で、テンプレート開発評価ボード:FRDM-KE02Z40Mに使えるサンプルソフトを示します。NonPEとは、Processor Expertを使わない従来タイプのデバイスドライバのことです。因みに、NonPEでGPIOトグルを記述すると、PEのLowレベルに近い記述で、下記になります。
サンプルソフト(2014/11E現在) サンプル数 概要
CW10.6 付属 PE Examples 1
評価ボードの3軸加速度センサプロジェクト。使用コンポーネントのデフォルト設定値からの変更箇所が判らない問題あり。
CW10.6 付属 NonPE Examples 29
最も多くのサンプルソフトがあるが、CW専用ドライバでKDSへ移植できない。
KDS1.1.1 付属PE Examples 0
KDS1.1.1付属サンプルソフト無し。自作PEサンプルソフトをKinetis Eテンプレートに 添付予定。
KDS1.1.1 付属NonPE Examples 0
KDS1.1.1付属サンプルソフト無し。
Kinetis SDK1.0.0 0
FRDM-K22Fボードなど5種対応中だが、評価ボード対応版無し。
この一覧表から、現時点のFRDM-KE02Z40Mサンプルソフト状況を纏めると以下となります。
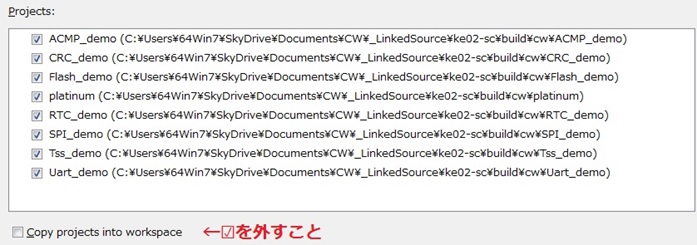
CW PEサンプルソフトは、KDS PEサンプルソフトへのポーティング可能 CW NonPEサンプルソフトは、KDS NonPEサンプルソフトへのポーティング不可能 KDSとPEを開発環境に選ぶと、テンプレート開発評価ボードで使えるPEサンプルソフトは、CW版をポーティングして得られる3軸加速度センサプロジェクト1個のみ
CWのPEサンプルソフトは、KDSへ移植が可能ですが、一部手直しが必要です。また、一番サンプル数が多いCWのNonPEサンプルソフトは、CW専用ドライバで開発されていてKDSへ移植できません。
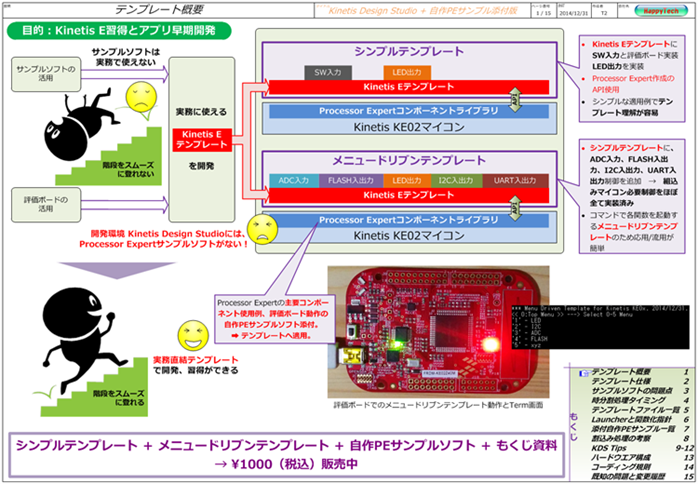
KDS Processor Expert サンプルソフトをKinetis Eテンプレートへ添付 販売予定のKinetis Eテンプレートも従来テンプレートと同様、シンプルテンプレートとメニュードリブンテンプレートの2構成です。さらに、現在のPEサンプルソフト状況を考えると、KDSのPEで動作する自作サンプルソフトをテンプレートと同時提供すれば、テンプレート付加価値が上がります。 つまり、KDS1.1.1付属PE Examplesのサンプル数0を補完 です。
次バージョンKDSでは、freescaleからKDS PE付属サンプルが提供されるかもしれません。しかし、少なくともそれまでの間は、KDS1.1.1のProcessor Expertを使ってFRDM-KE02Z40Mで動作するサンプルソフトは有りません。自作サンプルソフトが目的でテンプレートを購入して頂ける方がいるかもしれません。
繰り返しになりますが、PEのユーザガイドには、十分な機能説明はあります。しかし、サンプルソフトが無いと、せっかくの機能説明も上級者以外には意味不明になります。また、コンポーネントのデフォルトパラメタ設定値のどこを変えたサンプルなのかも明示すると、より解りやすいものとなるでしょう。テンプレート説明資料では、この部分も明らかにします。
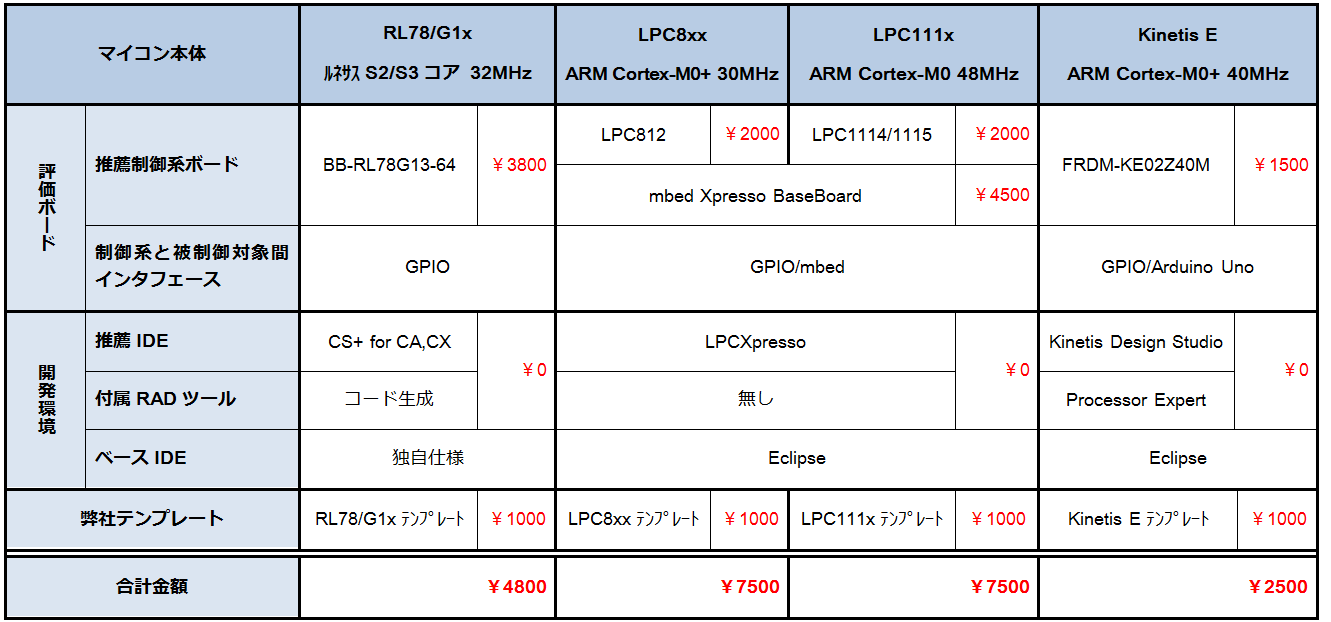
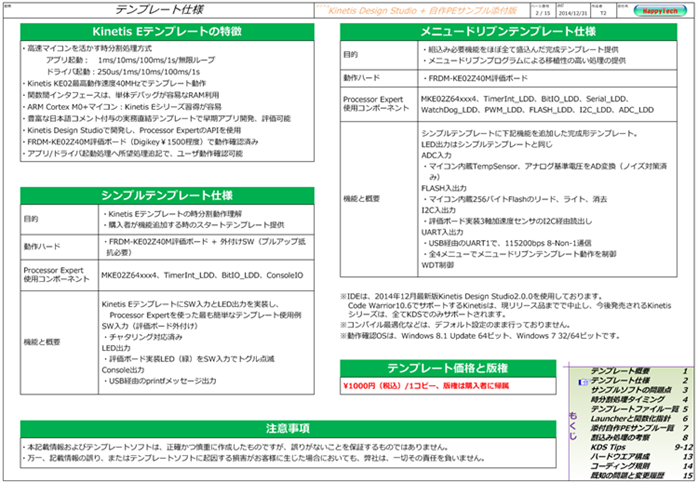
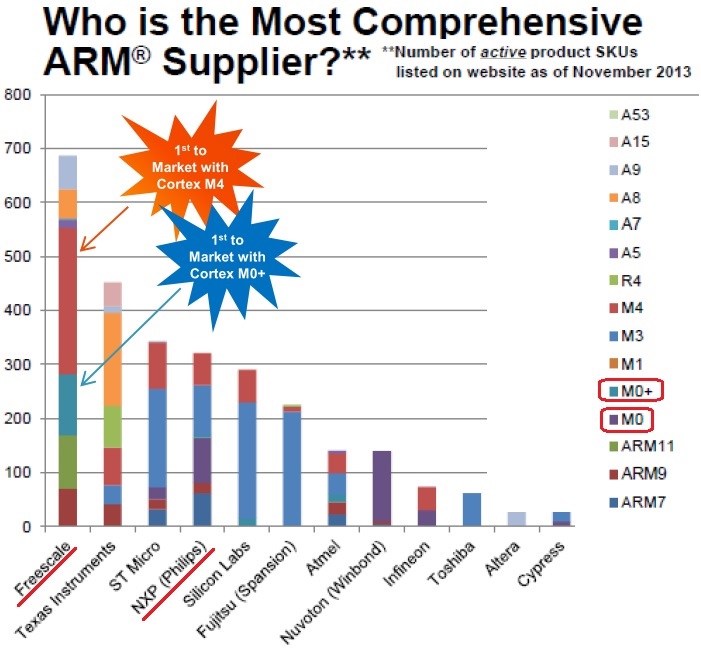
テンプレート対象のKinetis KEマイコンは、低価格で非常に良くできたARM Cortex-M0+マイコンです。統合開発環境は、CWからKDSに変わります。KDSでは、OS使用有無にかかわらず、PEを習得しているほうが、KEシリーズだけでなく、全Kinetisマイコン開発のために有益です。
FRDM-KE02Z40M評価ボードで動作するKinetis Eテンプレートと、多くのKDS Processor Expert サンプルソフトを提供すべく開発中です。