IoTに向けて汎用マイコンも変化しつつあります。今回は、この変化について考えます。
ADC分解能12ビット
最近のマイコンADC分解能は、汎用タイプでも12ビットが標準的です。例えば、LPC824(NXP、2014/10発売)、RL78/I1D(ルネサス、2015/02発売)などです。従来10ビットに比べ4倍の分解能です。
接続されるセンサの性能向上や、マイコン向きの分解能として12ビットが選ばれたと思います。これ以上の分解能になると、キャリブレーションや測定誤差への対応が必須となり、ADC専用ICの領域となるからです。
CPU代替データ転送
DMA:Direct Memory Accessや、DTC:Data Transfer Controllerは、CPUに変わってデータを転送する機能です。CPU転送より低電力で動作するため、ADCとペアで使われるのが一般的です。ADC変換データをDMA/DTCを使ってRAMへ転送し、この間はCPUを休ませる、その目的は、消費電力の低減です。
CPU消費電流低下
マイコンCPU本体の消費電力が改善される好例が、LPC1114(NXP)です。トラ技2012年10月掲載のLPC1114評価ボードのCPUは、LPC1114/301でした。LPC1114/xx1 → xx2 → xx3(xx1の数字が世代を示し、現在は第3世代)で180uA/MHz → 140uA/MHz → 116uA/MHzと世代が進む毎にアクティブ消費電流が36%も低下しました。
これらの変化は、5Vレギュレータ動作から、バッテリーなどのより低く、しかも変動する電圧でも長時間動作する省電力マイコンが目的です。
基本動作モードと省電力動作モード
RL78カタログ資料より抜粋したRL78ファミリの動作モードを示します。
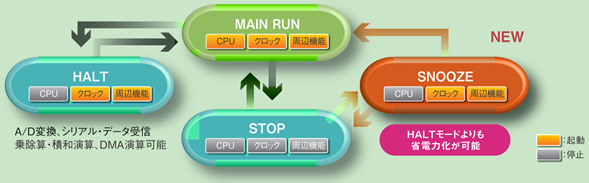
通常動作(MAIN RUN、ARMマイコンの場合はRUN)と低電力動作(HALT、ARMの場合はSLEEP)、動作停止(STOP)の基本3モードに加え、第4の新しい省電力動作モード(SNOOZE)があります。
SNOOZEは、HALTよりも更に低い電力で動作しますが、以下の点に注意が必要です。
- SNOOZE動作するには、STOP動作モードから入る必要あり。
- SNOOZE中に動作する周辺回路は機種によりに異なりRL78/G13、G14の場合は、ADC、CSI00スレーブ受信、UART0データ受信の3機能のみ。
- HALT → MAIN RUNに復帰する時間に比べ、起動時間がかかる。
これらに注意して、開発アプリでSNOOZEが有効に使えるか否かの判断が必要です。
例えば、RL78/G13でADCデータをDMAでRAM転送する場合には、SNOOZEは使えず、HALTで行う必要があります。あるいは、ADCはSNOOZEで行い、データ転送はCPUで行う方法もあります。
どちらが開発するアプリに適しているか、消費電力はどちらが低いか、SNOOZEからの復帰時間は問題ないかを検証し、決める必要があります。
最新マイコンRL78/I1Dは、RL78/G1xに比べこの制約が緩く、より簡単に広い条件で適用できる工夫も施されています。
また、さらに細かい省電力アプリへ対応すべく、10個もの動作モードを持つKinetis Lシリーズ(Freescale)などもあります。
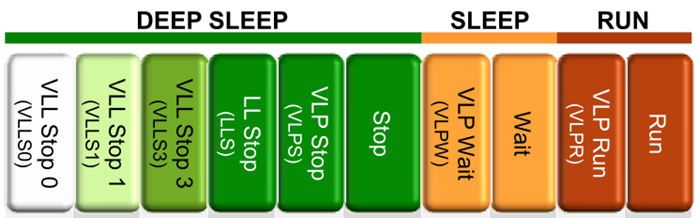
ポイントは、各省電力動作モードの制約条件と復帰時間を考慮したうえでモード選択することです。
現行テンプレートの動作モード
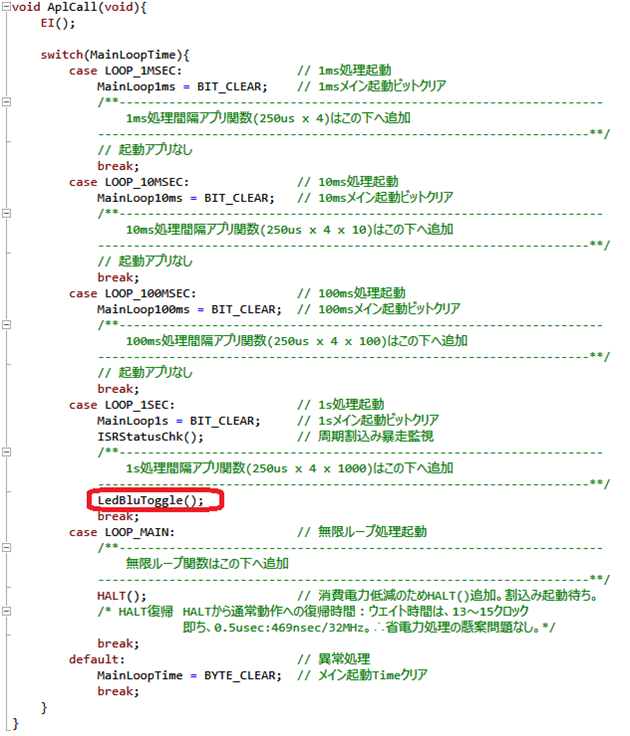
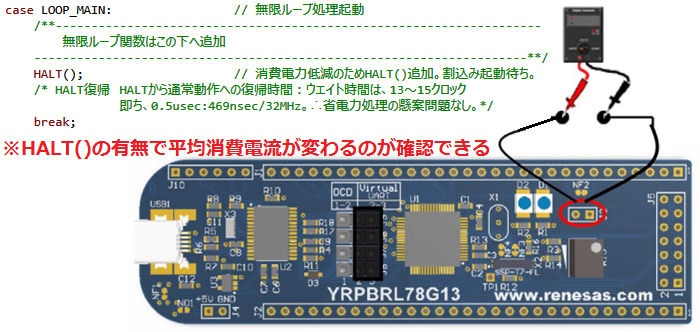
販売中のテンプレートは、通常動作:MAIN RUNと低電力動作:HALT(SLEEP)の2動作モードに対応しています。これは、
- この2動作モードは、全マイコンにあり、機種に依存しないテンプレートとして実現できること
- 省電力化に最も効果があり、通常動作への復帰も高速なので確実(バグなし)に動作すること
が理由です。
省電力動作モードの注意点と裏ワザ
省電力動作モードには、多くの制約条件があります。言い換えると「動作するアプリや環境を想定した動作モード」とも言えます。この省電力動作モードの注意点をまとめます。
- 想定したアプリや動作環境を見極め、それに沿って開発しないと徒労になる
- 通常動作への復帰時間を吟味した上で使わなければ、取れにくいバグを生むリスクがある
- 苦労して省電力動作モードを実装しても、そのモードの全体動作に対する相対時間が少なければ、得られる効果も少ない
実は、前述のLPC1114進化のように、マイコンそのものを初めから低消費電力版へ変えることが一番簡単で確実だったりします(裏ワザ?)。
省電力テンプレートの方針
テンプレートとしても新しい省電力動作モードへの対応が必要です。以下の方針で開発予定です。
- 省電力アプリを特定し、その上で、応用範囲の広い適用例で開発
- 省電力アプリの有効性を確実に示せるマイコンに実装(そもそも省電力動作モードそれ自身に、想定動作があるので機種依存性が生じるのも仕方がないかも…)
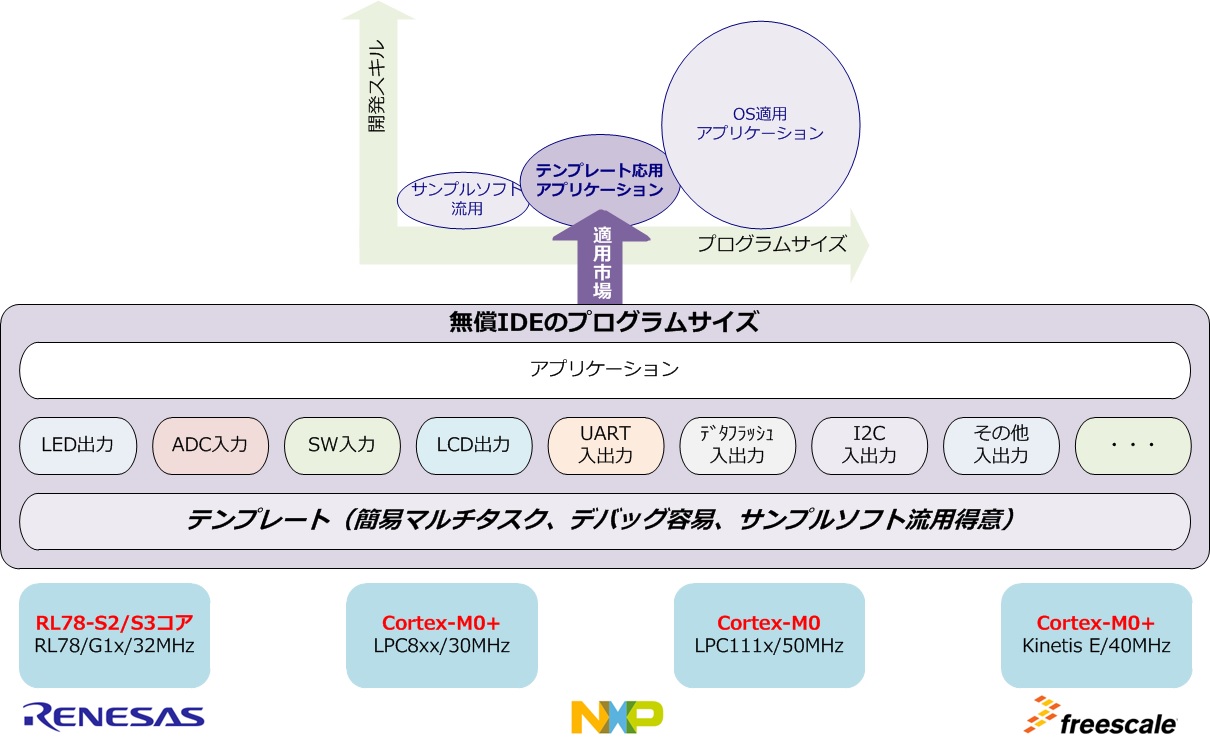
シンプル/メニュードリブンテンプレートに続く第3のテンプレート:省電力テンプレート(仮称)とは、
「通常時は現行テンプレートと同様MAIN RUNとHALT(SLEEP)で処理を行い、一定時間入力が無い場合は、STOPまたはSNOOZEになり、何らかの外部入力で通常動作へ戻る」
などでしょうか?
方針提案に対する、ご意見、ご希望など何なりとお気軽に、info@happytech.jpへお寄せください。参考にさせていただきます。