デバイスが多く選択に迷う方も多いマイコン:MCU。周辺ハードウェアも異なるので、最初のMCUコア選択を誤ると、最悪の場合、開発のし直しなどに繋がることもあります。
本稿は、STマイクロエレクトロニクスのSTM32マイコンマンスリー・アップデート10月号 P8のトレーニング資料、STM32L0(Cortex-M0+)掲載のARM Cortex-M0/M0+/M3の比較資料を使ってMCUコア選択方法についての私案を示します。
STM32L0(Cortex-M0+)トレーニング資料 各種STM32MCU(Cortex-Mx)毎の非常に良くできた日本語のテクニカルスライド資料が入手できます。例えばSTM32L0(Cortex-M0+)は194ページあり、1ページ3分で説明したとしても、約10時間かかる量です。他のMCU(Cortex-Mx)資料も同様です。
開発に使うMCUが決まっている場合には、当該資料に目を通しておくと、データシート読むよりも解りやすいと思います。しかし、Cortex-Mxコア差を理解していない場合や、開発機器の将来的な機能拡張や横展開等を考慮すると、どのMCU(Cortex-Mx)を現状開発に使うかは重要検討項目です。
ここで紹介するSTM32L0(Cortex-M0+)トレーニング資料には、Cortex-M0+特徴説明のため、通常データシートには記載が無いCortex-M0やCortex-M3との違いも記載されています。
そこで、STMマイコンのみでなく一般的なARMコアのMCU選択に重要な情報としても使えるこの重要情報ページを資料から抜き出しました。
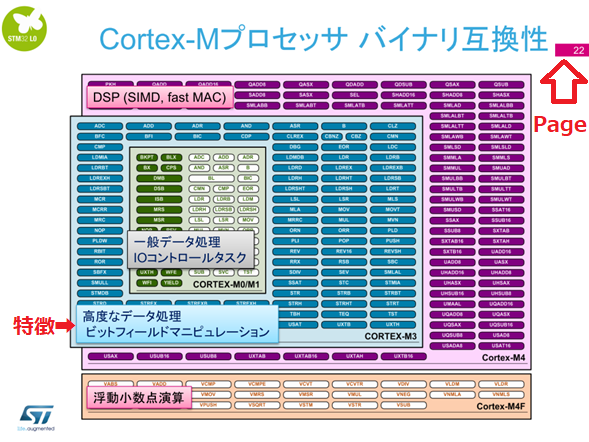
Cortex-M0/M0+/M3比較 バイナリ上位互換性 Cortex-Mxのバイナリ互換性(出典:STM32L0(Cortex-M0+)トレーニング資料) 先ず、P22のCortex-Mプロセッサのバイナリ互換性です。この図は、Cortex-Mxコアの命令セットが、xが大きくなる方向には、上位互換であることを示しています(ただし再コンパイル推薦)。逆に、xが小さくなる方向は、再コーディングが必要です。
つまり、Cortex-M0ソースコードは、M0+/M3/M4へも使えるのです。Cortex-Mxで拡張された命令セットの特徴を一言で示したのが、四角で囲まれた文章です(Cortex-M3なら、“高度なデータ処理、ビットフィールドマニピュレーション”)。
もちろんxが大きくなるにつれコア性能も向上します。しかし、よりCortex-Mx(x=+/3/4)らしい性能を引き出するなら、この四角文章のコーディングに力点を置けば、それに即した命令が用意されているので筋が良い性能向上が期待できる訳です。
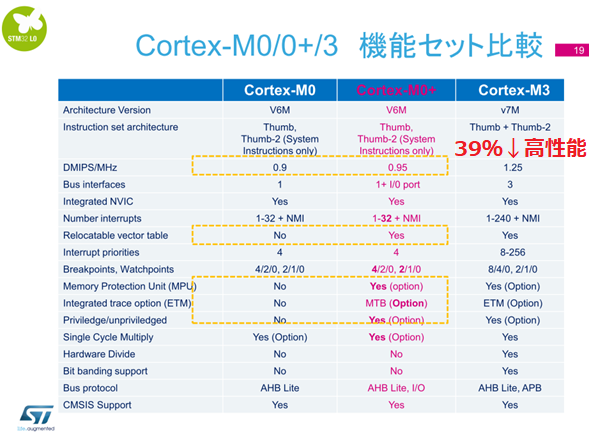
超低電力動作Cortex-M0+、39%高性能Cortex-M3 P22ではCortex-M0とM0+の違いが解りません。そこで、P19のCortex-M0/0+/3機能セット比較を見るとCortex-M0+が、Cortex-M0とCortex-M3の良いとこ取り、中間的なことが解ります。また、Cortex-M3が、M0比39%高性能だということも解ります。
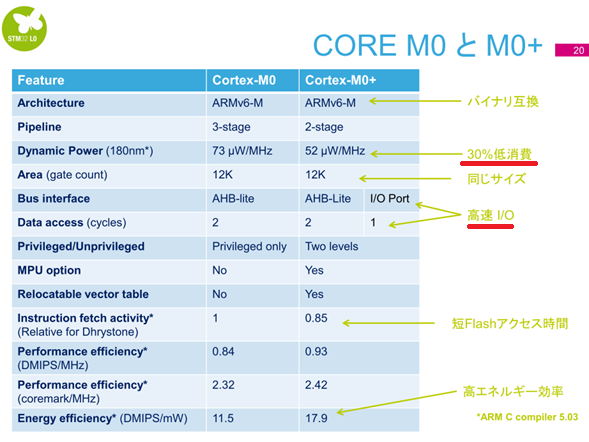
Cortex-M0_M0+_M3セット比較(出典:STM32L0(Cortex-M0+)トレーニング資料) 具体的なCortex-M0+とCortex-M0との差は、P20が解りやすいです。Cortex-M0+は、性能向上より30%もの低消費動作を重視しています。また、1サイクルの高速GPIOも特徴です。Cortex-M0+は、M0の性能を活かしつつより既存8/16ビットMCU市場の置換えにチューニングしたからです。
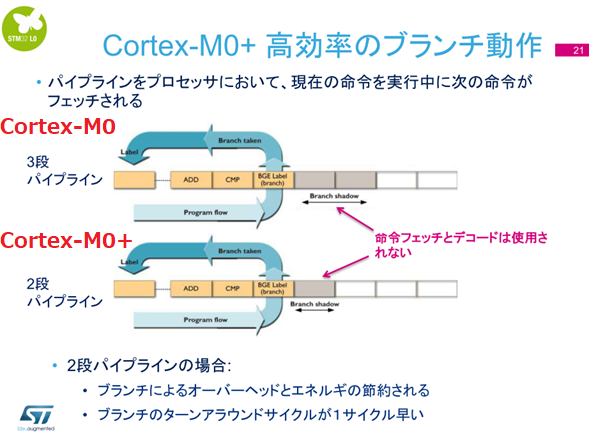
Cortex-M0とCortex-M0+の比較(出典:STM32L0(Cortex-M0+)トレーニング資料) さらにP21には、低電力化に寄与した2段になったパイプラインも示されています。Cortex-M0/M0+は、今年初めから話題になっている投機的実行機能の脆弱性もありません。
Cortex-M0とCortex-M0+のブランチ動作(出典:STM32L0(Cortex-M0+)トレーニング資料) 関連投稿:Cortex-Mシリーズは、投機的実行機能の脆弱性はセーフ
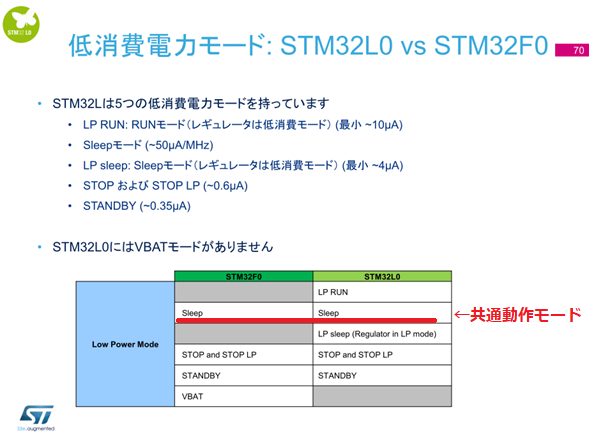
共通動作モード:Sleep Cortex-M0とCortex-M0+の低消費電力モード(出典:STM32L0(Cortex-M0+)トレーニング資料) 低電力化は、Cortex-M0+で追加された様々な動作モードで実現します。この一覧がP70です。つまり、Cortex-M0+らしさは、M0にない動作モード、LP RUNやLP sleep (Regulator in LP mode)で実現できるのです。
逆に、SleepやSTANBYの動作モードは、Cortex-M0/M0+で共通です。さらに、Cortex-M3でも、アーキテクチャが異なるので数値は異なりますが、SleepとSTANBY動作モードはM0/M0+と共通です。
ここまでのまとめ:Cortex-M0/M0+/M3の特徴 Cortex-M0/M0+/M3の特徴・違いを一言で示したのが、下表です(関連投稿より抜粋)。
各コアの特徴は、MCUアーキテクチャや命令セットから生じます。但し、M0/M0+/M3でバイナリ上位互換性があるので、全コアで共通の動作モードがあることも理解できたと思います。
ARM Cortex-Mx 機種 一言で表すと…
Cortex-M0+
超低消費電力ハイパフォーマンスマイコン
Cortex-M0
低消費電力マイコン
Cortex-M3
汎用マイコン
Cortex-M4
デジタル信号制御アプリケーション用マイコン
関連投稿:ARMコア利用メリットの評価
MCUコア選択方法
Cortex-M0またはCortex-M0+コアでプロトタイプ開発を行い、性能不足が懸念されるならCortex-M3コア、さらなる消費電力低下を狙うならCortex-M0+コアを実開発で選択。
早期にプロトタイプ開発を実開発に近い形で作成するために、弊社マイコンテンプレート を利用。
1.は、本稿で示した内容を基に示したMCUコア選択指針です。低消費電力がトレンドですので、プロトタイプ開発の段階から超低消費電力のCortex-M0+を使うのも良いと思います。しかし、初めから超低消費動作モードを使うのでなく、全コアで共通動作モードでの開発をお勧めします。
理由は、万一Cortex-M0+で性能不足が懸念される時にCortex-M3へも使えるソースコードにするためです。プロトタイプ開発の段階では、ソースコードの実開発流用性と実開発の評価を目的にすべきです。チューニングは、実開発段階で行えばリクスも少なくなるでしょう。
2.は、プロトタイプ開発実現手段の提案です。マイコンテンプレートは、複数のサンプルソフトを結合して1つにできます。実開発に使える(近い)サンプルソフトさえ見つけられれば、それらをバラック的にまとめて動作確認できるのです。これにより、当該コアのプロトタイプ評価が早期にできます。
また、マイコンテンプレートで使用したSTM32評価ボードは、ボードレベルでピンコンパチなのでCortex-M0/M0+/M3への変更も簡単です。
関連投稿:マイコンテンプレートを使ったアプリケーション開発手順
MCUコア選択の注意事項:重要度評価 ARMコア向けの弊社マイコンテンプレートは、全てCortex-M0/M0+/M3共通の動作モードで開発しています。
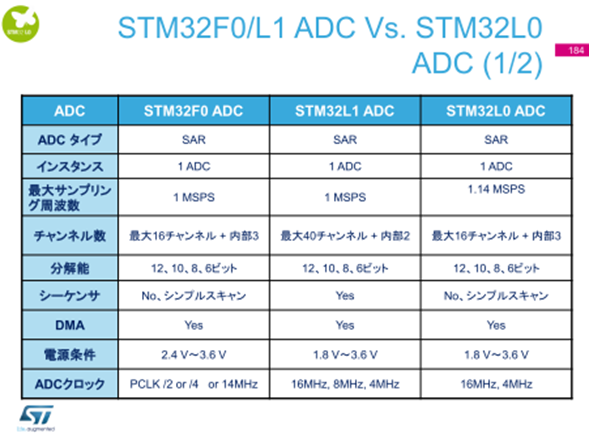
最後に、P184、P185に示されたCortex-M0(STM32F0)とCortex-M3(STM32L1)、Cortex-M0+(STM32L0)のADCの差分を示します。
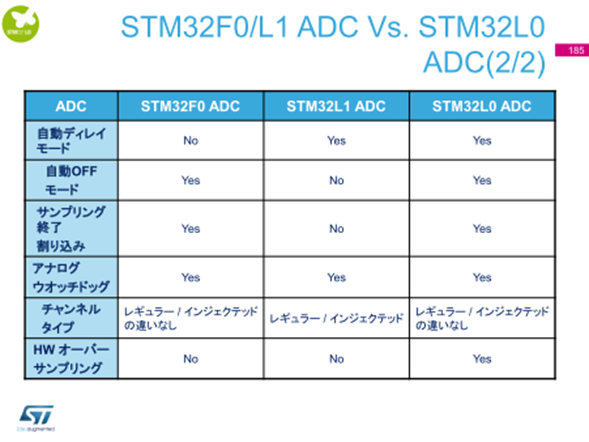
Cortex-M0/M0+/M3のADC比較1(出典:STM32L0(Cortex-M0+)トレーニング資料) Cortex-M0/M0+/M3のADC比較2(出典:STM32L0(Cortex-M0+)トレーニング資料) STM32MCU内臓周辺ハードウェアは、各シリーズで完全互換と先に言いましたが、スペックを細かく見るとこのように異なります。
このハードウェア差を吸収するのが、STM32CubeMXで提供されるHAL(Hardware Abstraction Layer)です。つまり、STMマイコンを使うには、コア選択も重要ですが、STM32CubeMX活用も同じように重要だということです。もちろん、STM32Fxマイコンテンプレート もSTM32CubeMXを使っています。
ARMコアは、バイナリ上位互換ができる優れたMCUコアです。MCUベンダーは、同じARMコアを採用していますが、自社のMCU周辺ハードウェアレベルにまで上位互換やその高性能を発揮できるような様々な工夫・ツールを提供しています。
開発MCUを選択する時には、コア選択以外にも多くの選択肢があり迷うこともあるでしょう。多くの場合、Core-M0/M0+/M3などの汎用MCUコアでプロトタイプ開発を行えば、各選択肢の重要度評価もできます。スペックだけで闇雲に選択するよりも、実務的・工学的な方法だと思います。