半導体不足やサプライチェーン変化など様々な外部要因により、やむをえず開発中のMCUデバイスが変わる場合があります。MCU開発を持続可能にする1案を示します。
MCUと制御対象分離
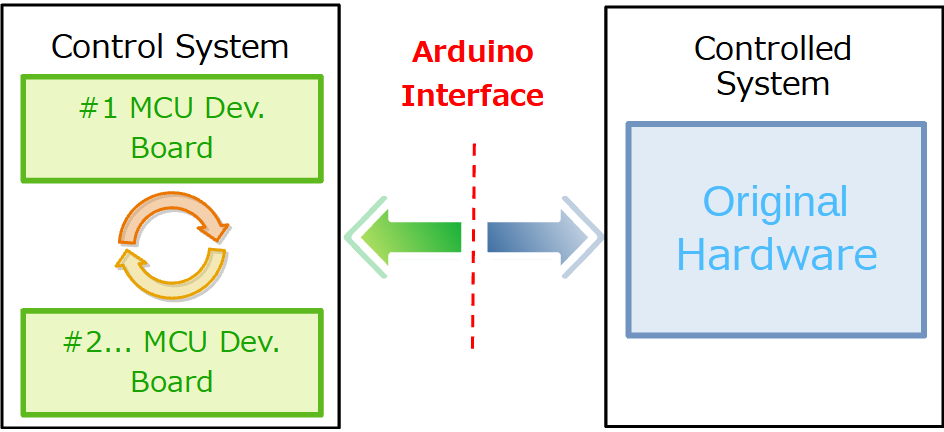
MCUデバイスが例え変わっても、MCUと制御対象間のインタフェースが同じなら開発の持続は可能です。
もちろん開発ツールや制御APIは、MCUベンダやデバイスで異なります。しかしながら、開発した制御シーケンスや注意点などの取得済み開発ノウハウは、そのまま新しいMCUデバイスへも適用できます。
簡単に言うと、頭(MCU)と手足(制御対象)、目などのセンサ入力を分離し、万一の際に、頭(MCU)交換が可能な分離インタフェースを使ってMCU開発することです。
本稿はMCU互換性に主眼を置きますが、分離インタフェース採用で制御対象やセンサも交換可能です。
つまり、機能単位の高性能化、低価格化も分離インタフェース導入で容易になります。
分離インタフェース多数派
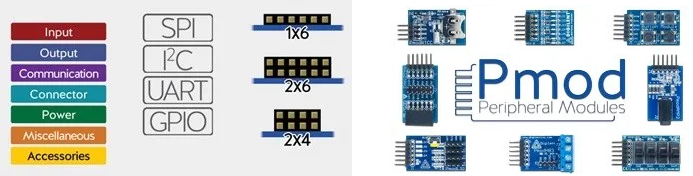
MCUと制御対象を分離するインタフェースも色々あります。例えば、PMODです。
センサやアクチュエータから成る既製PMODモジュールを、Lego™ブロックのように連結し制御対象の機能追加ができます。連結実現のため、I2CやSPI利用が基本です。
別例が、Arduinoです。
多くの主要ベンダMCU評価ボードにArduinoコネクタが採用中です。右下に示すように、デジタル入出力ピン、アナログ入力ピンなど、ピンが物理的に機能分離しています。
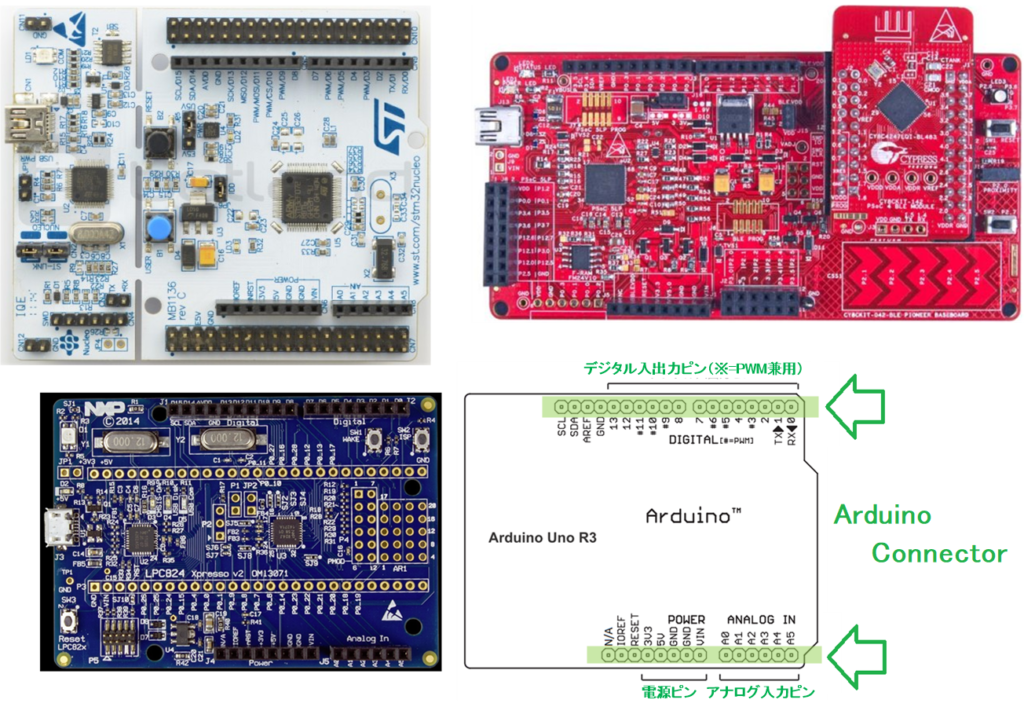
既製Arduinoモジュールも多く、しかも安価に入手できます。また、機能別ピンのため、手持ちセンサなどを接続し動作を試すのも簡単です。
元々はArduinoやRaspberryなどのMPU(Micro Processor Unit)向け分離インタフェースでしたが、シンプルで使い易いためMCU評価ボードにもArduinoコネクタ適用例が多く、分離インタフェースの多数派となりました。
Tips:MCU端子は、複数機能から選択が可能です。そこで、Arduinoピン機能を優先して選択し、この選択した端子から先に使用すると、MCU交換時の互換性が高まります。
Arduinoプロトタイプシールド
Arduinoモジュールは、別名シールドと呼ばれます。シールドを複数スタック接続し機能追加も可能です。
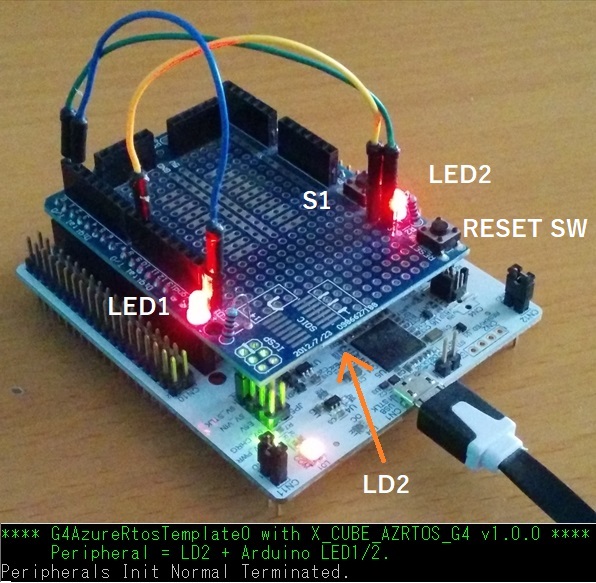
MCU評価ボードのArduinoコネクタにスタック接続し、付属する小型ブレッドボード上で簡単な回路も追加できるプロトタイプ向けのシールドが、Arduinoプロトタイプシールドです。
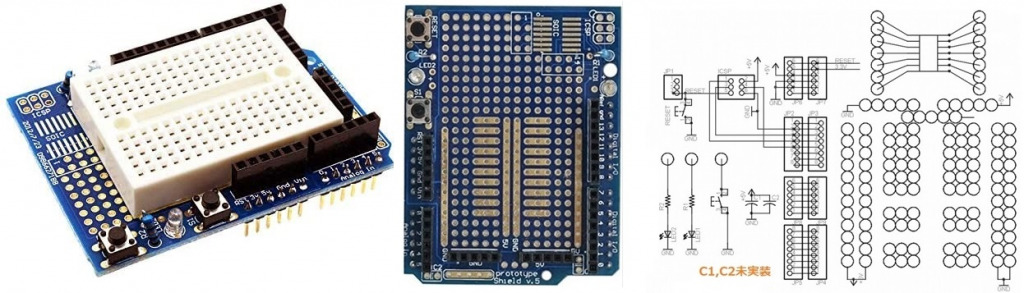
このシールドには、2個のLEDと1個のSWが実装済みです。MCU評価ボードへ、LEDやSWを簡単に追加でき、手持ち部品などを使ってプロトタイプ開発する場合に最適だと思います。
まとめ:持続可能MCU開発
世界平和やサプライチェーン変化などの外部要因により、開発中のターゲットMCUデバイスやベンダが変わる場合がありえます。
万一MCUデバイスが変わっても、MCU開発を持続可能にするため、各ベンダMCU評価ボードに多数採用のArduinoコネクタを使ったMCUと制御対象分離構成を示しました。
Arduinoプロトタイプシールドを、プロトタイプMCU開発に適す使用例として示しました。