サーバやネットワーク機器を安全に管理運用する施設がデータセンタです。世界規模の生成AI需要急増に対し、米)大手AI企業の日本国内へのデータセンタ新設が話題です。2024年4月21日その背景が、欧米に比べ日本のプライバシー規制の緩さだとTV放送がありました。
筆者は、地震国日本にAI関連投資が盛んな理由は、地理的に離れたデータセンタ間を、低遅延接続できるIOWNがあるからだと思います。このリアルタイムネットワークAI処理の要、IOWNを説明します。
データセンタ間IOWN接続遅延
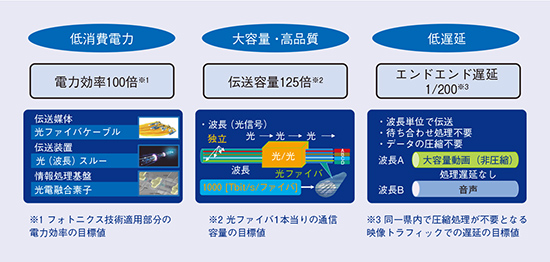
光電融合デバイスによるNTT IOWN APN(オールフォトニックス・ネットワーク)は、従来比電力効率100倍、伝送容量125倍、エンドエンド遅延1/200が目標です(関連投稿はコチラ)。
2024年4月12日、NTTは、IOWN APNの英国と米国でのデータセンタ間接続実証結果を発表しました。
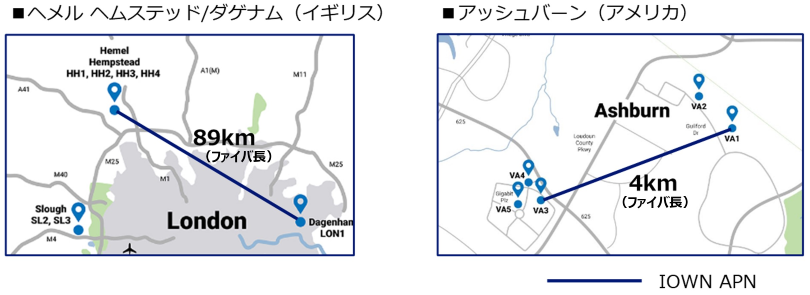
| 400Gbps通信 | データセンタファイバー距離(km) | 遅延時間(ms) | 遅延揺らぎ(μs) |
| London、UK | 89 | 0.893 | 0.035 |
| Ashburn、US | 4 | 0.062 | 0.045 |
同一施設データセンタ間遅延規定<2ms
同じ施設、場所の複数データセンタ間の接続遅延は、2ms以内の規定があります。
従って、IOWN APN実証結果の遅延1ms以下、揺らぎ1μ秒以下は、例えデータセンタ設置場所が離れていても、規定2ms以内を満たし、同一施設データセンタとして機能することが判ります。
また、IOWN APN回線は、ダークファイバー新設無しで波長追加により提供できることも特徴です。APN提供までの時間短縮が可能だからです。
※ダークファイバーとは、敷設光ファイバーのうち、未使用で光信号が稼働していない(ダークな)芯線。
つまり、地理的に分散したデータセンタ間をAPNで接続しておけば、地震や過負荷トラブル発生時でも当該データセンタの負荷をAPNで別の場所へ移動できます。そして、あたかも同一施設のデータセンタのように稼働を続けられます。
データセンタ信頼性向上に役立つIOWN APNは、地震国日本ならではのネットワーク技術です(関連記事:NTT光ファイバー分岐・合流に世界初成功)。
NTTは、これら特徴や欧米でのAPN実証実験により、光電融合デバイスネットワークIOWN APNを、生成AIデータセンタや金融分野向けのワールドワイドインフラとして普及を狙っています。
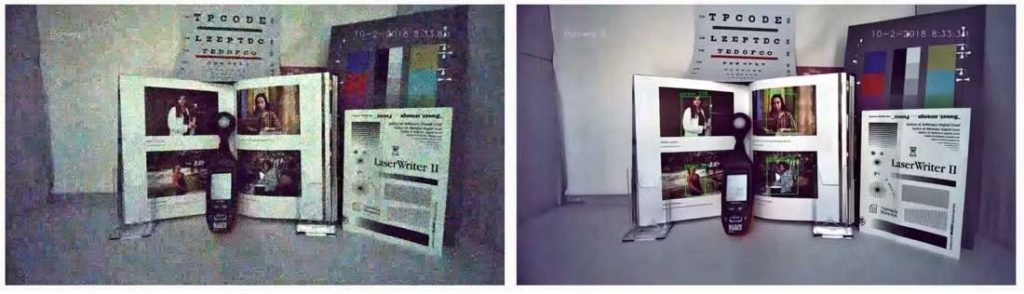
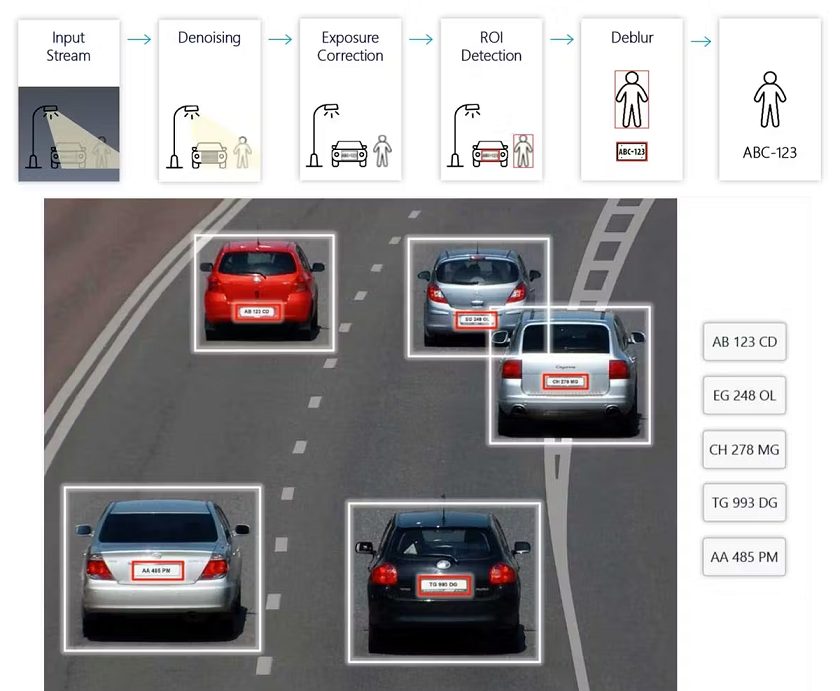
郊外データセンタと市中カメラのAPN接続
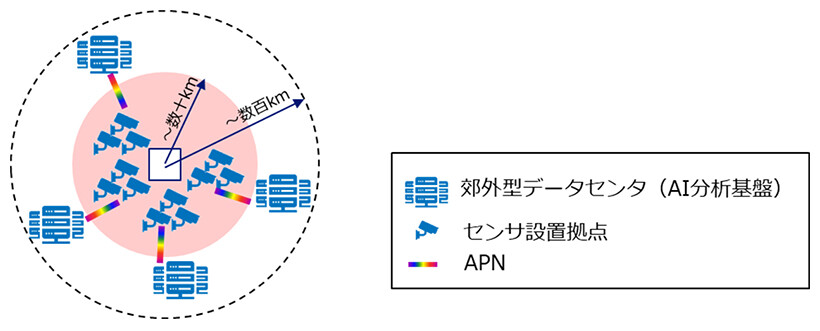
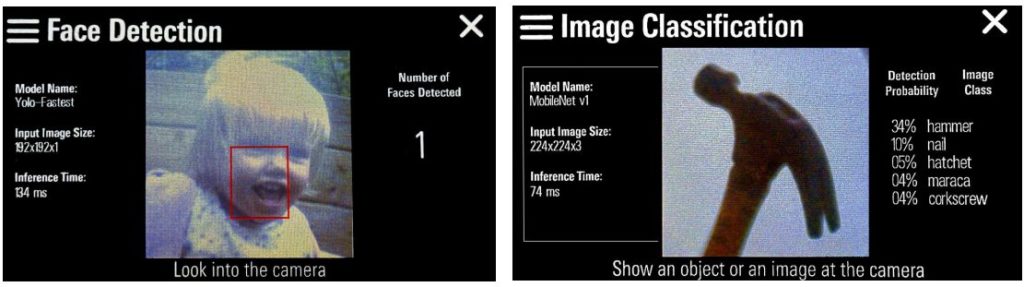
また、NTTは2024年2月20日、武蔵野市データセンタと横須賀市設置カメラ間の100kmをIOWN APNで接続し、郊外データセンタで市中カメラのリアルタイムAI分析実験を行いました。
これは、超高速ネットワークを活かしたリアルタイムクラウドAI処理例です。但し、超高速ネットワーク回線が十分安くなった時の話です。未だ高価なIOWN1.0ですが、IOWN4.0で現状インターネット並み価格になった後の話です。
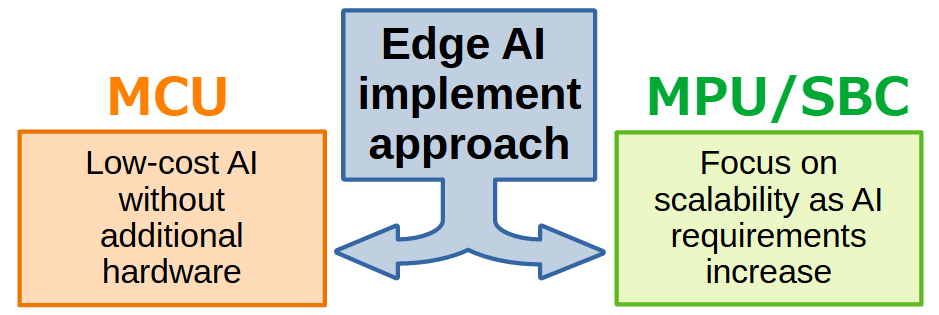
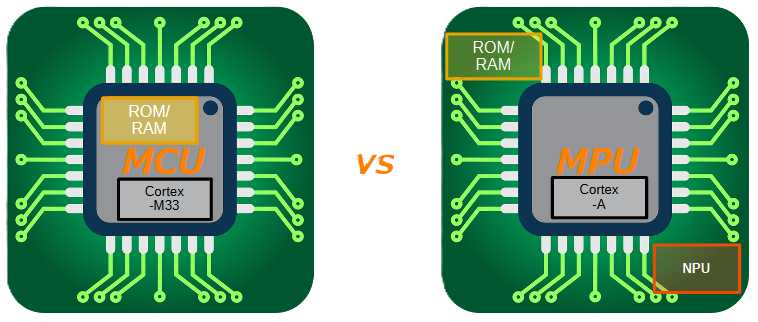
それまでは、クラウド側よりもエッジ側でAI処理を行うアプローチが、AI処理遅延、電力消費の点から現実的だと思います(関連投稿:エッジAI導入アプローチ)。
日本への欧米AI投資

AI関連投資は、データセンタだけではありません。
2024年4月15日、米OpenAIは、アジア初のOpenAI Japan始動を発表しました。日本語最適化GPT-4カスタムモデルの提供を開始するそうです。2024年4月10日、米Microsoftも、日本へAI研究所など今後2年間で29億ドルの投資を発表済みです。
もちろん日本側AI投資も盛んです。例えば、4月19日、KDDI の1000億円、4月23日、ソフトバンクの1500億円投資などです。
いずれの投資も、高信頼ネットワークインフラ技術IOWNが日本にあるからです。
Summary:生成AIデータセンタとIOWN
生成AIやインターネット金融の要であるデータセンタは、災害やセキュリティ事故などのリクスに強いことが必要です(日本データセンタより)。
世界規模の生成AI需要急増に対し、地震国日本で米)AIデータセンタ新設やAI関連投資が盛んな背景は以下です。
- 欧米よりも緩い日本のプライバシー規制
- データセンタ地理的分散配備を可能とする低遅延NTT IOWN APN接続
Afterword:次回投稿5月10日(金)
来週5月3日(金)は、ゴールデンウイーク中のため休みを頂き、5月10日(金)に次回投稿します。