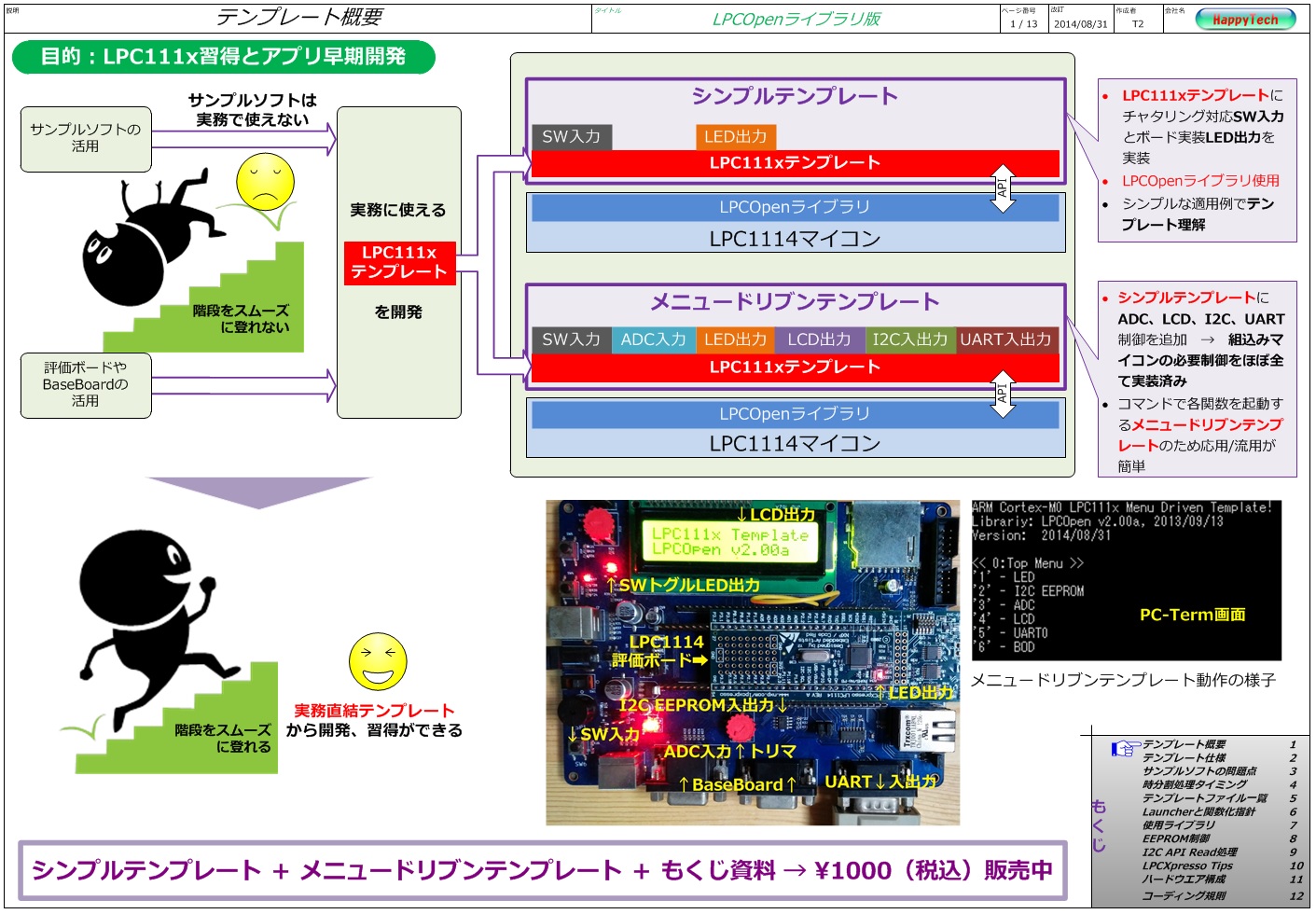
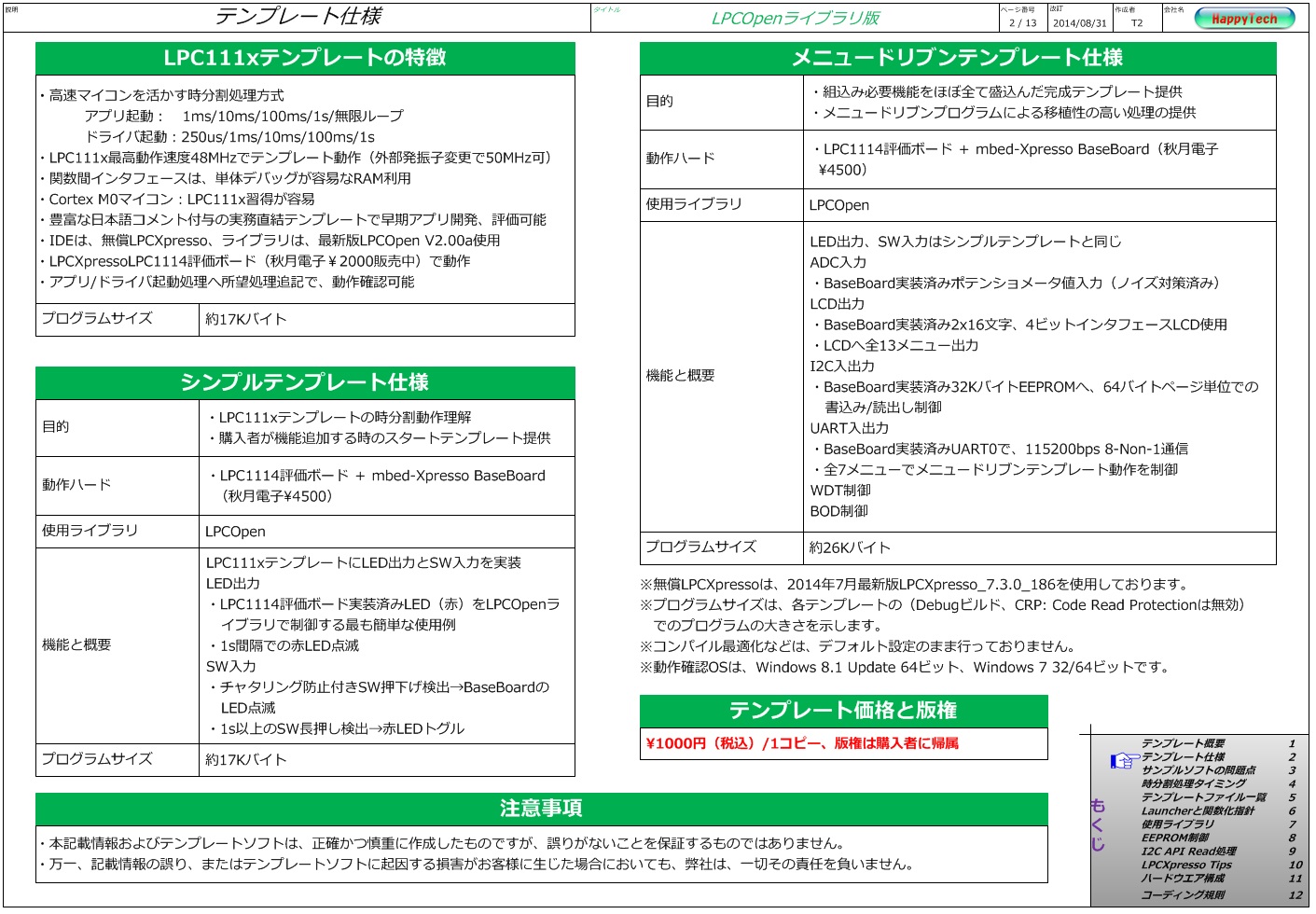
2014年末発売予定のfreescale Kinetis EテンプレートのマイコンKE02Z64xx4の特徴と評価ボード、開発環境を示します(発売済みテンプレート一覧はコチラ)。
5V Cortex-M0+ マイコン:MKE02Z64xx4仕様(一部抜粋)
| 動作電圧 | 2.7~5.5 V (ワイドレンジ電源電圧) |
| ARMコア | Cortex-M0+/40MHz Single cycle 32-bit x 32-bit multiplier Single cycle fast I/O access port |
| メモリ | ROM:64KB EEPROM:256B RAM:4KB |
| アナログ入力 | 12-bit SAR ADC Two analog comparators |
| 通信 | Two 8-bit Serial Peripheral Interfaces (SPI) One I2C modules Three UART modules |
| タイマ | One 6-channel Flex Timer/PWM (FTM) Two 2-channel Flex Timer/PWM (FTM) 2-channel Periodic Interrupt Timer (PIT) Real time clock (RTC) System tick timer One watchdog module |
| GPIO | 57 |
| 価格 | 300円程度、DigiKey調べ(2014年9月時点) |
評価ボード:FRDM-KE02Z40M
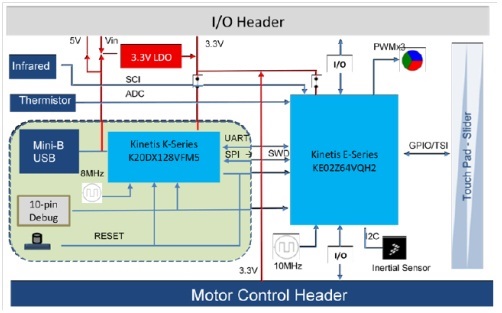
| 搭載マイコン | MKE02Z64VQH4 |
| ボード実装回路 | 10MHz水晶発振子 3色LED 3軸加速度センサ タッチパッドスライダ 赤外線センサ 温度センサ |
| デバッグIF | OpenSDA |
| 価格 | 1500円程度、DigiKey調べ(2014年9月時点) |
※この評価ボードへ、LPC8xxやLPC111xテンプレートで使ったBaseBoardのUARTドライバやLCDを接続予定です。
開発環境:IDE
統合開発環境IDEは、CodeWarrior:CWと、Kinetisシリーズ専用のKinetis Design Suite:KDSの2つあります。サンプルソフトが豊富で参考情報も多く、歴史が古いのがCWで現版数10.6。Kinetisシリーズ以外の5種freescaleマイコン開発もできます。インスト後、30日間は容量制限なし、有償登録しない場合は、256KB128KBの制限付きになりますが、Kinetis開発には問題なしです。
今年夏、新規開発されたKDSは、ARM Cortex-M0+マイコンKinetisシリーズ専用で、現版数1.1.1です。freescaleは、今後、CWからKDSでKinetisシリーズをサポートするとアナウンスしています。
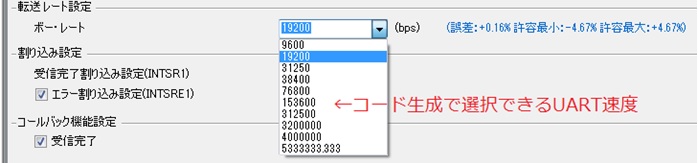
どちらのIDEも、eclipseベースです。Processor Expert:PEと呼ばれる強力なAPI生成ツールがプラグインされており、このPEを使うと、素早く移植性の高いソフトが作れそうです。ルネサスCubeSuite+のコード生成ツールと似ています。
両者をサラッと使ってみた結果、現段階では、サンプルソフトや有用な情報も多いCWをテンプレート開発に使います。開発マイコンをKinetisのみにしてインストールすると、KDSと同程度のプログラムサイズになります。KDSには、豊富なCWサンプルプロジェクトをKDS用へ変換するマニュアルがあるのですが、私は上手く変換できなかったため、現版KDSは、使うのを断念しました。
Kinetis Eテンプレート開発ポイント
Kinetis Eシリーズは、「ARM Cortex-M0+コアで5V動作」する業界初のマイコンです。入手性が良く、低価格、評価ボードの豊富な実装回路も魅力です。PEを上手く使って、移植性に富んだKinetis Eマイコン向けテンプレートを開発したいと思います。
ポイントは、この「Processor Expert:PEの効果的活用」です。このあたりは、追々本ブログにノウハウ等を記事にする予定です。