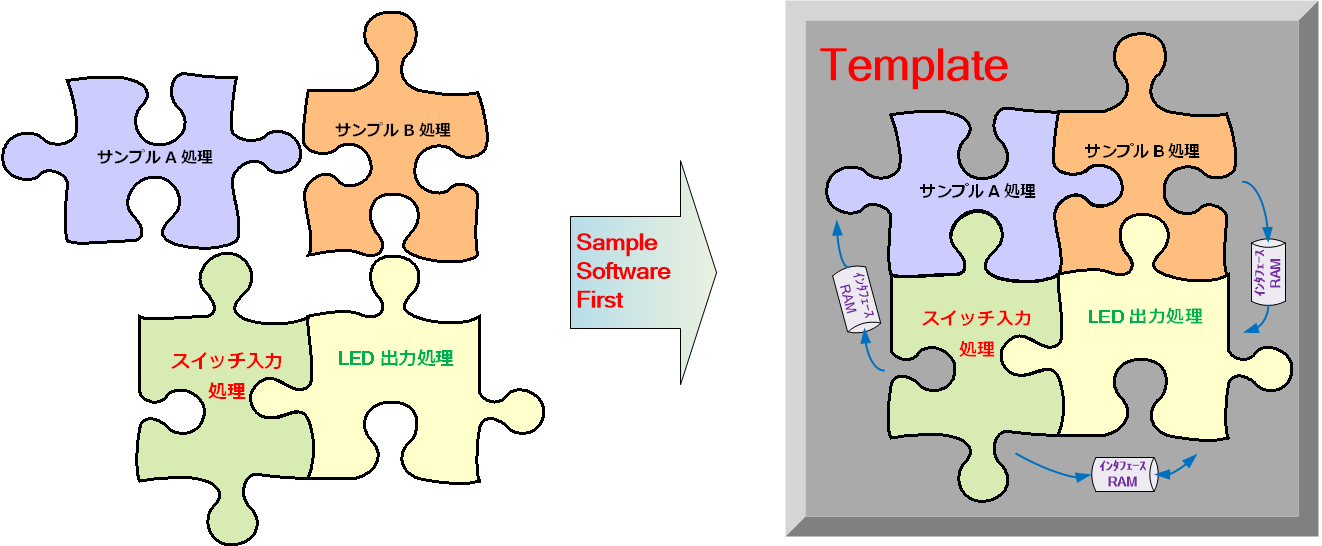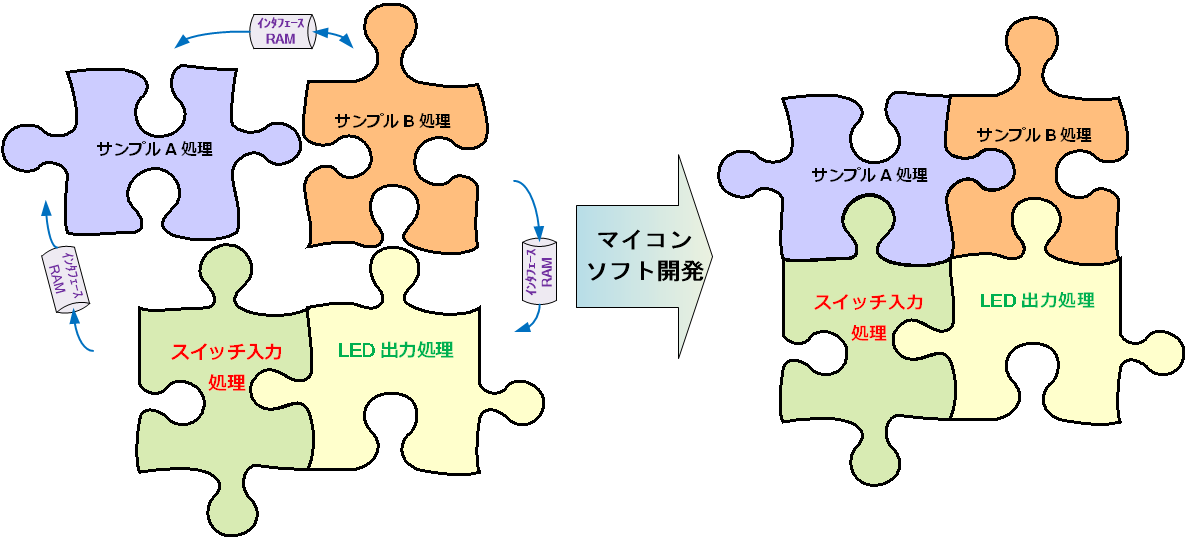
前投稿で、プロトタイピング開発に、マイコンテンプレートが適すと説明しました。その理由は、テンプレートの既に出来上がった汎用処理へ、顧客要求機能を追加しさえすれば、早期に顧客ソフトウェア開発がほぼ完成するためです。つまり、顧客仕様の開発に、より集中できるのです。
働き方改革と、今後も増える仕事量、このバランスを開発者が保つには、選択と集中です。
集中すべきは顧客独自仕様、それ以外は既存資産をより流用活用するテクニックを身につけることです。
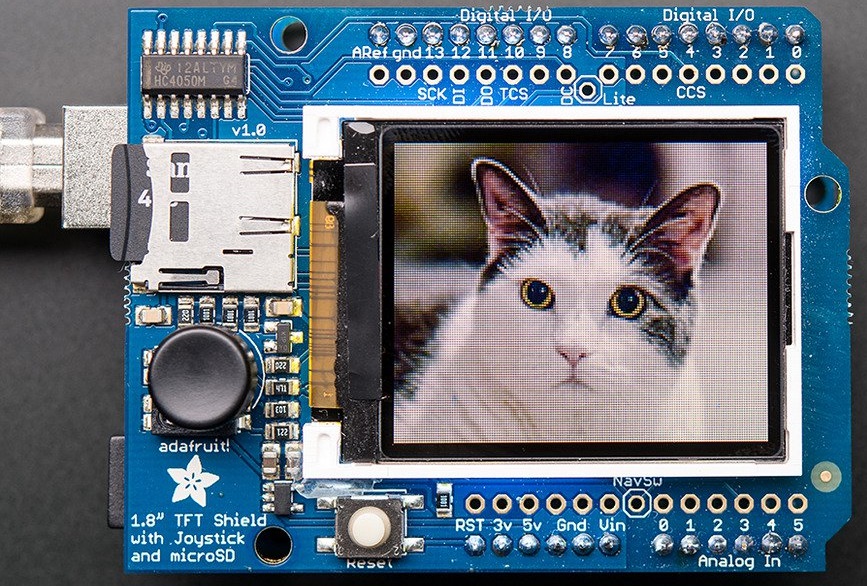
具体的にこのこと説明するため、今回から数回に分けて、マイコンテンプレートと評価ボードに、上図Arduino SPI接続シールド基板を追加する開発例を使って、プロトタイピング開発にテンプレートが適すことを説明します。
テンプレート活用開発例の前提条件
- マイコン:STM32F072RB(STMicroelectronics)
- マイコンテンプレート:STM32Fxテンプレート(HappyTech)
- マイコン評価ボード:Nucleo-F072RB(STMicroelectronics)
- Arduino SPI接続シールド基板:1.8” TFT Shield with Joystick and microSD (Adafruit)
途中、別内容の投稿もありますので、3カ月程度の期間で7~10件程度のシリーズ投稿を予定しております。
STM32F072RB/Cortex-M0コアを用いますが、STM32FxテンプレートのCortex-M3コア/STM32F103RBでも同様です。また、投稿カテゴリーはSTM32マイコンですが、他マイコンのテンプレートを使用中、検討中の方も参考にしてください。
様々なシールド基板がある中で、SPI接続シールドを選択した理由は、マイコンでも従来のGPIOによるLCD表示から、よりリッチなSPI:Serial Parallel InterfaceによるカラーLCD表示に変わりつつあることが背景です。詳細は、コチラの投稿を参照してください。
Arduino SPI接続シールド基板構成
Adafruitの1.8“カラーTFTシールド(128×160ドット)、microSDカードスロットとジョイスティック搭載基板(3,680円)は、秋月電子から入手できます。
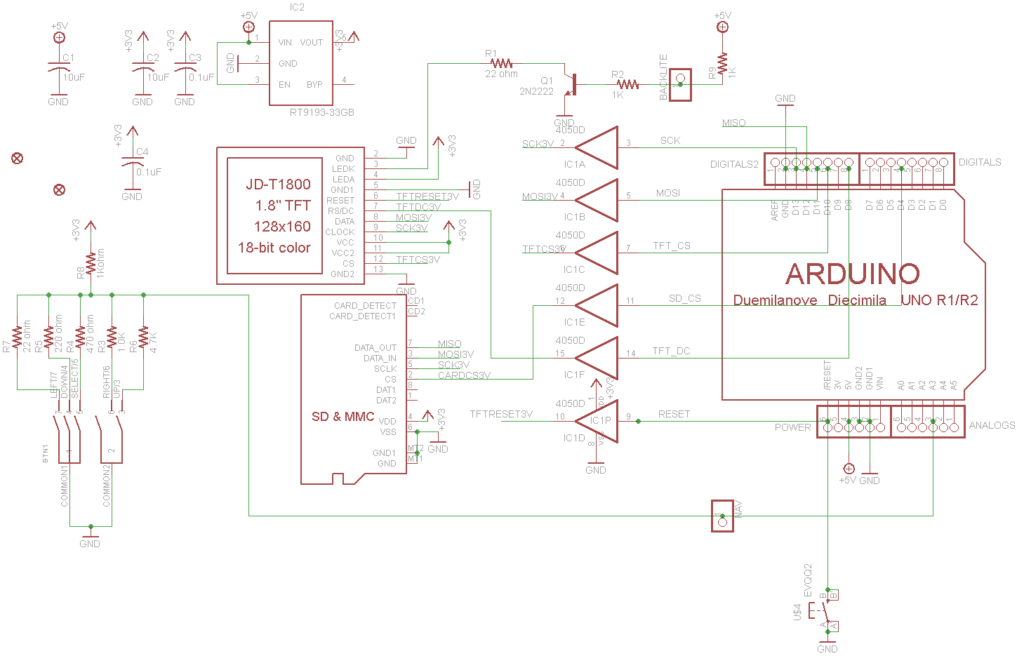
このシールド基板は、TFT液晶出力、SDカードのデータ入出力、Joystickでの5SW入力、これら3機能を、マイコン評価ボードArduinoコネクタに装着するだけでハードウェアの追加ができます。
そこで、テンプレートへシールド3機能のソフトウェアを追加していきます。これにより、Joystickのみ、SDカードのみ、あるいは全機能の追加などいろいろなバリエーションの開発例を説明します。
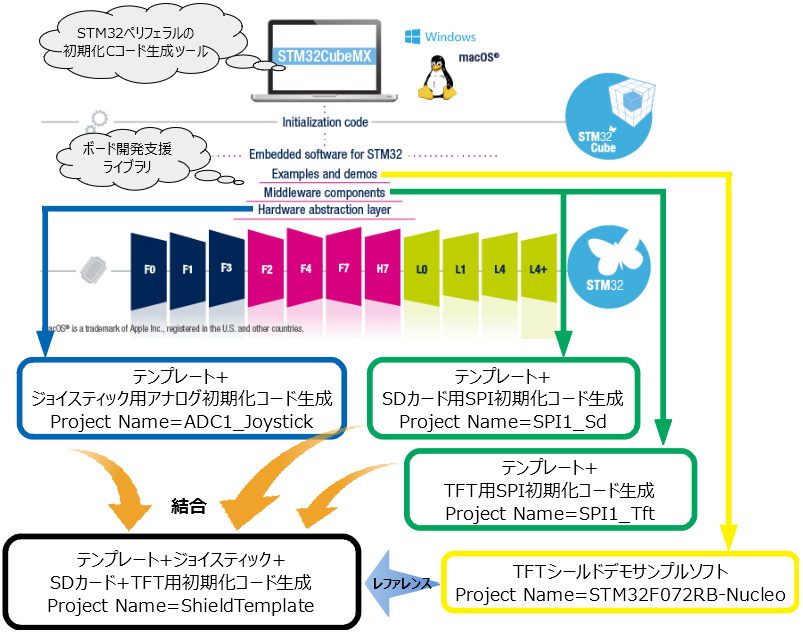
サンプルソフト、レファレンスソフト構成と開発方針
本開発に使えるサンプルソフトや既存ライブラリを一覧にし、開発方針を図示しました。
Arduinoのシールド基板には、C++ライブラリが付属していますが、これはArduinoでの動作が前提なので、マイコンにはそのまま使えません。
上手いことに開発環境SW4STM32には、使用するArduino SPI接続シールド基板のデモサンプルソフトが付属しています。但し、このデモソフトは、エキスパートが自作したExamples and Demosなので、部分的に機能を切出そうとすると、解析や変更に手間取ります。
せっかく初期設定生成ツール:STM32CubeMXや、評価ボード開発支援ライブラリのBSP:Board Support Packageがあるのですから、これらツールやライブラリを活用しない手は無いでしょう。
そこで、図示したようにデモソフトは、レファレンスとして活用し、極力STM32CubeMXやBSPを使ってエキスパート自作ソフトと同じものを、初心者でも開発できることを開発方針とします。
シリーズ投稿の予定内容
実際に着手しないと投稿内容は確定しませんが、一応の目安として、下記内容の投稿を目標、予定しています。
第1回、シールド基板、サンプルソフト、レファレンスソフト構成と開発方針(←今回の投稿)
第2回、BSP、FatFs、STM32CubeMX、デモソフト、アプリケーションノートなどの活用/流用可能ソフトウェア概要
第3回、Joystick機能のテンプレート追加:Joystickのみ追加希望の方は、ココまでで開発できることを目標にします。
第4回、SDカードリード/ライト機能のテンプレート追加:SDカードのみ追加希望の方は、ココまでで開発できることを目標にします。
第5回、TFT表示機能のテンプレート追加:TFT表示のみ追加希望の方は、ココまでで開発できることを目標にします。
第6回、SPIシールドテンプレート構成:シールド3機能全てを追加する場合のテンプレート構想
第7回、SPIシールドテンプレート開発:シールド基板活用のTipsなどの資料も含むテンプレート化を目指します。
このように、現在のGPIO LCDを使ったテンプレート応用例Baseboardテンプレートに加えて、最終回にはSPIシールドテンプレートとして発売できれば完成です。ご期待ください。
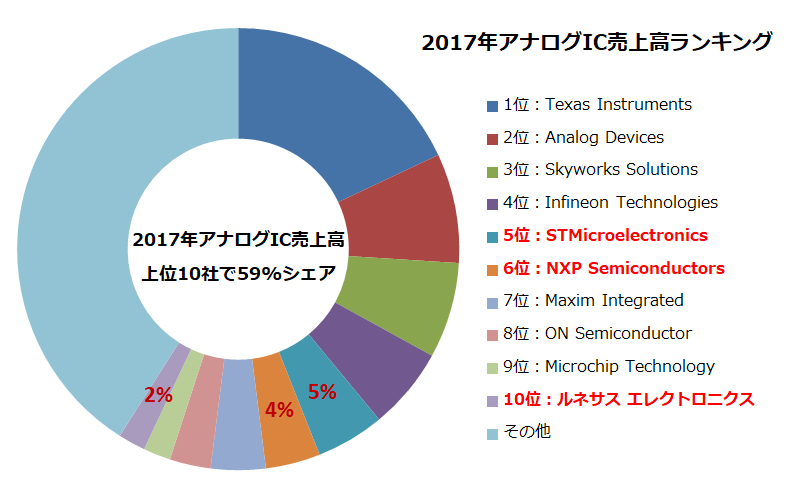
Yano E plus 2018.5にHappyTech掲載
シンクタンクの矢野経済研究所様の月刊誌Yano E pulsの2018.5、注目市場フォーカス:MCU(マイコン)市場の6-7に、弊社HappyTechが掲載されました。MCUの現状、2021年までの市場予測、ベンダー各社動向などがまとめられたレポートです。お近くに冊子がある場合には、ご覧ください。